
1 Scheduling Mapping of tasks to time slots Computation Communication Mapping of power usage to...
13
1 Scheduling Mapping of tasks to time slots Computation Communication Mapping of power usage to time slots Mechanical devices Thermal subsystems Other electronics subsystems Constraints Real-time deadlines, periods, min/max separation Power budget, power surge (min/max) Potentially scenario-driven
-
date post
20-Dec-2015 -
Category
Documents
-
view
214 -
download
0
Transcript of 1 Scheduling Mapping of tasks to time slots Computation Communication Mapping of power usage to...

1
Scheduling
Mapping of tasks to time slots Computation Communication
Mapping of power usage to time slots Mechanical devices Thermal subsystems Other electronics subsystems
Constraints Real-time deadlines, periods, min/max separation Power budget, power surge (min/max) Potentially scenario-driven
2
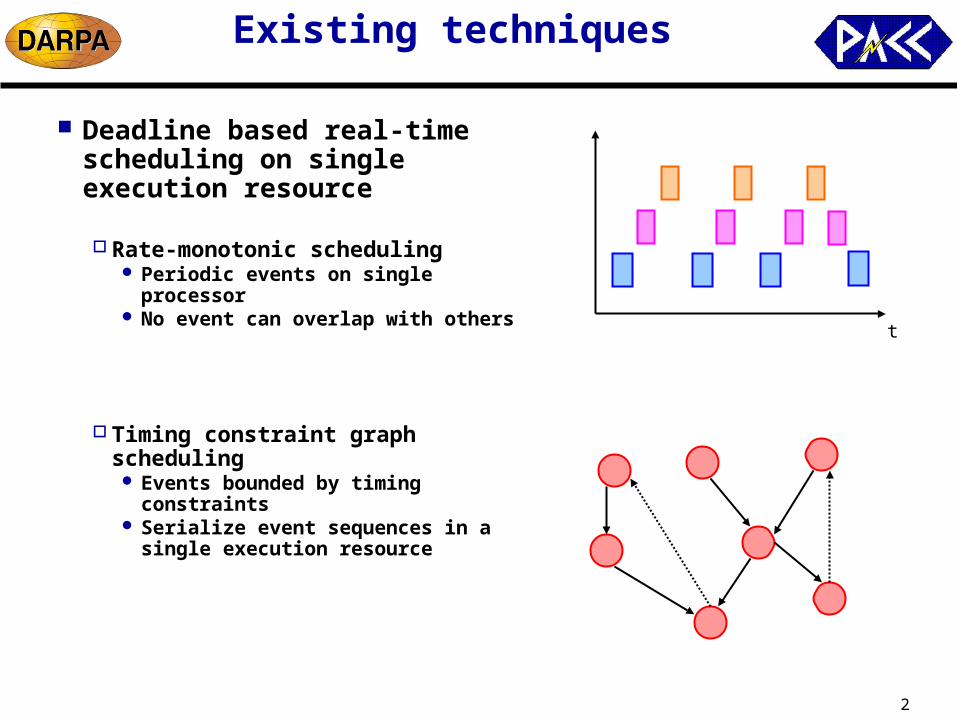
Existing techniques
Deadline based real-time scheduling on single execution resource
Rate-monotonic scheduling Periodic events on single processor No event can overlap with others
Timing constraint graph scheduling Events bounded by timing constraints Serialize event sequences in a single
execution resource
t

3
Challenges
Schedule events on multiple execution resources
Rate-monotonic scheduling Events on multiple resources with
dependencies across resources Event on different resources can overlap
Timing constraint graph scheduling Multiple resources to execute events Timing constraints across different
resources Multiple serializable execution paths on
execution resources
t
Resource A
Resource B
Resource A Resource B Resource C

4
Constraint graph
Graph G = (V, E) Vertexes: v / (v)
Name: v, event identifier Weight: (v), execution time
Edges: v w / ev,w Positive edge v w, weight ev,w: min
constraint Negative edge v w, weight -ew,v: max
constraint
Scheduling algorithm Traverse all nodes in sequence -
serialize events on single processor Satisfy timing constraints - no positive
loop is allowed

5
Algorithm
Serialize(Graph G, anchor a, candidate c) {
La := Single source longest paths (G, a);
if positive cycle found,
return Fail ;
C := topological successors of candidate c;
if (C is empty )
return schedule with (v) = longest path from a;
D := C;
while (D not empty) {
v := SelectSuccessor(D);
B: foreach u C - {v} {
add edge (v, u) to G, with weight
evu = Max((v), La(u) - La(v)); /* delay all successors by at least (v) */
}
Serialize(G, a, v);
if (schedule found) return schedule;
Undo step B; /* else - positive cycle or backtrack */
} /* while */
return Fail ; /* no more candidates */
}

6
Extended constraint graph
Graph G = (V, E) Vertexes: v / r / (v)
Name: v, event identifier Resource: r, execution resource of the event Weight: (v), execution time
Edges: v w / ev,w Positive edge v w, weight ev,w: min
constraint Negative edge v w, weight -ew,v: max
constraint
Scheduling algorithm Traverse nodes of each resource in
sequence - serialize events on each execution resource
Satisfy timing constraints - no positive loop is allowed

7
Algorithm
Serialize(Graph G, anchor a, candidate c) {
La := Single source longest paths (G, a);
if positive cycle found,
return Fail ;
C := topological successors of candidate c;
if (C is empty )
return schedule with (v) = longest path from a;
D := C;
while (D not empty) {
v := SelectSuccessor(D);
B: foreach u C - {v} {
if (Rv = Ru) { /* add edge to events on same execution resource */
add edge (v, u) to G, with weight
evu = Max((v), La(u) - La(v));
}
}
Serialize(G, a, v);
if (schedule found) return schedule;
Undo step B; /* else - positive cycle or backtrack */
} /* while */
return Fail ; /* no more candidates */
}

8
Example revisited – Mars Rover
System specification 6 wheel motors 4 steering motors System health check Hazard detection
Power supply Battery (non-rechargeable) Solar panel
Power consumption Digital
Computation, imaging, communication, control Mechanical
Driving, steering Thermal
Motors must be heated in low-temperature environment

9
Timing constraints – Mars Rover
Operation Duration Timing constraintsHealth check 10 s Once in every 10-minute intervalHeating steering motors 5 sHeating wheel motors 5 sHazard detection 10 s Before steering
Steering 5 sBefore driving ALL four steering motors must be heated during the 50-second period prior to steering.
Driving 10 s ALL six wheel motors must be heated during the 50-second period prior to driving.

10
Scheduling method
Constraint graph construction Nodes: operations Edges: precedence relationship between operations
Resource specification Resource: an executing unit that can perform operations independently
Six thermal resources for wheel heating Four thermal resources for steer motor heating One mechanical resource for driving One mechanical resource for steering One computation resource for control
Operations on one resource must be serialized
Scheduling Primary resource selection Schedule primary resource by applying graph algorithms Auxiliary resources and power requirement are considered as scheduling
constraints

11
Constraint graph
System health check /
Thc
System health check /
Thc
thc -(thc + Thc)
Heat wheel 1 / Thw
Heat wheel 2 / Thw
Heat wheel 3 / Thw
Heat wheel 4 / Thw
Heat wheel 5 / Thw
Heat wheel 6 / Thw
Heat steer 2 / Ths
Heat steer 3 / Ths
Heat steer 4 / Ths
Hazard detection / Thd
Steer / Ts
Drive / Td
- thw
-ths
Heat steer 1 / Ths

12
-ths + Ths_E
-thw + Thw_E
thc -(thc + Thc)
Resource specification
Hazard detection (C) /
Thc / Phc_CHealth check (C) /
Thc / Phc_C
Heat steer i (C) / Ths_C /
Phs_C
Heat steer i
(T) / Ths_T /
Phs_T
Heat wheel j
(C) / Thw_C
/ Phw_CHeat
wheel j (T) / Thw_T /
Phw_T
Steer (C) / Ts_C /
Ps_CSteer
(M) / Ts_M /
Ps_M
Drive (C) / Td_C /
Pd_C
Drive (M) / Td_M /
Pd_M
Health check (C) /
Thc / Phc_C
Computation
Mechanical
Thermal
Heat steer i
Heat wheel j
Health check
Health check
Steer
Drive
Hazard detection

13
Scheduling graph
Hazard detection (C) /
Thc / Phc_C
Heat steer i (C) / Ths_E /
Phs_E
Heat steer i
(T) / Ths_T /
Phs_T
Heat wheel j
(C) / Thw_E
/ Phw_E
Heat wheel j
(T) / Thw_T /
Phw_T
Steer (C) / Ts_C /
Ps_CSteer
(M) / Ts_M /
Ps_M
Drive (C) / Td_C /
Pd_CDrive
(M) / Td_M /
Pd_M
-ths + Ths_E
-thw
Primary resource: Computation
Auxiliary resource: Mechanical
Auxiliary resource: Thermal
Health check (C) /
Thc / Phc_C
thc -(thc + Thc)
-ths
-thw + Thw_E
-Ts_C + Ts_M


















