
1 University of Pennsylvania Demonstrations Alur, Kumar, Lee, Pappas Rafael Fierro Yerang Hur Franjo...
13
1 University of Pennsylvania Demonstrations Alur, Kumar, Lee, Pappas Rafael Fierro Yerang Hur Franjo Ivancic PK Mishra
-
date post
20-Dec-2015 -
Category
Documents
-
view
214 -
download
0
Transcript of 1 University of Pennsylvania Demonstrations Alur, Kumar, Lee, Pappas Rafael Fierro Yerang Hur Franjo...

1
University of Pennsylvania
Demonstrations
University of Pennsylvania
Demonstrations
Alur, Kumar, Lee, Pappas
Rafael Fierro
Yerang Hur
Franjo Ivancic
PK Mishra

2
CHARONToolset
Analysis ToolsAnalysis Tools
AbstractionExploit hierarchy, modularitySimplified model for controller design or analysis
Reachability computationsToolboxes for reachability computationsAccurate event detection for hybrid systems
Symbolic toolbox for reachability analysis of nilpotent systems
Accurate event detection for power train and V2V controller
Abstractions and approximations for the power train
Hierarchy for the power train and V2V controller

3
Powertrain and V2V OEPsPowertrain and V2V OEPs
V2V Abstraction The input variable u(t) is the desired acceleration sent by the V2V
controller The actual throttle position and brake commands are computed
using backstepping from u(t)
Powertrain Approximation Engine has physical limitation and the vehicle cannot change its state (velocity and acceleration) instantaneously. Acceleration mode
The engine, transmission and throttle systems are approximated by a linear system in series with a saturation element
Deceleration mode The engine, transmission and braking systems are approximated by a
saturation element in series with a first-order system

4
Approximate Hybrid ModelApproximate Hybrid Model
on brake_sw if )(
offbrake_sw if )(
1
1
sin1
max
max
2
/
bU
tU
bbb
b
ttt
t
airrr
dragrrBt
usat
usat
u
uku
uku
MgvcFuM
v
FFFFMa
b
t
P P'
Approximate model for Engine and Transmission
1 sk
t
t tu
Tttt kuu maxmin
2 ,)(ˆmin
1 sk
b
b bu
Tbbb kuu maxmin
2 ,)(ˆmin

5
mode Acceleration mode Brake
= 90 = 10
= 0
= 10
= 40
= 20
= 10
Comparison: Approximate Model and OEP ModelComparison: Approximate Model and OEP Model

6
CHARON Visual EditorCHARON Visual Editor

7
CHARON Visual EditorCHARON Visual Editor

8
CHARON Visual EditorCHARON Visual Editor

9
CHARON Visual EditorCHARON Visual Editor
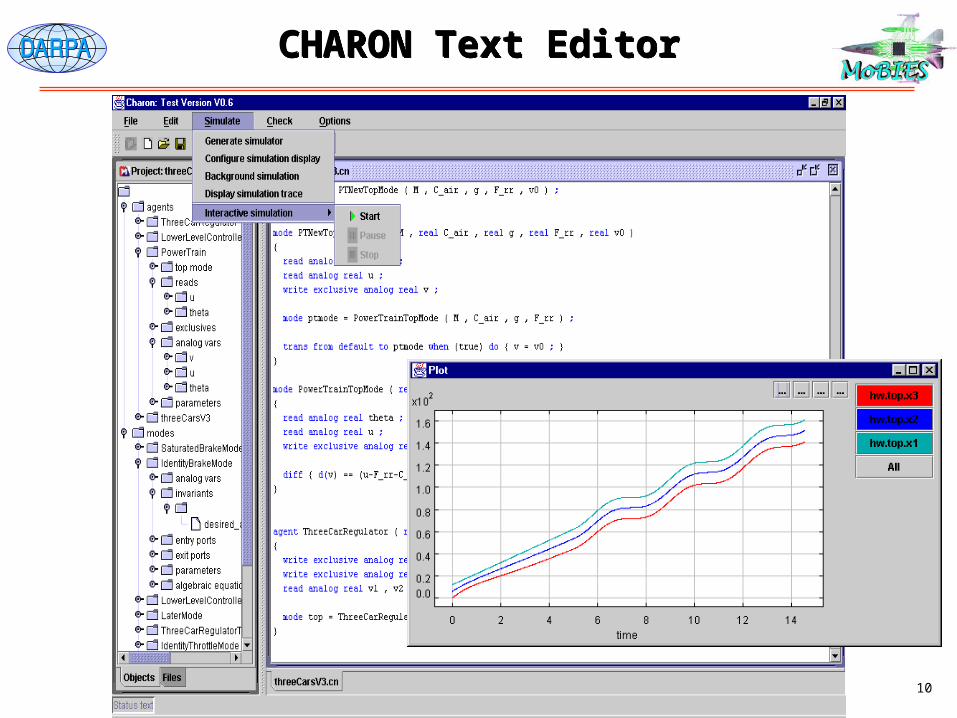
10
CHARON Text EditorCHARON Text Editor

11
Two Keys to AnalysisTwo Keys to Analysis
ModularityEfficient and accurate Integration of sub modes, agents at different time scales
Detection of Events Accurate detection of constraint violations or transitions
Applications Reachability Analysis Simulation

12
Event DetectionEvent Detection
xfx dynamics
0xgoutput
input hdk
dt
Given:
We re-parameterize time by controlling the integration step size:
dk
dtgL
dk
dt
dt
dgf
output dynamics
Using feedback linearization we select our “speed” (step-size) along the integral curves to converge to the event surface
Event !x(t)
g(x)

13
RequiemRequiem
Reachability of the system
A is nilpotent g(x, u) can be any nonlinear function
Functions Forward and Backward reachable sets for continuous and discrete
systems. Forward and Backward reachable sets for timed continuous systems. Forward and Backward reachable sets continuous systems under
invariants. Forward and Backward reachable sets for discrete systems with guards. Parametric forward and backward reachable set for continuous
systems.http://www.seas.upenn.edu/hybrid/requiem.html
0,
uxg
BuAxx


















