1 Towards the relativistic theory of precession and nutation _ S.A. Klioner Lohrmann Observatory,...
56
1 Towards the relativistic theory of precession and nutation _ S.A. Klioner Lohrmann Observatory, Dresden Technical University Problems of Modern Astrometry, Moscow, 25 October 2007
-
date post
19-Dec-2015 -
Category
Documents
-
view
217 -
download
0
Transcript of 1 Towards the relativistic theory of precession and nutation _ S.A. Klioner Lohrmann Observatory,...
1
Towards the relativistic theory of precession and nutation
_
S.A. Klioner
Lohrmann Observatory, Dresden Technical University
Problems of Modern Astrometry, Moscow, 25 October 2007

2
Relativity and Earth rotation: why to bother?
• Earth rotation is the only astronomical phenomenon
- which is observed with a high accuracy
and
- which has no consistent relativistic model
• Modern theories of precession/nutation (IAU2000) are based on purely Newtonian theories with geodetic precession and nutation added in an inconsistent way
• Modern theories of rigid Earth nutation are intended to attain formal accuracy of 1 as

3
Relativity and Earth rotation: one more reason
• The main relativistic effects are significantly larger:
• 0.019 per year from geodetic precession (310-4 of general precession)• 200 as from geodetic nutation• 1–50 as from relativistic torques (different authors give different estimates)
• Geodynamical observations give important tests of General Relativity
The best estimates of the PPN using large range of angular distances from the Sun
comes from geodetic VLBI data: (Eubanks, et al. 1998)
61 ( 154 280) 10g -- = - ± ×

4
Main goal of the project
• Derivation of a new consistent and improved precession/nutation series for a rigidly rotating multipole model of the Earth in the post-Newtonian approximation of general relativity
• using post-Newtonian definitions of :
- potential coefficients
- moment of inertia tensor
• dynamical equations in the GCRS • correct relativistic time scales
• rigorous treatment of the geodetic precession and nutation

5
Relativistic post-Newtonian theory
The Earth rotates, but relative to what?

6
Post-Newtonian theory: kinematics
• Two answer are possible in relativity:
the stellar compass the inertial compass

7
In Newtonian physics this are only two ways to get to the same absolute space:
M. C. Escher
Cubic space division, 1952

8
Post-Newtonian theory: orientation of the BCRS
• It is assumed that our global reference system, BCRS, does not rotate with respect to remote quasars.
• This is a cosmological assumption to be verified by dynamical observations
• This is also an idealization: source structure is not negligible

9
• IAU (1991): … the orientation of the reference systems be chosen so that it shows no rotation with respect to distant celestial objects…
• No rotational matrix in the transformation between BCRS and GCRS
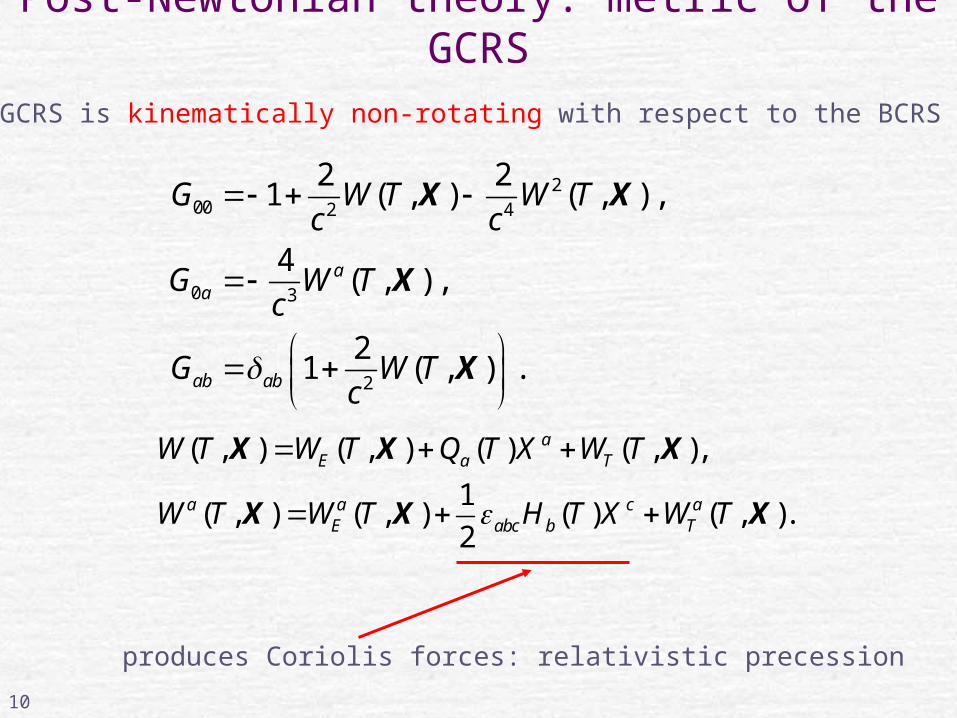
Post-Newtonian theory: orientation of the GCRS
• The GCRS is kinematically non-rotating with respect to the BCRS
10
Post-Newtonian theory: metric of the GCRS• The GCRS is kinematically non-rotating with respect to the BCRS
200 2 4
0 3
2
2 21 ( , ) ( , ) ,
4( , ) ,
21 ( , ) .
aa
ab ab
G W T W Tc c
G W Tc
G W Tc
X X
X
X
( , ) ( , ) ( ) ( , ),
1( , ) ( , ) ( ) ( , ).
2
aE a T
a a c aE abc b T
W T W T Q T X W T
W T W T H T X W T
X X X
X X X
produces Coriolis forces: relativistic precession

11
Post-Newtonian theory: relativistic precession• The GCRS is kinematically non-rotating with respect to the BCRS
( , ) ( , ) ( ) ( , ),
1( , ) ( , ) ( ) ( , ).
2
aE a T
a a c aE abc b T
W T W T Q T X W T
W T W T H T X W T
X X X
X X X
produces Coriolis forces: relativistic precession
geodetic precessionLense-Thirring precession
Thomas precession

12
Relativistic precession: experimental status
• Gravity Probe B
the longest lasting experiment in modern history (1959-2008?)
launched 20 April 2004
6.6 ’’/yr
42 mas/yr
Frame dragging
Geodetic prec.
L (orbital)
J (Earth)
IM Peg
gyro
Francis Everitt
No results yet…

13
Relativistic precession: experimental status
• LLR: geodetic precession <1% (Newhall et al., 1996; … )
• SLR: Lense-Thirring precession 2-10% ??? (Ciufolini, Pavlis, 2004)
• VLBI & Earth rotation: geodetic precession 30% (Krasinsky, 2006)
14
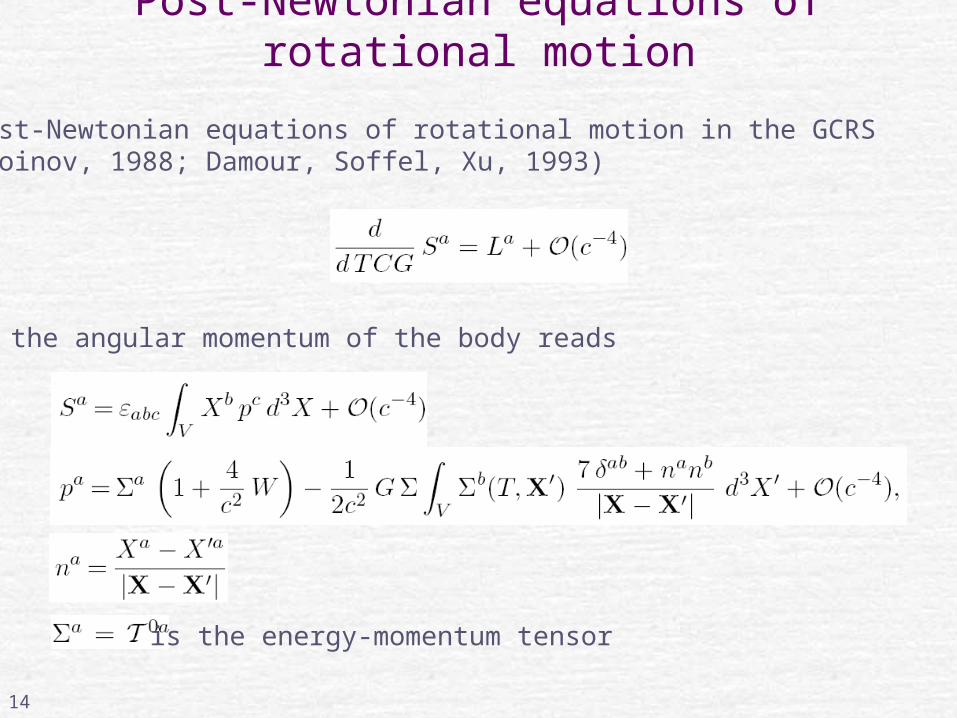
Post-Newtonian equations of rotational motion
- Post-Newtonian equations of rotational motion in the GCRS (Voinov, 1988; Damour, Soffel, Xu, 1993)
- the angular momentum of the body reads
is the energy-momentum tensor

15
Post-Newtonian equations of rotational motion
- Post-Newtonian equations of rotational motion in the GCRS (Voinov, 1988; Damour, Soffel, Xu, 1993)
- the torque
- ML and SL are the Blanchet-Damour multipole moments of the body
1610a
a
S
S-< Þ
%- simplification of the torque can be neglected
- GL and HL for l>2 are the gravitoelectric and gravitomagnetic
tidal moments

16
Further simplifications of the torque
- Mass dipole Ma vanishes in the GCRS
- SL for l>1 can be neglected at the level of 0.1 as
0aM

17
Further simplifications of the torque
- All external bodies are assumed to be mass monopoles
Newtonian term

18
Post-Newtonian equations of rotational motion
- Post-Newtonian equations of rotational motion in the GCRS (Voinov, 1988; Damour, Soffel, Xu, 1993)
- The gravitomagnetic tidal moment Ha defines the Coriolis forces:
geodetic precessionLense-Thirring precession
Thomas precession

19
Post-Newtonian angular velocity?
• We have spin S a …
• What is about angular velocity???

20
Newtonian physics: non-rigid body
• One introduces some rigidly rotating reference system
1. Principal axes of inertia
one borrows the definition of the tensor of inertia from the rigid-body theory
( ) diag( ( ), ( ), ( ))ijC t A t B t C t=
( )i ij jx P t x= and the matrix is selected in such a way that the body can be considered “at rest on the average” in the rotating coordinates.
ijP
( )2 3( , )ij ij i j
V
C t x x d xr dº +ò x x
condition
defines the angular velocity and matrix iw ijP

21
Newtonian physics: non-rigid body
3( , )i j kijk
V
S t x x d xr eº ò x &
2. Tisserand axes
“angular momentum relative to the rotating coordinates” (no immediate physical meaning
the same functional form as the conserved spin in inertial coordinates)
0iS =condition defines the Tisserand axes and the correspondingijP
taking the angular velocity corresponding to that one hasijPiw
( )2 3
,
( , )
i ij j
ij ij i j
V
S C
C t x x d x
w
r d
=
= +ò x x

22
Post-Newtonian Tisserand axes
Both
- restricted rigid body models of Thorne & Gürsel, 1983- post-Newtonian Tisserand axes of Klioner, 1996
give the same equation:
- the post-Newtonian tensor of inertia has a definition as an integral over the volume of the body
- but that definition plays no role for practical work:
exactly as multipole moments of the Earth, the numerical value of the tensor of inertia
is determined from observations

23
Rigidly rotating multipoles
• Klioner, Soffel, Xu, Wu, 2001 (based on many previous results):
- Post-Newtonian equations of rotational motion in the GCRS
- Rigidly rotating multipoles:
several assumptions on the multipole moments and the tensor of inertia

24
STF approach to compute the torque
1. For any STF tensor:
2l +1 real numbersSTF basis
2. For the multipole moments of the Earth: ˆl
lm lmL L
m l
M M Y=-
= å
ˆl
lm lmL L
m l
T T Y=-
= å
equivalent to the 2l +1 harmonic coefficients
3. For the tidal moments: ˆl
lm lmL L
m l
G G Y=-
= åfunctions of the ephemeris data
25
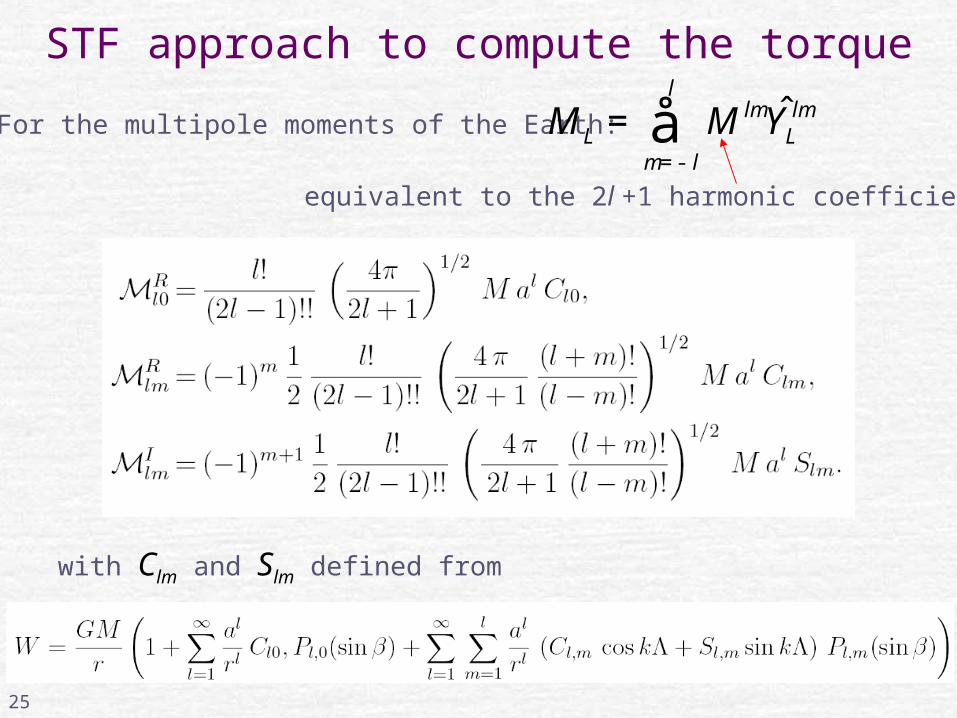
STF approach to compute the torque
2. For the multipole moments of the Earth: ˆl
lm lmL L
m l
M M Y=-
= åequivalent to the 2l +1 harmonic coefficients
with Clm and Slm defined from
26
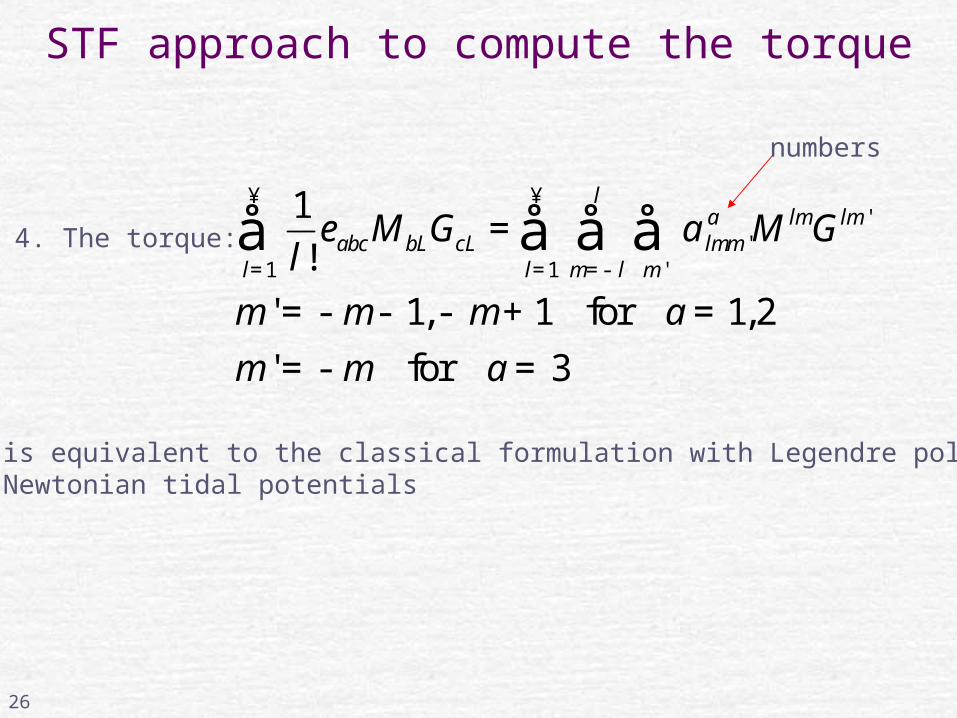
STF approach to compute the torque
''
1 1 '
1
!
' 1, 1 for 1,2
' for 3
la lm lm
abc bL cL lmml l m l m
M G M Gl
m m m a
m m a
e a¥ ¥
= = =-
=
=- - - + =
=- =
å å å å4. The torque:
numbers
5. This is equivalent to the classical formulation with Legendre polynomials for Newtonian tidal potentials

27
STF approach to compute the torque
4. The torque:

28
Legendre polynomials vs. STF tensors for the Newtonian torque
as
years from J2000

29
Numerical integration
• Fortran 95 code, about 15000 lines
• careful coding to avoid • numerical instabilities and • excessive round-off errors
• two numerical integrators: ODEX and ABM with dense output
• automatic accuracy check: forth and back integrations
• tuneable arithmetic: 64 bit, 80 bit, 128 bit
(availability is hardware- and compiler-dependent)
• FMlib: arbitrary-precision arithmetic for precision-critical operations
• STF code was automatically generated by Mathematica
• baseline:
80 bit on Intel architecture gives errors <0.001 as for 150 years
30
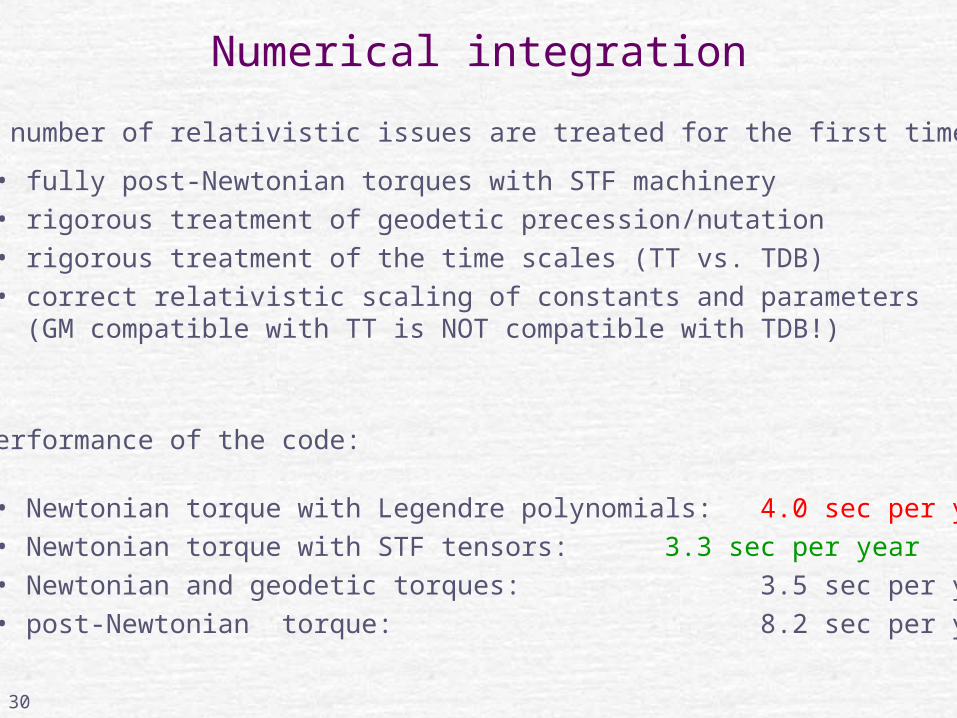
Numerical integration
• A number of relativistic issues are treated for the first time
• fully post-Newtonian torques with STF machinery• rigorous treatment of geodetic precession/nutation • rigorous treatment of the time scales (TT vs. TDB)• correct relativistic scaling of constants and parameters (GM compatible with TT is NOT compatible with TDB!)
• Performance of the code:
• Newtonian torque with Legendre polynomials: 4.0 sec per year• Newtonian torque with STF tensors: 3.3 sec per year • Newtonian and geodetic torques: 3.5 sec per year• post-Newtonian torque: 8.2 sec per year

31
Definition of the Euler angles
• Two main reference systems:
xyz in the BCRS is defined by the ecliptic and the equinox J2000:
- terrestrial system:
( ) ( ) ( ) ( ) ( )z x zR R R xyzxhz j w y=
( ) (23 26'21.40928") ( 0.05294") ( 403)x zBCRSxyz R R DE= -o
( ) ( ) ( )GCRS BCRS
xyz xyz xyzº «

32
Newtonian test bed: SMART97
• Bretagnon, Rocher, Simon, Francou, 1996-1997
• analytical theory of precession/nutation for rigid Earth
• detailed comparisons with numerical integrations
• Published series of SMART97: formal accuracy of 2 as
• Jean Louis Simon has provided the authors with the unpublished full version of SMART97:
about 70000 Poisson terms for each of the three angles
formal accuracy 0.01 as

33
Differences between our integration and SMART97: 50 days
years from J2000
as

34
Differences between our integration and SMART97: 55 years
years from J2000
as

35
Differences between our integration and SMART97: 150 years
years from J2000
as

36
Comparison with Bretagnon’s results
JD
• Bretagnon, Francou, Rocher, Simon, 1997: SMART97-numerical integration

37
Effects of the post-Newtonian torque
as
years from J2000

38
Effects of the post-Newtonian torque
as
years from J2000
2 30.46 1.493 0.008 0.00001
0.50 1.561
t t t
t
j
y
D =- - + -
D =+ +

39
Effects of the post-Newtonian torque
as
years from J2000

40
Geodetic precession as a Coriolis torque
1. Geodetic precession is added to the torque:
2. Initial conditions of the numerical integration are changed tocorrect for the geodetic precession/nutation
3. The results are subtracted from the numerical solution correspondingto the dynamical version of SMART97
4. The published analytical solution for the geodetic precession/nutation was used to subtract the “known geodetic precession/nutation” from the result: 72 terms for
102 terms for 61 terms for
The results show the errors in our current models for geodetical p/n

41
Geodetic precession as a Coriolis torque
as
years from J2000

42
Geodetic precession as a Coriolis torque
as
years from J2000
detrended

43
Geodetic precession as a Coriolis torque
as
Known analytical solutions for geodetic precession/nutation are only valid if the kinematical and dynamical angles are defined with respect to the same plane in the BCRS.
This is however not true in practice and gets basically the same
geodetic precession/nutation terms as .
The approximate integral still holds:
cos constj y w+ =W»&&

44
Geodetic precession as a Coriolis torque
as
years from J2000
It is NOT sufficient just to add the geodetic precession/nutation:
The frequencies of the Newtonian solution must be also correctedfor geodetic precession/nutation!

45
Next steps
• Clarify the meaning of the initial conditions in the relativistic context:
a mixture of dynamically and kinematically non-rotating GCRSis used in SMART97 and IAU2000
• The clarification of the initial conditions implies clear relativistic definitions of all involved planes and points, e.g.
a clear relativistic definition of ecliptic or “image of the ecliptic”in the GCRS
• Relativistically meaningful values of the constants (related to the first two):
• the moments of inertia A, B, C
• the longitude of the principal axes of inertia in the terrestrial system

46
Non-rigid Earth
• Violate the assumptions of the model of rigidly rotating multipoles the one by one and check what is important
• No way to proceed with the idea of “transfer functions” in relativity
• Generalize the approach of “extended SOS theory” into the post-Newtonian approximation of general relativity
(e.g. Krasinsky, 2006;
Getino, et al. 1991 - )

47
Backup slides

48
Newtonian physics: rigid body
• Arbitrary motion of a rigid body with a fixed point is a rotation around that
fixed point described by an orthogonal matrix Pij(t) . Consequences:
• Velocity distribution within a rigid body:
,
1
2
i j kijk
i mj mkijk
x x
P P
e w
w e
=
=
&
&
• A reference system where the body is at rest:
( )i ij jx P t x=

49
Newtonian physics: rigid body
• Total angular momentum (spin) of the body is defined as
3( , )i j kijk
V
S t x x d xr e=ò x &
• Physical merit of this definition: for an isolated body
constiS =
• From the distribution of the velocity inside the bodyix&
( )2 3
,
( , )
i ij j
ij ij i j
V
S C
C t x x d x
w
r d
=
= +ò x x
• is the Newtonian tensor of inertiaijC

50
Newtonian theory: equations of rotational motion
• Newtonian equations of rotational motion read
( )0
1
!i ij j
iab aL bLl
d dS C M G
dt dt lw e
¥
=
= = å• L is a multi-index:
1 2 lL i i i= K
• are the multipole moments of the gravitational field of the bodyLM
1 2
ext
( )
( , )l
E
l
L ii i
t
G U tx x x
=
¶=
¶ ¶ ¶x x
xK
• are the moments of the external gravitational potential at the “geocenter”
LG
1 20
( 1) 1
! l
l l
E L ii il
U G Ml x x x
¥
=
- ¶=
¶ ¶ ¶å xK

51
Relativistic formulation
- Post-Newtonian torque from “geodetic” precession
- Post-Newtonian tidal moments from point masses
• machinery of STF tensors
• in the Newtonian limit equivalent to the Legendre polynomials

52
Relativistic formulation - Post-Newtonian tidal moments from point masses (some notations)

53
Why and are so similar?
• For an axially symmetric “Earth” one has: cos constj y w+ =W=&&
years from J2000
( )tW - W
For triaxial Earth:
as per day
121.3 10W» ´

54
Why and are so similar?
• Numerical integration and SMART give very similar 'sW
years from J2000
num smartW - Was per day
121.3 10W» ´

55
Why and are so similar?
• Numerical integration and SMART give very similar 'sW
cos cosnum num smart smartj y w j y w+ » +& && &
( ) cosnum smart num smartj j y y w- » - -& && &
( ) cosnum smart num smartj j y y w- » - -

56
Why and are so similar?
( )( ) cosnum smart num smart numj j y y w- + - =Q
years from J2000
( )tQdetrendedas