1 Virtual Patrol : A New Power Conservation Design for Surveillance Using Sensor Networks Prasant...
28
1 Virtual Patrol : A New Power Conservation Design for Surveillance Using Sensor Networks Prasant Mohapatra , Chao Gui Computer Science Dept. Univ. California, Davis
-
Upload
mae-bishop -
Category
Documents
-
view
213 -
download
0
Transcript of 1 Virtual Patrol : A New Power Conservation Design for Surveillance Using Sensor Networks Prasant...

1
Virtual Patrol : A New Power Conservation Design for Surveillance Using Sensor
Networks
Prasant Mohapatra , Chao Gui
Computer Science Dept.Univ. California, Davis

2
Outline
Introduction Working model
– On-demand Temporary Patrol– Coverage-oriented Continuous Patrol
Senstrol (SENSor network paTROL operations)– Patrol setup phase
Patrol setup dissemination Sleep schedule setup Patroller host handover
– Patrolling phase Performance evaluation Conclusion

3
Introduction
Surveillance is a typical application among a wide range of sensor network applications
A surveillance sensor network detects any event in the monitored field– toxic gas leak, forest fire, battle field surveillance , intr
uding personnels or vehicles

4
Introduction
Real life solutions of field surveillance– Stationary watchtowers– Patrolling sentinels– Hybrid solutions combining the two are also possible
Given a curve in the field as the desired patrol path– "virtual patrol“ can be achieved by sequentially waking up and tur
ning off sensor nodes that are located on the patrol path

5
Introduction ~Example Senstrol Scenario~
• Battle field surveillance •Soldiers hide at A•Plan arbitrary patrol path•Inject the path info. to nearest sensor•Path info. disseminated to all sensors along path•Virtual patrol carried out
A
B
On-demand Temporary
Patrol

6
Working model
Two working model– On-demand Temporary Patrol (OT-Patrol)
Can be applied to specific locations or paths
– Coverage-oriented Continuous Patrol (CC-Patrol) can also be used for covering entire field
Coverage-oriented Continuous Patrol (CC-Patrol)– sensing range of the virtual patroller can sweep
through every position in the network field

7
Working model ~ Coverage-oriented Continuous Patrol (CC-Patrol) ~
the network’s power consumption rate is much lower than the conventional surveillance operations

8
Senstrol ~key concepts~
There is an imaginary "patroller" moving along patrol path, with constant speed vp – sensor nodes near patrol path should be active when and
only when the "patroller" is within node’s duty range– duty range would be the same as sensing range

9
Senstrol ~key concepts~
only nodes within the duty range of the current VP location need to be active

10
Senstrol
A patrol is initiated by a user at the starting location– Portable computer is used to disseminate the patrol
setup information
The patrol setup information is forwarded to the node closest to the starting point – serves as the first node of the new patrol

11
Senstrol (SENSor network paTROL operations)
Patrol setup phase– Patrol setup dissemination– Sleep schedule setup– Patroller host handover
Patrolling phase

12
Senstrol ~Patrol dissemination~
The first node of new patrol (Patrol Host) has the patrol setup information (PATROL_INFO) that will be disseminated to the other involved nodes
– Path trajectory Contains the parameters for defining the specific Bezier curve
– Patrol speed vp The constant speed that the imaginary patroller uses while moving al
ong the path– Iteration period Ti
The time that the patroller takes to traverse the path from start to end– Patrol duration PD
The time that the user desires the path to be patrolled– Patroller time

13
Senstrol ~Patrol dissemination~
Imaginary reference clock: “Patroller time” At the beginning, the first node PH (Patroller host),
records zero on patroller time-stamp, maps it to its local clock
As the patroller time advances, PH will broadcast PATROL_INFO to the nearby sensors
– Time-stamps of patroller time are attached to each broadcast packet
– A receiver Ni can set up its own mapping using the packet

14
Senstrol ~Patrol dissemination~
When Ni receives packet P (PATROL_INFO) at its local time-stamp tlocal(P), P carries a patroller time-stamp t(P) – tlocal(P) = t(P) +Toffset(i)
Mapping of patroller time to the local time at node Ni

15
Senstrol ~Patrol dissemination~
PH broadcast PATROL_INFO at constant interval Tdiss Each node starts an initial sleep time of uniformly random
length in the range [0, Tslot] – Time is discretized into slots ,Tslot
At beginning of Tslot, node wakes up for a short time period Tup , turns off to sleep for the remaining time of the slot
– Default sleep schedule– Intended for the sensor nodes to be able to receive the PATROL_I
NFO packets

16
Senstrol ~Patrol dissemination~
N0N1
N2
N3
N4
N5
N6
N7
N0
N4
Tdiss
N5
N6
Dissemination Procedure:1. PH broadcast PAT_INFO packets,
constant interval (Tdiss)
2. Near-by nodes conduct default sleep
schedule ( Tslot, Tup)
3. all near-by nodes receive PAT_INFO
packet
After receiving PAT_INFO, each node calculate its own sleep schedule
Tup
Tslot

17
Senstrol ~ Sleep schedule setup ~
After receiving the PATROL_INFO packet from PH, sensor node calculate its sleep schedule
– Set up the mapping from "patroller time" and its local time– Calculate the time period during which the virtual patroller (VP)
is within its duty range– Set future sleep schedule, and the iteration period received from
PATROL_ INFO packet
Time is divided into Ti ,, for VP to traverse the path from start to end

18
Senstrol ~ Sleep schedule setup ~
Wake up period
19
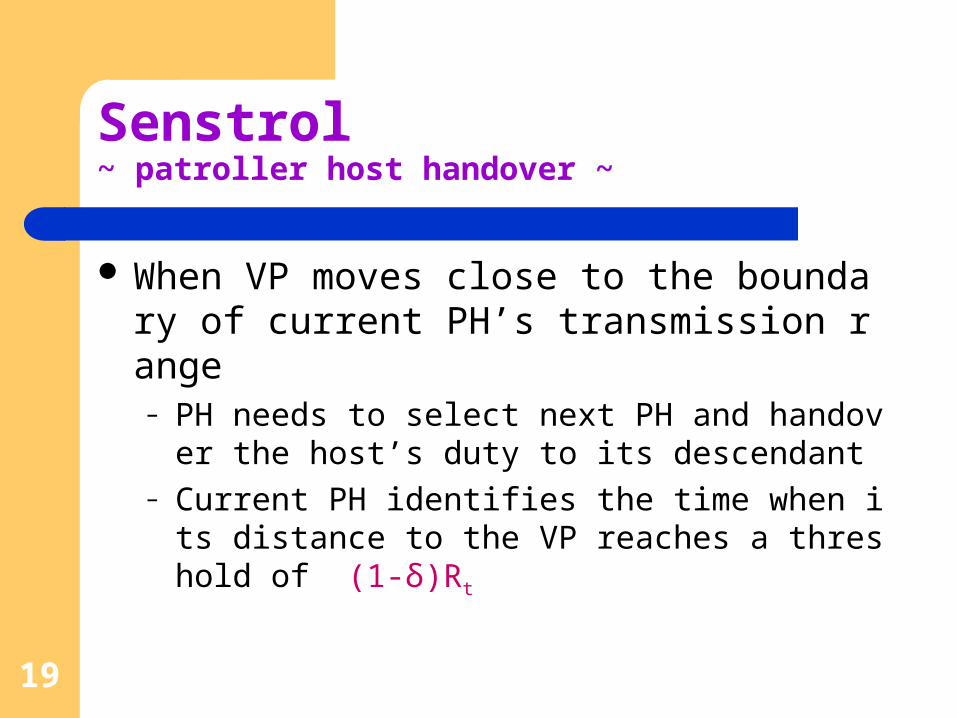
Senstrol ~ patroller host handover ~
When VP moves close to the boundary of current PH’s transmission range – PH needs to select next PH and handover the host’s dut
y to its descendant– Current PH identifies the time when its distance to the
VP reaches a threshold of (1-δ)Rt

20
Senstrol ~ patroller host handover ~
Handover procedure– the PH broadcast PH_ELECT message
– PH can wait duration Telect for returning messages
– Receiver chooses random delay in [0, Telect] , and reply to the PH
– PH sends confirm message to the selected descendant

21
Senstrol ~Patroller Host Handover~
A
D
C
E
Patroller Host
PH_ELECT messageReply messageConfirm message
Patroller Host

22
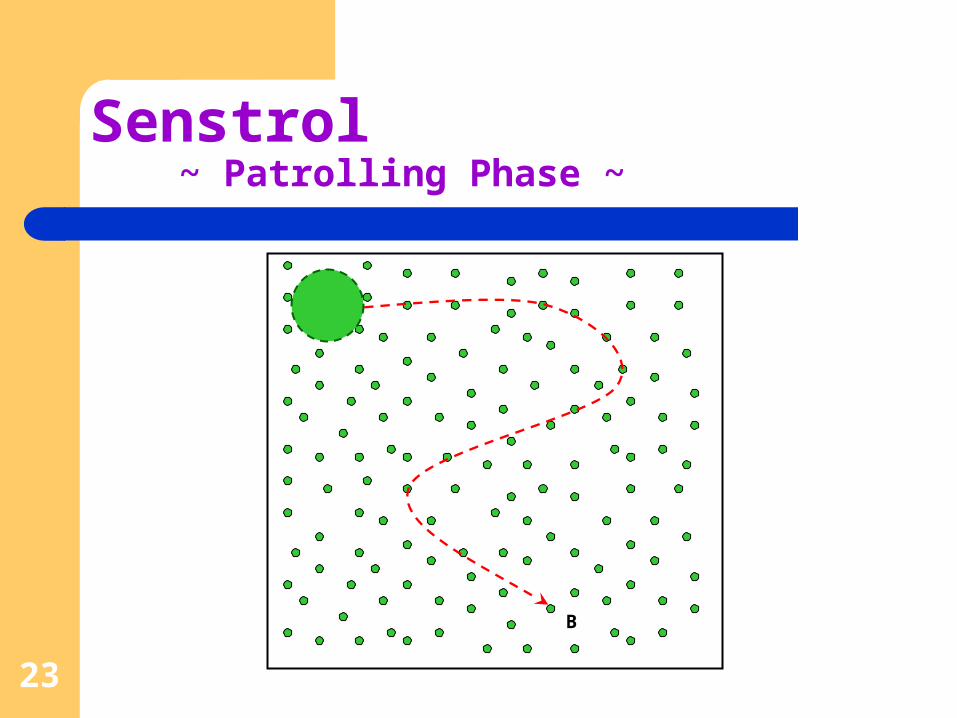
Senstrol ~ Patrolling Phase ~
Patrolling phase
23
Senstrol ~ Patrolling Phase ~
A
B

24
Performance evaluation
GloMoSim simulator 400m x 400m field 800 nodes, uniform random distribution Transmission power 10dBm (10mW) Receiving sensitivity, the lowest signal power that
may be reliably received by the receiver -65 dBm (0.3μW)
VP speed 5 m/s

25
Energy Consumption vs. Duty Range
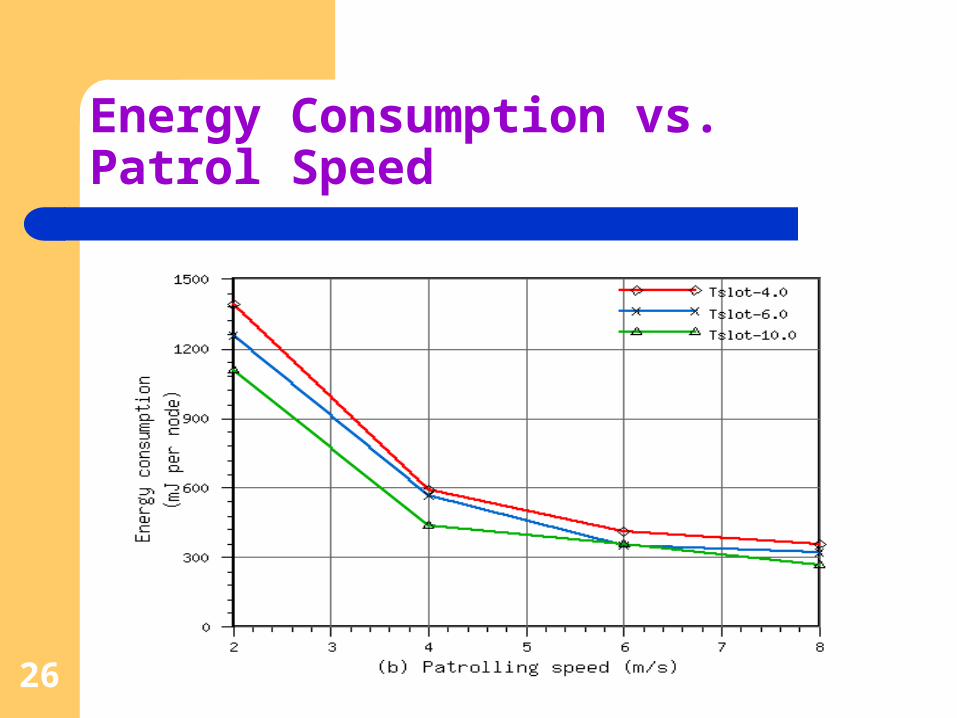
26
Energy Consumption vs. Patrol Speed

27
Energy Consumption vs. Node Density
the number of nodes
participating in the patrol
setup

28
Conclusion
Introduce Virtual Patrol operations in Surveillance Sensor Network
Two models of Virtual Patrol– On-demand Temporary patrol– Coverage-oriented Continuous patrol
Future work– extend the Senstrol to support multiple patrollers