13 Fuzzy Systems and Computational Intelligence -...
48
13 Fuzzy Systems and Computational Intelligence Fuzzy Systems Engineering Toward Human-Centric Computing
Transcript of 13 Fuzzy Systems and Computational Intelligence -...

13 Fuzzy Systems andComputational Intelligence
Fuzzy Systems EngineeringToward Human-Centric Computing

13.1 Computational intelligence
13.2 Recurrent neurofuzzy systems
13.3 Genetic fuzzy systems
13.4 Coevolutionary hierarchical genetic fuzzy system
13.5 Hierarchical collaborative relations
13.6 Evolving fuzzy systems
Contents
Pedrycz and Gomide, FSE 2007
13.1 Computational intelligence
Pedrycz and Gomide, FSE 2007
Pedrycz and Gomide, FSE 2007
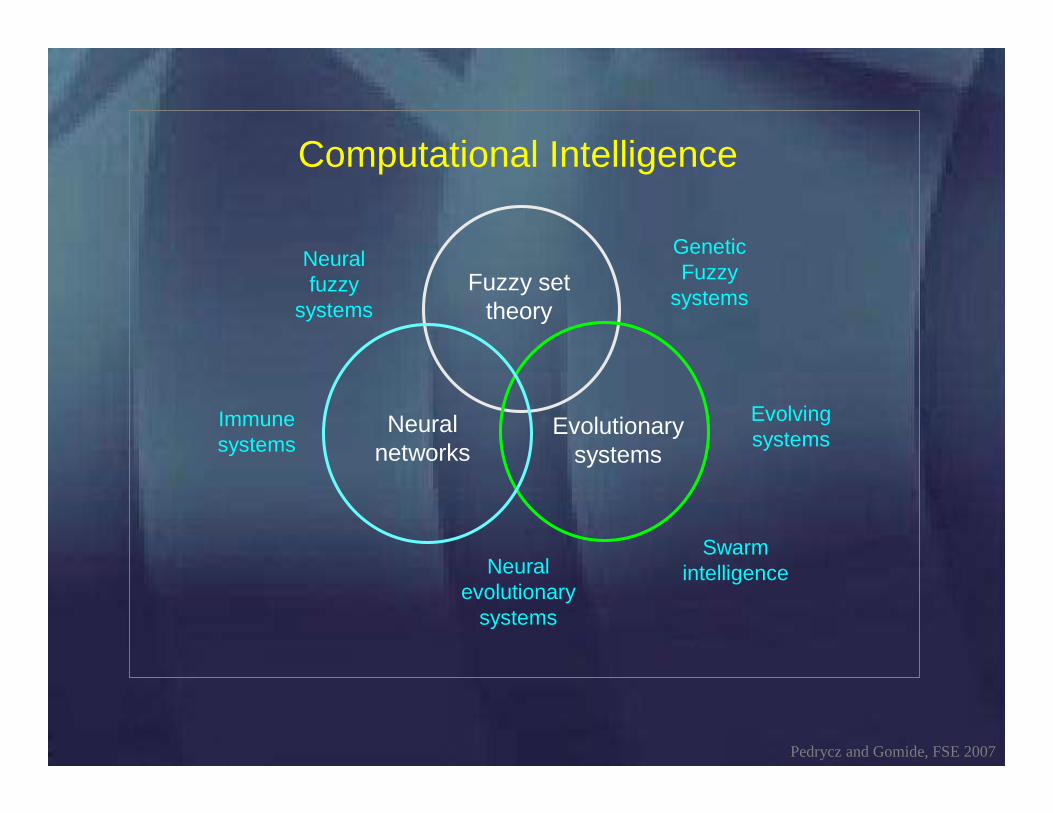
Fuzzy set theory
Neuralnetworks
Evolutionary systems
Neuralfuzzy
systems
GeneticFuzzy
systems
Neuralevolutionary
systems
Computational Intelligence
Evolvingsystems
Swarmintelligence
Immunesystems
Computational intelligence
Data processing systems with capabilities of (Bezdek, 1992/1994)
– pattern recognition– adaptive– fault tolerance– performance approximates human performance– no use of explicit knowledge
Framework to design and analyze intelligent systems (Duch, 2007)
– autonomy– learning– reasoning
Pedrycz and Gomide, FSE 2007
Pedrycz and Gomide, FSE 2007
Computing systems able to (Eberhart, 1996)
– learn– deal with new situations using
• reasoning• generalization• association• abstraction• discovering
Computational intelligence
– largely human-centered– forms of artificial and synthetic intelligence– collaboration man-machine
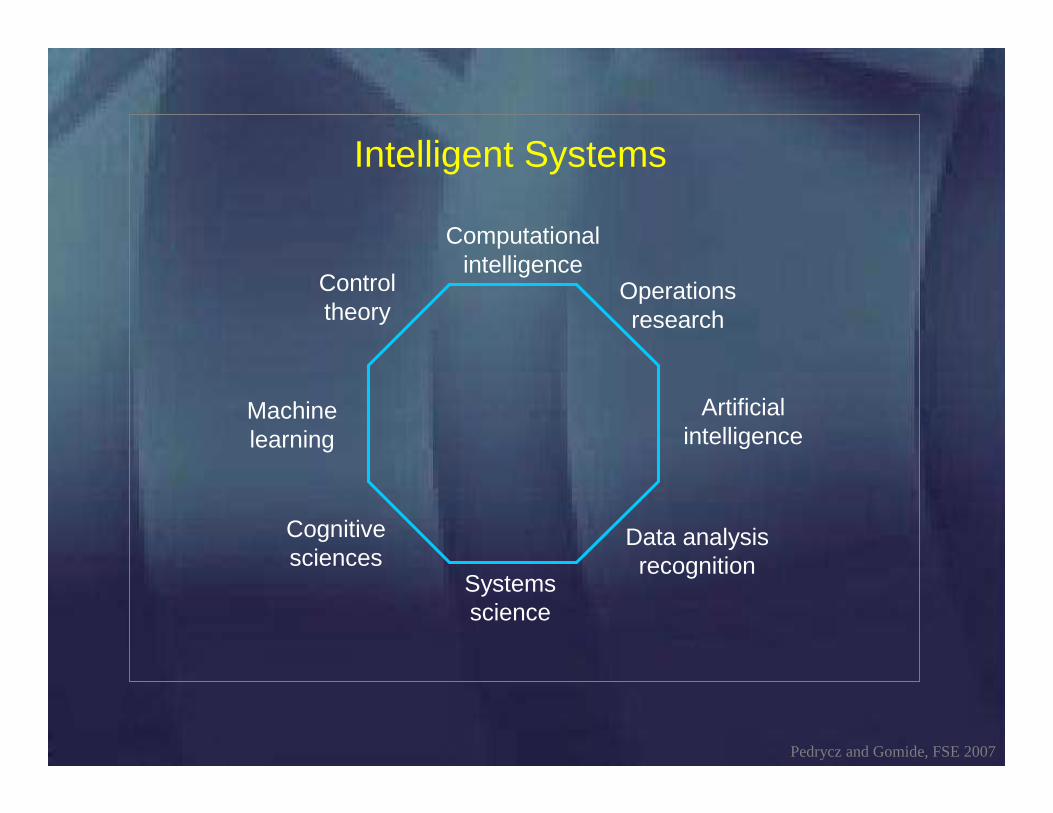
Computational intelligence
Machine learning
Artificial intelligence
Intelligent Systems
Systems science
Control theory
Cognitivesciences
Data analysis recognition
Operationsresearch
Pedrycz and Gomide, FSE 2007

13.2 Recurrent neurofuzzysystems
Pedrycz and Gomide, FSE 2007
Pedrycz and Gomide, FSE 2007
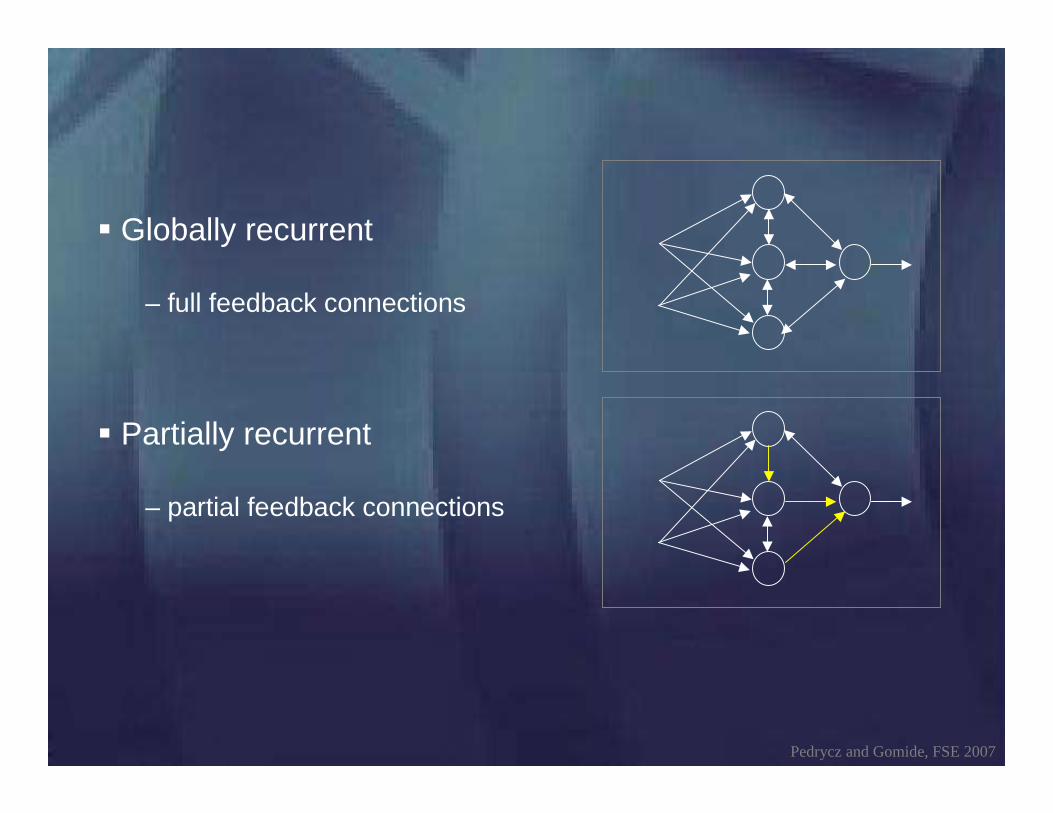
Globally recurrent
– full feedback connections
Partially recurrent
– partial feedback connections
Pedrycz and Gomide, FSE 2007
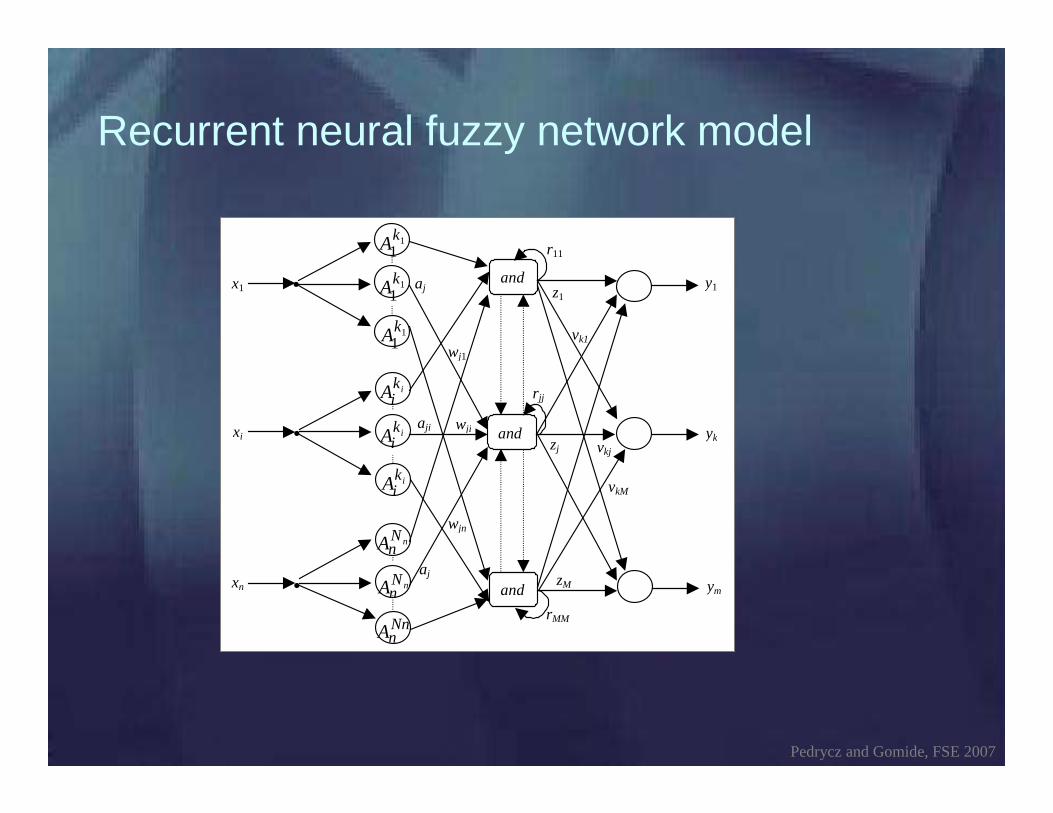
Recurrent neural fuzzy network model
• 11kA
11kA
11kA
• ikiA
ikiA
ikiA
• nNnA
nNnA
NnnA
and
and
and
x1
xi
y1
yk
ym
aj
aji
aj
wji
wjn
wj1 vk1
vkj
vkM
z1
zj
zM xn
r11
rjj
rMM
Pedrycz and Gomide, FSE 2007
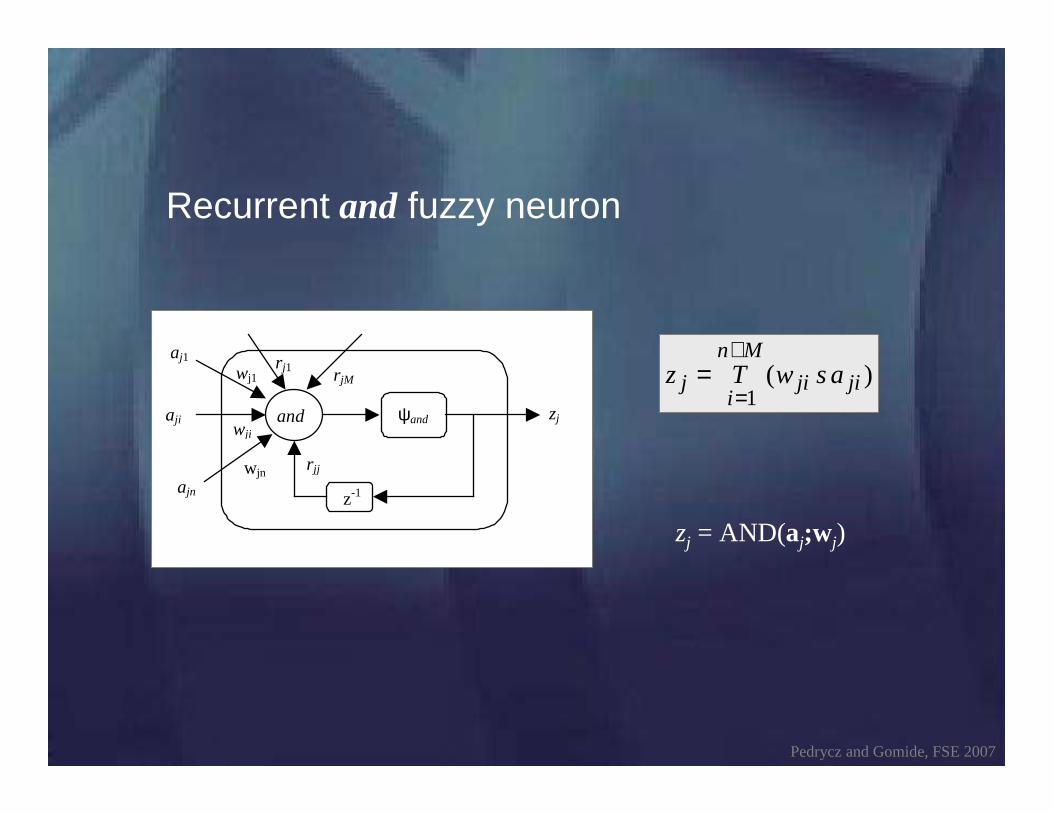
Recurrent and fuzzy neuron
zj = AND(aj;wj)
)(1
jiji
Mn
ij aswTz
+
==
and
aj1
aji
ajn
wji
wjn
wj1 rj1
rjj
ψand
z-1
rjM
zj

Pedrycz and Gomide, FSE 2007
Ni number of fuzzy sets that granulate the ith input
j indexes and neurons; given ki , j is found using
x1, ..., xi,..., xn inputs
−+= ∏∑
−
=−+
=+−
1
1)1(
2)1( )1(
i
rrn
M
iinn Nkkj
)( ikiji xAa i=
wji weight between ith input and jth and neuron
zj output of the jth and neuron
vkj weight jth input of the kth output neuron
rjl feedback connection of the lth input of the jth and neuron
yk = ψ(uk) output kth neuron of the output layer
Pedrycz and Gomide, FSE 2007
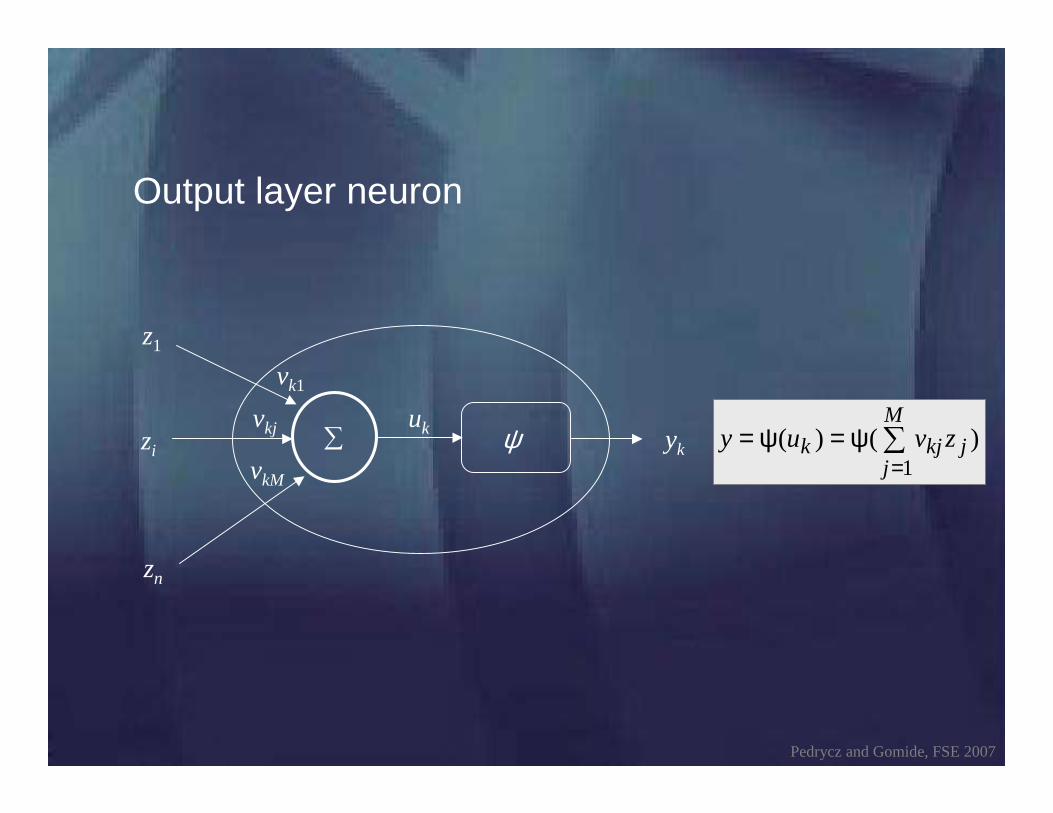
∑=
ψ=ψ=M
jjkjk zvuy
1)()(
z1
zn
zi
vk1
vkM
vkj ∑ ykψuk
Output layer neuron
Pedrycz and Gomide, FSE 2007

Learning algorithm
procedure NET-LEARNING (x, y) returns a network
input:data x, ylocal: fuzzy sets
t, s: triangular normsε: threshold
GENERATE-MEMBERSHIP-FUNCTIONSINITIALIZE-NETWORK-WEIGHTS
until stop criteria ≤ ε dochoose and input-output pair x and y of the data setACTIVE-AND-NEURONSENCODINGUPDATE-WEIGHTS
return a network
Pedrycz and Gomide, FSE 2007

Example
Chaotic NH3 laser time series data
• first 1000 samples for learning• predict next 100 steps
Pedrycz and Gomide, FSE 2007

−−− Actual ----- NFN
100 steps ahead prediction
Pedrycz and Gomide, FSE 2007
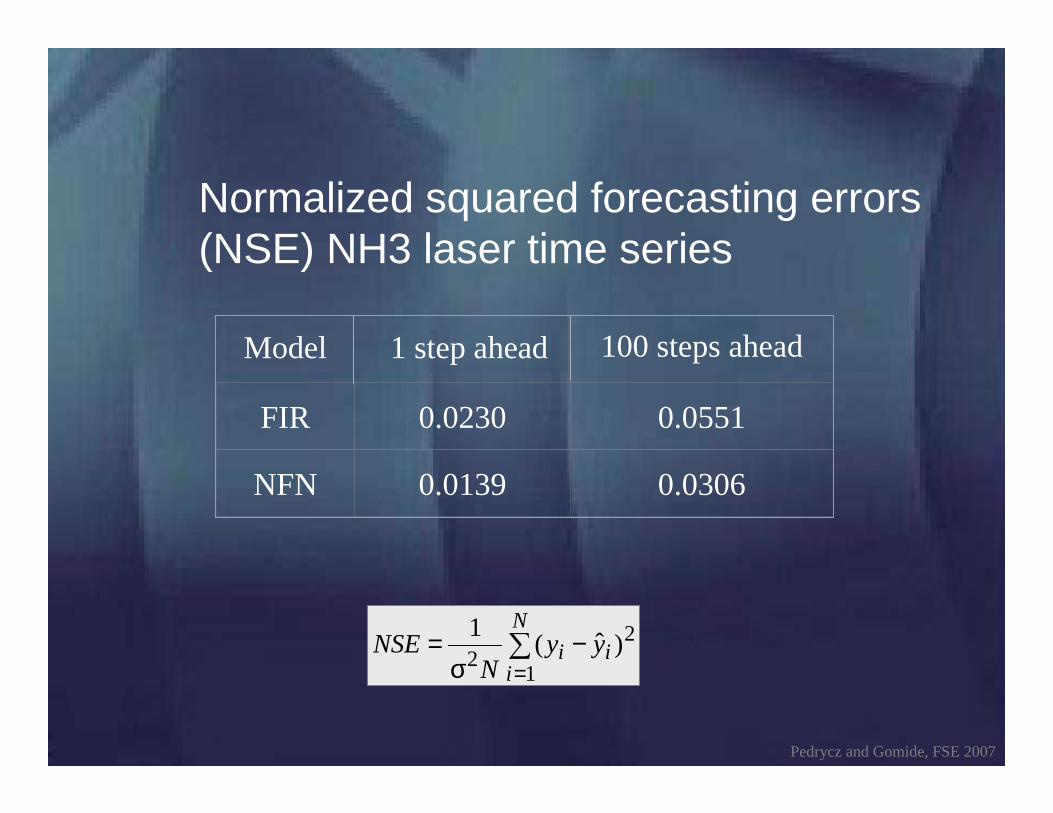
Normalized squared forecasting errors (NSE) NH3 laser time series
100 steps ahead
FIR 0.0230 0.0551
NFN 0.0139 0.0306
Model 1 step ahead
2
12
)ˆ(1
∑=
−σ
=N
iii yy
NNSE
Pedrycz and Gomide, FSE 2007

13.3 Genetic fuzzy systems
Pedrycz and Gomide, FSE 2007

Genetic fuzzy systems
GFS is an approach to design fuzzy models and systems
GFS = fuzzy system + learning using genetic algorithm
Learning of models structure and parameters
– rule base– fuzzy rules– membership functions– operators– inference procedures
Pedrycz and Gomide, FSE 2007

Genetic Fuzzy Systems
Encoder Decoder
Processing
Knowledgebase
Geneticalgorithms
Learning
Fuzzy processing
Genetic design
Pedrycz and Gomide, FSE 2007

13.4 Coevolutionary hierarchicalgenetic fuzzy system
Pedrycz and Gomide, FSE 2007

Coevolution
Considers interactions between population members
Populations hierarchically structured
Hierarchy levels associated with partial solutions of the problem
– individuals of different populations keep collaborative relations– collaboration depends on the fitness of the individuals– hierarchical levels:
• I : membership functions• II : fuzzy rules• III: rule bases• IV: fuzzy systems (models)
Pedrycz and Gomide, FSE 2007
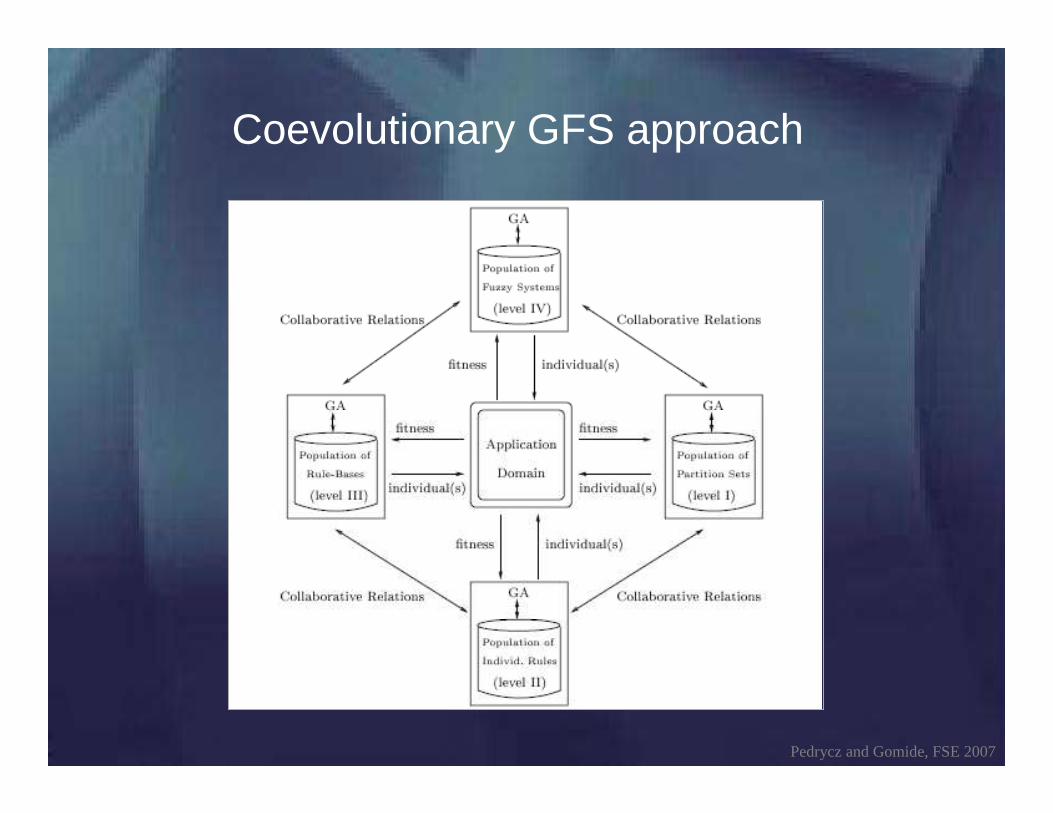
Coevolutionary GFS approach
Pedrycz and Gomide, FSE 2007

13.5 Hierarchical collaborativerelations
Pedrycz and Gomide, FSE 2007

(a)
Collaboration between species
Pedrycz and Gomide, FSE 2007

(b)
Collaboration between individuals
Rj: If x1 is A1j and ...and xn is An
j then y = g(wj,x)Pedrycz and Gomide, FSE 2007

Fitness evaluation in hierarchical collaborative evolution
Pedrycz and Gomide, FSE 2007
Example: function approximation
Rj: If x1 is A1j and ...and xn is An
j then y = g(wj,x)
and = t-norm
))(1( abbapp
abbta
tt −+−+=
pt : obtained by coevolution
g(wj,x) : least squares + pruning
Pedrycz and Gomide, FSE 2007
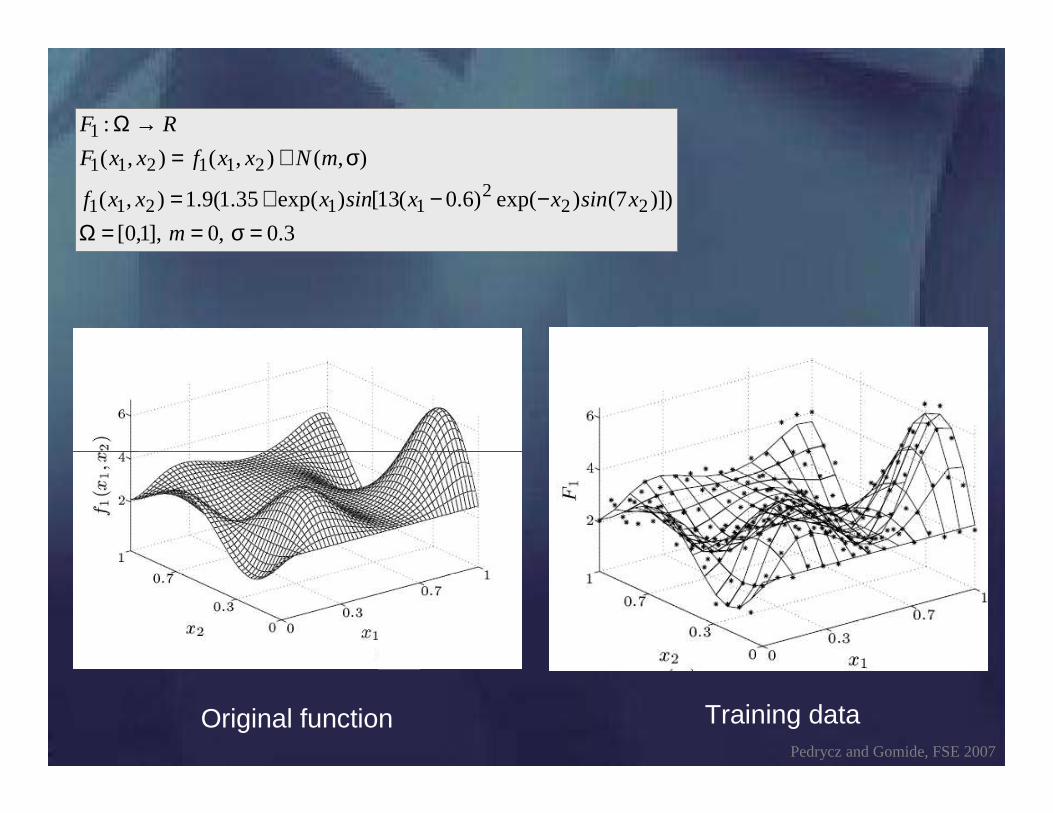
3.0,0],1,0[
)])7()exp()6.0(13[)exp(35.1(9.1),(
),(),(),(
:
222
11211
211211
1
=σ==Ω−−+=
σ+=→Ω
m
xsinxxsinxxxf
mNxxfxxF
RF
Original function Training dataPedrycz and Gomide, FSE 2007
f1
f1
Pedrycz and Gomide, FSE 2007
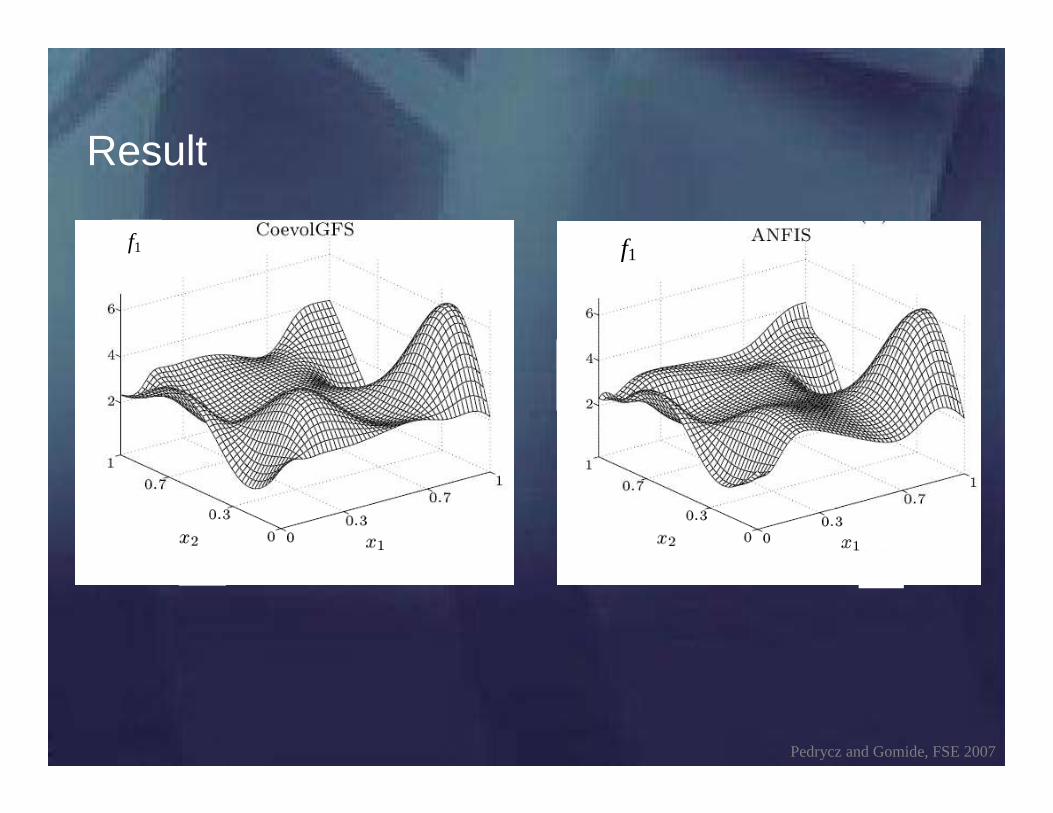
Result
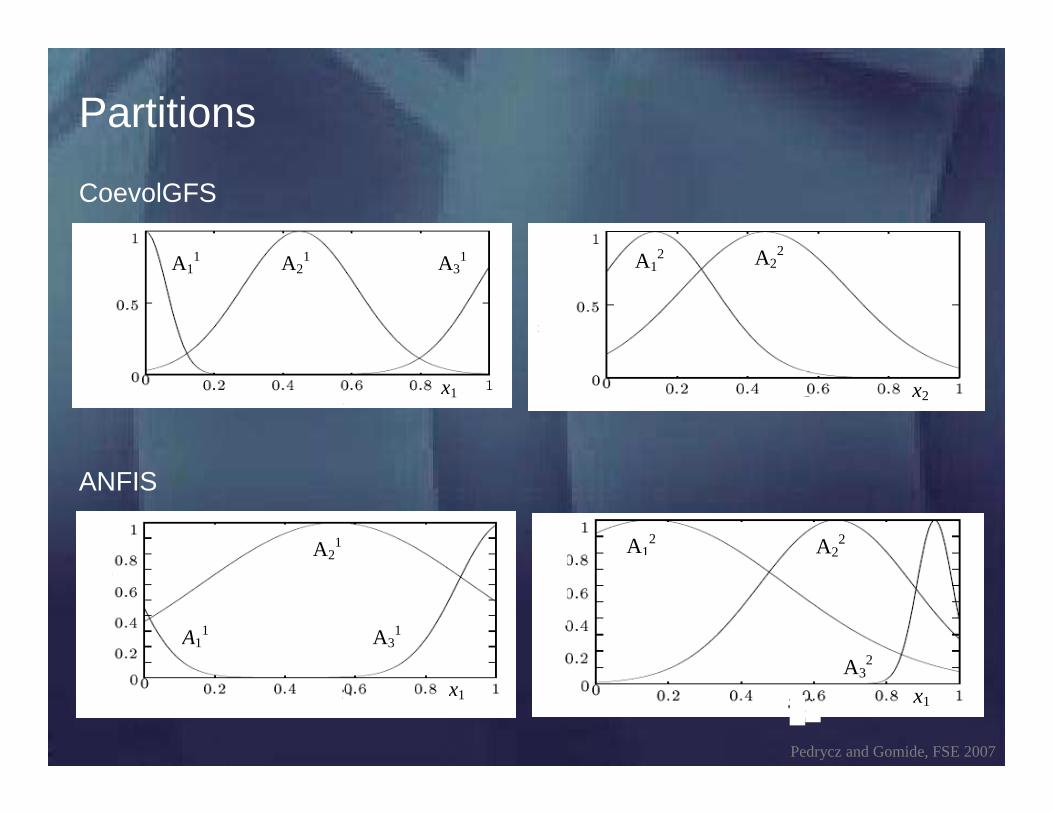
A11 A2
1 A31
x1
A12 A2
2
x2
A11
x1
A21
A31
x1
A12 A2
2
A32
Partitions
CoevolGFS
ANFIS
Pedrycz and Gomide, FSE 2007

RME for function approximation example
Approach Training RME Test RMENumber of
Rules
CoevolGFS 0.25 0.13 8
ANFIS 0.32 0.21 9
Pedrycz and Gomide, FSE 2007
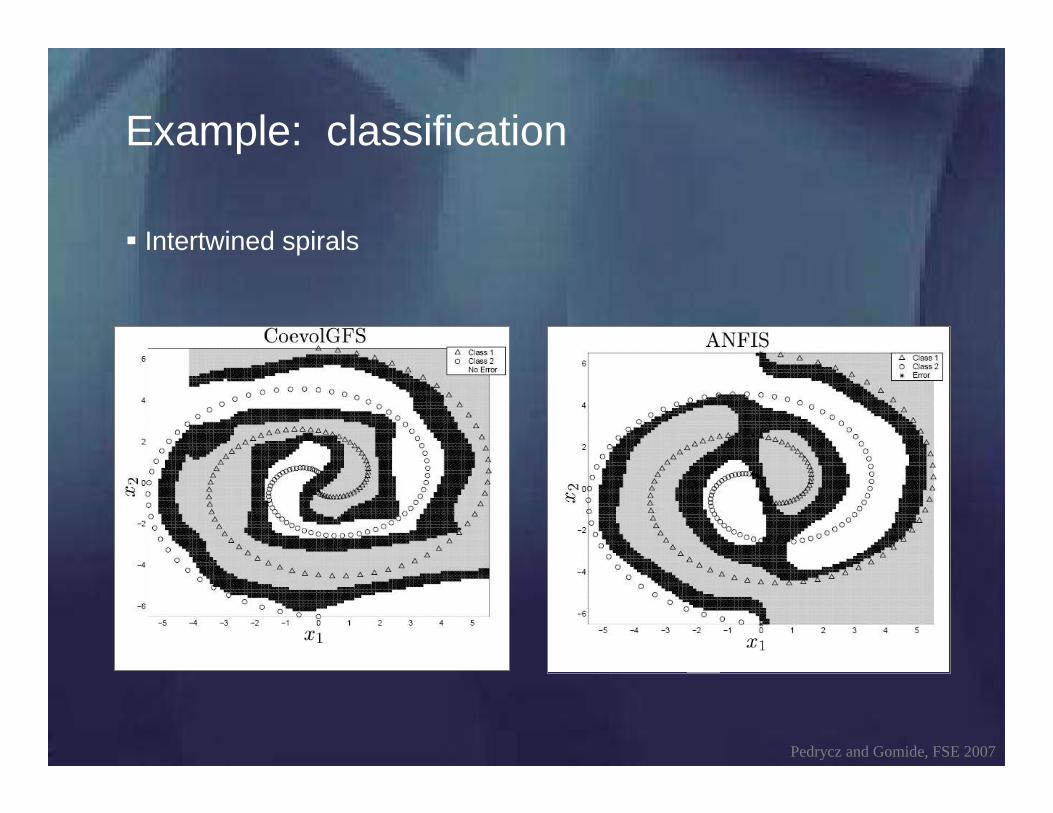
Example: classification
Intertwined spirals
Pedrycz and Gomide, FSE 2007

2122
2121212
2122
2121213
2122
2121212
2122
2121211
34.028.025.024.10.214.1thenhighishighisIf:
45.078.008.06.72.22.17thenhighsmediumisIf:
46.084.005.07.73.13.15thenlowismediumisIf:
1.017.034.026.06.131.0thenlowislowisIf:
xxxxxxyxandxR
xxxxxxyixandxR
xxxxxxyxandxR
xxxxxxyxandxR
−−−++=
+−−+−−=
−+−+−=
−++−+−=
Classification rules
Pedrycz and Gomide, FSE 2007

Approach Cycles MisclassificationNumber of
Rules
CoevolGFS 529 18 9
ANFIS 1000 0.21 9
Classification performance: Intertwined spirals
Pedrycz and Gomide, FSE 2007
Pedrycz and Gomide, FSE 2007
13.6 Evolving fuzzy systems

Evolving fuzzy systems
Evolving systems: an approach to develop adaptive fuzzy models
Evolving modeling targets nonstationary process and systems
Main properties
– inherit new knowledge– gradual changes– life-long learning– self organization of the system structure– complements GFS approach– may act online
Pedrycz and Gomide, FSE 2007
Pedrycz and Gomide, FSE 2007
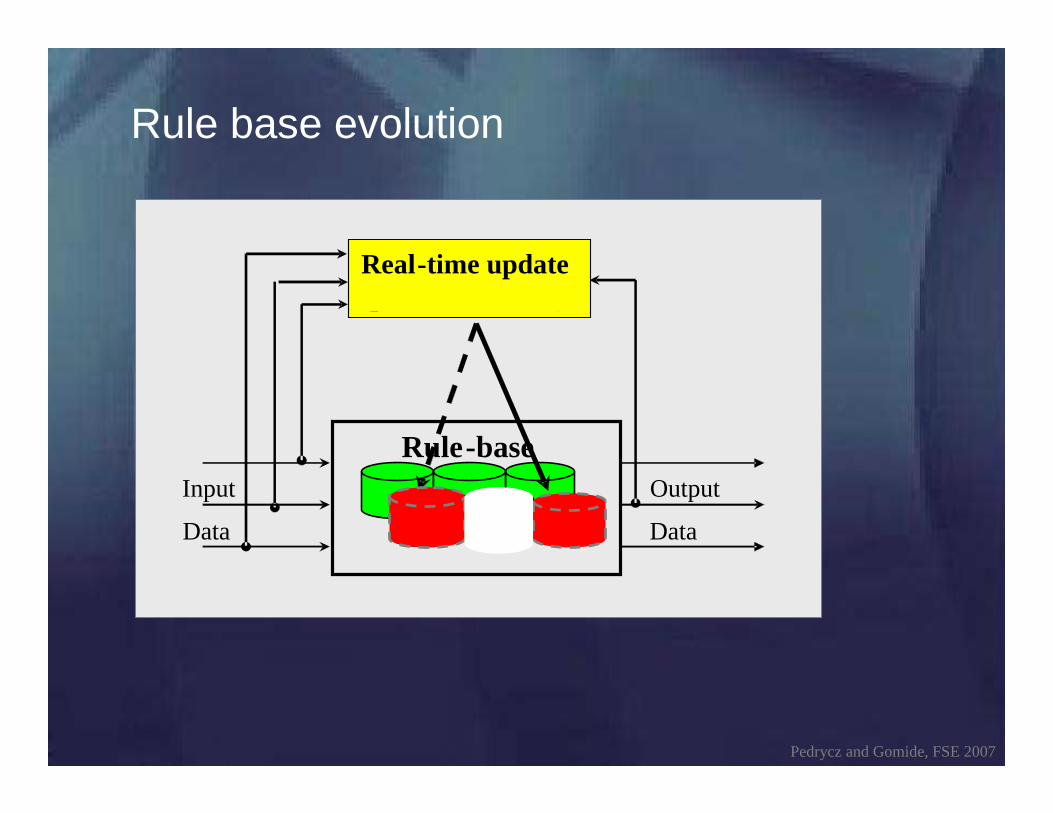
Rule base evolution
Input Output
Data Data
Real-time update (potential -based)
Rule-base

Recursive clustering
Pedrycz and Gomide, FSE 2007
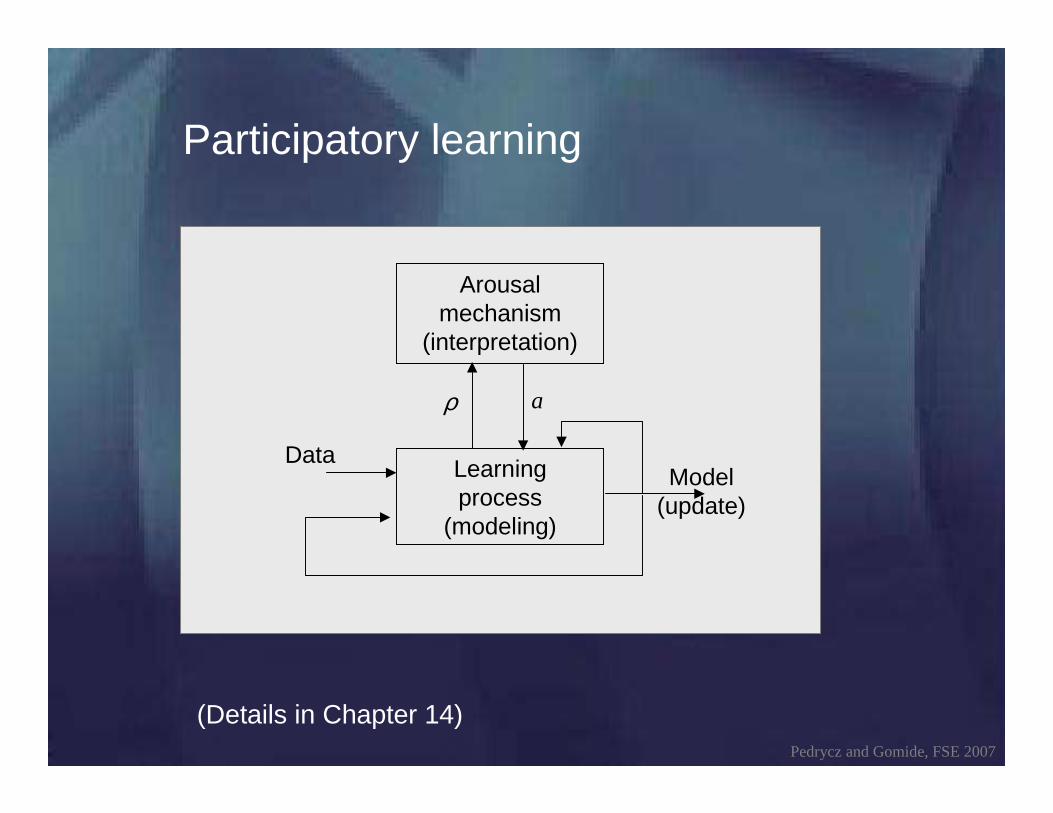
Model(update)
Learningprocess
(modeling)
Arousalmechanism
(interpretation)
Data
ρ a
Participatory learning
(Details in Chapter 14)Pedrycz and Gomide, FSE 2007
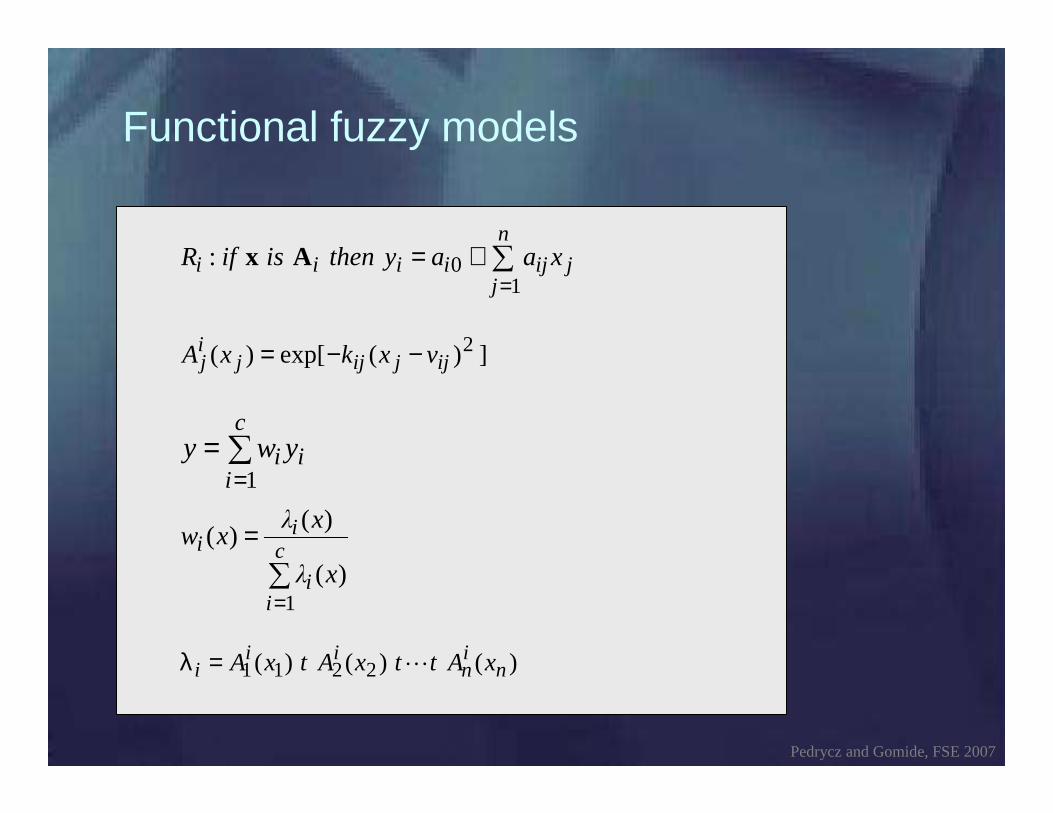
Functional fuzzy models
Pedrycz and Gomide, FSE 2007
∑=
+=n
jjijiiii xaaythenisifR
10: Ax
])(exp[)( 2ijjijj
ij vxkxA −−=
∑=
=c
iii ywy
1
∑=
=c
ii
ii
xλ
xλxw
1)(
)()(
)()()( 2211 nin
iii xAttxAtxA L=λ
Pedrycz and Gomide, FSE 2007
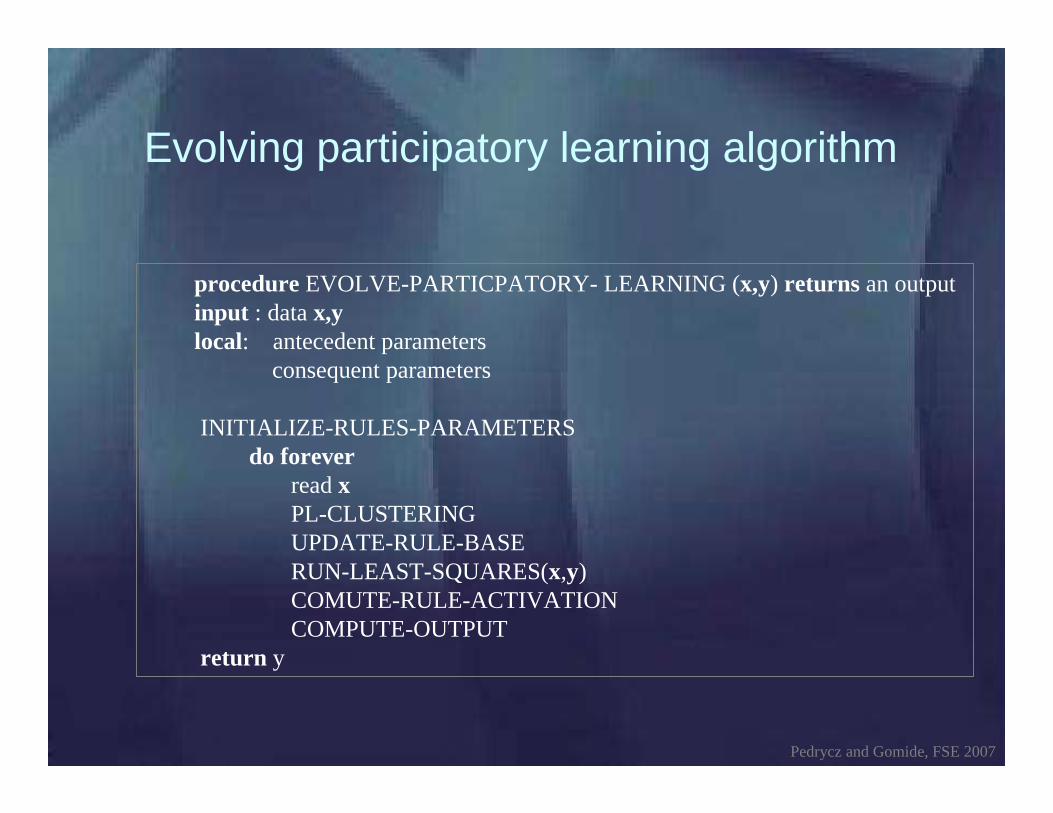
procedure EVOLVE-PARTICPATORY- LEARNING (x,y) returns an outputinput : data x,ylocal: antecedent parameters
consequent parameters
INITIALIZE-RULES-PARAMETERSdo forever
read xPL-CLUSTERINGUPDATE-RULE-BASERUN-LEAST-SQUARES(x,y)COMUTE-RULE-ACTIVATIONCOMPUTE-OUTPUT
return y
Evolving participatory learning algorithm
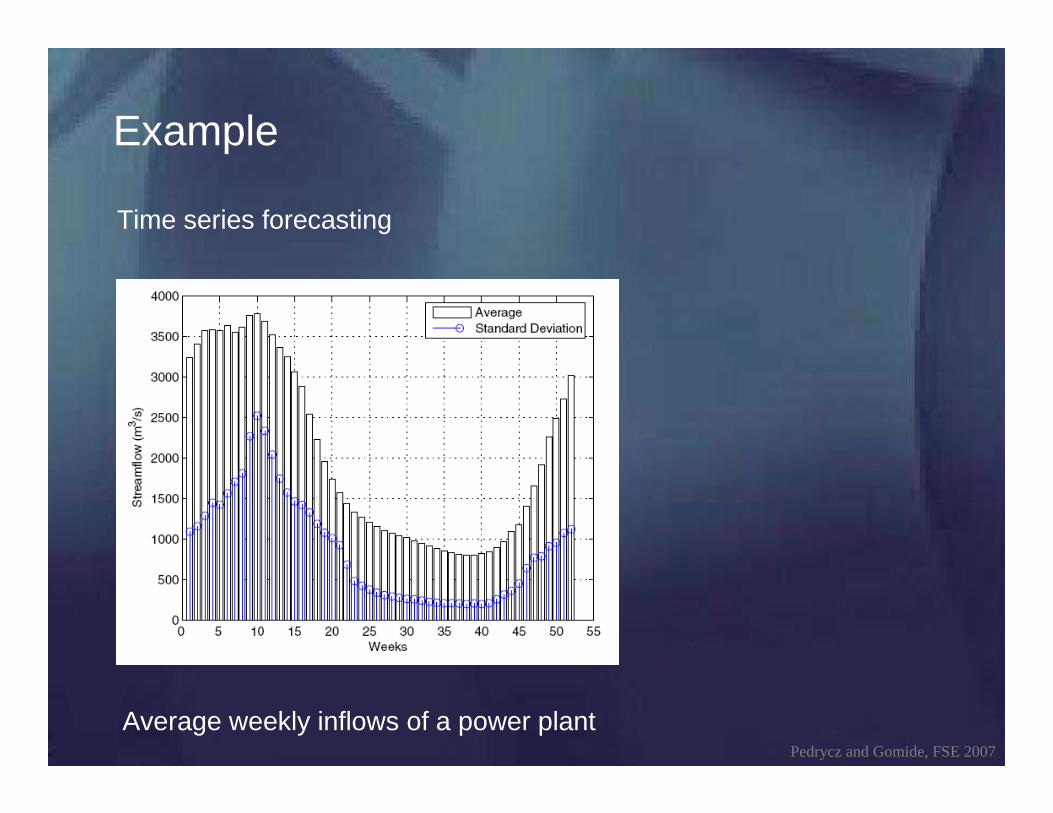
Example
Time series forecasting
Pedrycz and Gomide, FSE 2007
Average weekly inflows of a power plant

Pedrycz and Gomide, FSE 2007
Estimated partial correlation

Pedrycz and Gomide, FSE 2007
2
1)(
1∑=
−=P
k
kd
k xxP
RMSE
||1
1∑=
−=P
k
kd
k xxP
MAD
∑=
−=P
kkd
kd
k
x
xx
PMRE
1
||100
−=kd
kd
k
x
xxRE
|max100max
∑ ∑
∑
= =
=
−−
−−=ρ
P
k
P
k
kd
kd
P
k
kd
kd
xxxx
xxxx
1 1
22
1
)()(
))((
Performance measures

Pedrycz and Gomide, FSE 2007
Result

Pedrycz and Gomide, FSE 2007
ErrorModels
ePL eTS
RMSE (m3/s) 378.71 545.28
MAD (%) 240.55 356.85
MRE (%) 12.54 18.42
REmax (%) 75.51 111.22
ρ 0.95 0.89
Number of rules 2 2
Forecasting performance average weekly inflow