
1-s2.0-S0143974X10002749-main
8
Journal of Constructiona l Steel Research 67 (2011) 585–592 Contents lists available at ScienceDirect Journal of Constructional Steel Research journal homepage: www.elsevier.com/locate/jcsr Nonlinear inelastic analysis of space frames Huu-Tai Thai, Seung-Eock Kim ∗ Department of Civil and Environmental Engineering, Sejong University, 98 Gunja Dong Gwangjin Gu, Seoul 143-747, Republic of Korea a r t i c l e i n f o Article history: Received 20 September 2010 Accepted 4 December 2010 Keywords: Nonlinear analysis Stability function Space frame Geometric nonlinearity Material nonlinearity a b s t r a c t In this paper, a fiber beam–column element which considers both geometric and material nonlinearities is presented. The geometric nonlinearities are captured using stability functions obtained from the exact stability solution of a beam–column subjected to axial force and bending moments. The material nonlinearities are included by tracing the uniaxial stress–strain relationship of each fiber on the cross sec tions. The non lin ear equilibrium equati ons are solved using an incremental iterat ive scheme bas ed on the gener alize d displa cemen t contr ol meth od. Usingonly one element per membe r in structure model ing, the nonl inearresponsespredictedby the propos ed element compare wellwith thosegiven by comme rcial finite element packages and other available results. Numerical examples are presented to verify the accuracy and efficiency of the proposed element. © 2010 Elsevier Ltd. All rights reserved. 1. Introduction In the past few decades, there have been numerous studies to improve the accuracy of the beam–column element for the non linear ana lys is of stee l fra mes. In genera l, the nonlin ear res ponse of steel fra mes can be pre dic ted by usi ng eit her the finite element method or the beam–column approach. The finite element approach is often based on a stiffness or displacement formulation in which cubic and linear interpolation functions are used forthe tra nsverse andaxialdispla ceme nts , respec tively[ 1–5]. Since this method is bas ed commonly on an ass ume d cubic poly nomia l varia tion of trans verse displa cement alongthe elemen t length, it is unable to capture accurately the effect of axial force act ing thro ugh the lat eral dis pla cement of the element (P –δ effect) when one eleme nt per membe r is us ed [6]. Hence, it overestimates the strength of a member under significant axial for ce. Alt hough the accura cy of this method can be improv ed by usi ng severa l ele ments per member in the modeli ng, it is genera lly recognized to be compu tation ally intensive because of a very refined discretis ation of the structures. The beam–c olumn app roach is based onthestabil ityfuncti onswhicharederived from the exact stability function of a beam–column subjected to axial force and bending moments [7–12]. This approach can capture accur ately the P –δ ef fect of a beam–co lumn member by using only one or two element s per member in the modeli ng, hence, to save computational time. In par all el with the above developments, dif fer ent bea m– col umn models hav e been pro pos ed to represent ine las tic mat eri al ∗ Correspondin g author. Tel.: +82 2 3408 3291; fax: +82 2 3408 3332. E-mail addresses: [email protected](H.-T. Thai), [email protected] (S.-E. Kim). behavi or. These models can be groupe d int o two cat egories: lumpe d plast icity [9,10,13] mode l and dis tri bute d pla sti cit y model [5,14–18]. In the lumped plasticity model, the inelastic behavior of material is assumed to be concentrated at point hinges that are usually located at the ends of the member. The force–deformation rel ati on at thes e hinges is bas ed on for ce res ult ant s. The advant age of this model is that it is si mple in formul ation as well as implementation. However, the disadvantage of this model is that theforce –def ormati on relati on at thehingesis notalway s available and accurate for every section. In the distributed plasticity model, the inelastic behavior of material is distributed along the member len gth since the ele ment beha vior is monitored thr ough numeri cal integration of constitutive behavior at a finite number of control sectio ns. The nonli near constitutiv e behavi or at these sections is deri ved using one of the following methods: (1) moment– curva ture relations; (2) force and deformation resultants ; and (3) uniaxial stress–strain relations of fibers on the cross sections. Alt hough fiber mode l is the mos t comput ati ona llyintens iveamong others, it rep resent s the inelastic behavior of mat erial mor e accurately and rationally than concentrated plasticity model. Thi s paper proposes a fiber bea m–co lumn ele ment for the nonlinear inelastic analysis of space steel frames. The spread of plasticity over the cross section and along the member length is captured by tracing the uniaxial stress–strain relations of each fiber on the cross sec tions loc ate d at the sel ecte d int egr ati on points along the member length. The Gauss–Lobatto integration rul e is ado pte d her ein for eva lua ting numeri cal ly ele ment sti ffness matrix instead of the cla ssi cal Gauss inte gra tion rul e because it always inc ludes the end sec tions of the int egr ati on fie ld. Since inelastic behavior in beam elements often concentrates at the ends of the member , mon itoring the end sec tions of the ele ment results in improv ed accura cy and numerical sta bil ity [19]. 0143-97 4X/$ – see front matter © 2010 Elsevier Ltd. All rights reserved. doi:10.1016/j.jcsr.2010.12.003
-
Upload
mihai-cojocaru -
Category
Documents
-
view
216 -
download
0
Transcript of 1-s2.0-S0143974X10002749-main

7/30/2019 1-s2.0-S0143974X10002749-main
http://slidepdf.com/reader/full/1-s20-s0143974x10002749-main 1/8
Journal of Constructional Steel Research 67 (2011) 585–592
Contents lists available at ScienceDirect
Journal of Constructional Steel Research
journal homepage: www.elsevier.com/locate/jcsr
Nonlinear inelastic analysis of space frames
Huu-Tai Thai, Seung-Eock Kim ∗
Department of Civil and Environmental Engineering, Sejong University, 98 Gunja Dong Gwangjin Gu, Seoul 143-747, Republic of Korea
a r t i c l e i n f o
Article history:
Received 20 September 2010
Accepted 4 December 2010
Keywords:
Nonlinear analysis
Stability function
Space frame
Geometric nonlinearity
Material nonlinearity
a b s t r a c t
In this paper, a fiber beam–column element which considers both geometric and material nonlinearitiesis presented. The geometric nonlinearities are captured using stability functions obtained from the
exact stability solution of a beam–column subjected to axial force and bending moments. The materialnonlinearities are included by tracing the uniaxial stress–strain relationship of each fiber on the crosssections. The nonlinear equilibrium equations are solved using an incremental iterative scheme based on
the generalized displacement control method. Usingonly one element per member in structure modeling,the nonlinearresponsespredictedby the proposed element compare wellwith thosegiven by commercial
finite element packages and other available results. Numerical examples are presented to verify theaccuracy and efficiency of the proposed element.
© 2010 Elsevier Ltd. All rights reserved.
1. Introduction
In the past few decades, there have been numerous studiesto improve the accuracy of the beam–column element for thenonlinear analysis of steel frames. In general, the nonlinear
response of steel frames can be predicted by using either thefinite element method or the beam–column approach. The finiteelement approach is often based on a stiffness or displacementformulation in which cubic and linear interpolation functions areused forthe transverse andaxialdisplacements, respectively[1–5].Since this method is based commonly on an assumed cubicpolynomial variation of transverse displacement alongthe elementlength, it is unable to capture accurately the effect of axial forceacting through the lateral displacement of the element (P –δeffect) when one element per member is used [6]. Hence, itoverestimates the strength of a member under significant axialforce. Although the accuracy of this method can be improvedby using several elements per member in the modeling, it isgenerally recognized to be computationally intensive because of
a very refined discretisation of the structures. The beam–columnapproach is based on the stabilityfunctionswhich arederived fromthe exact stability function of a beam–column subjected to axialforce and bending moments [7–12]. This approach can captureaccurately the P –δ effect of a beam–column member by using onlyone or two elements per member in the modeling, hence, to savecomputational time.
In parallel with the above developments, different beam–column models have been proposed to represent inelastic material
∗ Corresponding author. Tel.: +82 2 3408 3291; fax: +82 2 3408 3332.
E-mail addresses: [email protected](H.-T. Thai), [email protected](S.-E. Kim).
behavior. These models can be grouped into two categories:
lumped plasticity [9,10,13] model and distributed plasticity model
[5,14–18]. In the lumped plasticity model, the inelastic behavior
of material is assumed to be concentrated at point hinges that are
usually located at the ends of the member. The force–deformation
relation at these hinges is based on force resultants. The advantage
of this model is that it is simple in formulation as well as
implementation. However, the disadvantage of this model is that
theforce–deformation relation at thehingesis notalways available
and accurate for every section. In the distributed plasticity model,
the inelastic behavior of material is distributed along the member
length since the element behavior is monitored through numerical
integration of constitutive behavior at a finite number of control
sections. The nonlinear constitutive behavior at these sections
is derived using one of the following methods: (1) moment–
curvature relations; (2) force and deformation resultants; and
(3) uniaxial stress–strain relations of fibers on the cross sections.
Although fiber model is the most computationallyintensiveamong
others, it represents the inelastic behavior of material more
accurately and rationally than concentrated plasticity model.
This paper proposes a fiber beam–column element for the
nonlinear inelastic analysis of space steel frames. The spread of
plasticity over the cross section and along the member length is
captured by tracing the uniaxial stress–strain relations of each
fiber on the cross sections located at the selected integration
points along the member length. The Gauss–Lobatto integration
rule is adopted herein for evaluating numerically element stiffness
matrix instead of the classical Gauss integration rule because
it always includes the end sections of the integration field.
Since inelastic behavior in beam elements often concentrates at
the ends of the member, monitoring the end sections of the
element results in improved accuracy and numerical stability [19].
0143-974X/$ – see front matter © 2010 Elsevier Ltd. All rights reserved.doi:10.1016/j.jcsr.2010.12.003

7/30/2019 1-s2.0-S0143974X10002749-main
http://slidepdf.com/reader/full/1-s20-s0143974x10002749-main 2/8
586 H.-T. Thai, S.-E. Kim / Journal of Constructional Steel Research 67 (2011) 585–592
Although the fiber model is included in DRAIN-3DX [20] andOpenSees [21] programs to represent the material nonlinearity,the geometric nonlinearity caused by the interaction between theaxial force and bending moments (P –δ effect) was not considered.Therefore, these methods overestimate the strength of a membersubjected to significant axial force if only one or few elementsper member are used in the modeling. In this research, thestability functions obtained from the closed-form solution of abeam–column subjected to end forces are used to accuratelycapture the P –δ effect.Numerical examples are presented to verifythe accuracy and efficiency of the proposed element in predictingnonlinear inelastic response of space steel frames.
2. Element formulations
2.1. Geometric nonlinear P–δ effect
To capture the effect of axial force acting through the lateraldisplacement of the beam–column element (P –δ effect), thestability functions reported by Chen and Lui [22] are used tominimize modeling and solution time. Generally only one elementper member is needed to accurately capture the P –δ effect. From
Kim et al. [10], the incremental force–displacement equation of space beam–column element which accounts for transverse sheardeformation effects can be expressed as
∆P
∆M yA
∆M yB
∆M zA
∆M zB
∆T
=
EA
L0 0 0 0 0
0 C 1 y C 2 y 0 0 0
0 C 2 y C 1 y 0 0 00 0 0 C 1 z C 2 z 00 0 0 C 2 z C 1 z 0
0 0 0 0 0GJ
L
×
∆δ∆θ yA
∆θ yB∆θ zA
∆θ zB
∆φ
(1)
where ∆P , ∆M yA, ∆M yB, ∆M zA, ∆M zB, and ∆T are incrementalaxial force, end moments with respect to y and z axes, andtorsion respectively; ∆δ, ∆θ yA, ∆θ yB, ∆θ zA, ∆θ zB, and ∆φ are theincremental axial displacement, joint rotations, and angle of twist;C 1 y, C 2 y, C 1 z , and C 2 z are bending stiffness coefficients accountingfor the transverse shear deformation effects, and are expressed as
C 1 y =k2
1 y − k22 y + k1 y Asz GL
2k1 y + 2k2 y + Asz GL(2a)
C 2 y =
−k21 y + k2
2 y + k2 y Asz GL
2k1 y + 2k2 y + Asz GL (2b)
C 1 z =k2
1 z − k22 z + k1 z AsyGL
2k1 z + 2k2 z + AsyGL(2c)
C 2 z =−k2
1 z + k22 z + k2 y AsyGL
2k1 z + 2k2 z + AsyGL(2d)
where k1n = S 1n(EI n/L) and k2n = S 2n(EI n/L); S 1n and S 2n arestability functions with respect to n axis (n = y, z ), and areexpressed as
S 1n =
knL sin(knL) − (knL)2 cos(knL)
2 − 2cos(knL) − knL sin(knL)if P < 0
(knL)2
cosh(knL) − knL sinh(knL)2 − 2 cosh(knL) + knL sinh(knL)
if P > 0
(3a)
S 2n =
(knL)2 − knL sin(knL)
2 − 2cos(knL) − knL sin(knL)if P < 0
knL sin(knL) − (knL)2
2 − 2 cosh(knL) + knL sinh(knL)if P > 0
(3b)
where k2n = |P |/EI n. EA, EI n, and GJ denote the axial, bending and
torsional stiffness of the beam–column element, and aredefined as
EA =
h− j=1
w j
m−
i=1
E i Ai
j
(4)
EI y =
h− j=1
w j
m−
i=1
E i Ai z 2i
j
(5)
EI z =
h− j=1
w j
m−
i=1
E i Ai y2i
j
(6)
GJ =
h− j=1
Gw j
m−
i=1
( y2i + z 2i ) Ai
j
(7)
in which h is the total number of monitored sections along anelement; m is the total number of fibers divided on the monitoredcross section; w j is the weighting factor of the jth section; E i and Ai
are the tangent modulus of the material and the area of ith fiber,respectively; yi and z i are the coordinates of ith fiber in the cross
section. The element force–deformation relationship of Eq. (1) canbe expressed in symbolic form as
{∆F } = [K e]{∆d} (8)
where
{∆F } =
∆P ∆M yA ∆M yB ∆M zA ∆M zB ∆T T
(9)
{∆d} = ∆δ ∆θ yA ∆θ yB ∆θ zA ∆θ zB ∆φT
. (10)
The element stiffness matrix is evaluated numerically by theGauss–Lobatto integration scheme since this method allows fortwo integration points to coincide with the end sections of theelements [23]. Since inelastic behavior in beam elements oftenconcentrates at the ends of the member, the monitoring of the
end sections of the element is advantageous from the standpointof accuracy and numerical stability. By contrast, the outermostintegration points of the classical Gauss integration method only
approach the end sections with increasing order of integration,but never coincide with the end sections and, hence, result inoverestimation of the member strength [24].
2.2. Material nonlinear effect
In order to capture the gradual plastification throughout themember’s cross section, a fiber model as shown in Fig. 1 is used.The fiber beam–column element is divided into a discrete number
of monitored sections represented by the integration points. Eachmonitored section is divided into m fibers and each fiber isrepresented by its area Ai and coordinate location corresponding to
its centroid ( yi, z i). Section deformations are represented by threestrain resultants: the axial strain ε along the longitudinal axis andtwo curvatures χ z and χ y with respect to z and y axes, respectively.The corresponding force resultants are the axial force N and two
bending moments M z and M y. The section forces and deformationsare grouped in the following vectors:
Section force vector {Q } = M z M y N T
(11)
Section deformation vector {q} =
χ z χ y εT
. (12)

7/30/2019 1-s2.0-S0143974X10002749-main
http://slidepdf.com/reader/full/1-s20-s0143974x10002749-main 3/8
H.-T. Thai, S.-E. Kim / Journal of Constructional Steel Research 67 (2011) 585–592 587
Fig. 1. Fiber concept.
The incremental section force vector at each integration points is
determined based on the incremental element force vector {∆F }as
{∆Q } = [B( x)] {∆F } (13)
where [B( x)] is the force interpolation function matrix given as
[B( x)] =
−δ y( x) 0 0 ( x/L − 1) x/L 0−δ z ( x) ( x/L − 1) x/L 0 0 0
1 0 0 0 0 0
(14)
where δ y( x) and δ z ( x) are the lateral displacements for the local y
and z axes, respectively. Since the curvature can be approximated
by thesecondderivative of the lateral displacement, δ y( x) and δ z ( x)
are obtained from solving the differential equations as [22]
δ y( x) = −M zA
EI z k2
z
[sin(k z x)
tan(k z L)− cos(k z x) −
x
L+ 1
]
−M zB
EI z k2 z
[sin(k z x)
sin(k z L)−
x
L
](15)
δ z ( x) =M yA
EI yk2 y
[sin(k y x)
tan(k yL)− cos(k y x) −
x
L+ 1
]
+M yB
EI yk2 y
[sin(k y x)
sin(k yL)−
x
L
]. (16)
The section deformation vector is determined based on the section
force vector as
{∆q} = [ksec]−1{∆Q } (17)
where [ksec] is the section stiffness matrix given as
[ksec] =
m−i=1
E i Ai y2i
m−i=1
E i Ai yi z i
m−i=1
E i Ai(− yi)
m−i=1
E i Ai yi z i
m−i=1
E i Ai z 2i
m−i=1
E i Ai z i
m−i=1
E i Ai(− yi)
m−i=1
E i Ai z i
m−i=1
E i Ai
. (18)
Followingthe hypothesis that plane sections remainplane andnor-mal to the longitudinal axis, the incremental uniaxial fiber strain
vector is computed based on the incremental section deformationvector as
{∆e} = [l]{∆q} (19)
where [l] is the linear geometric matrix given as follows
[l] =
− y1 z 1 1− y2 z 2 1
· · · · · · · · ·− ym z m 1
. (20)
Once the incremental fiber strain is evaluated, the incrementalfiber stress is computed based on the stress–strain relationship of material model. The tangent modulus of each fiber is updated fromthe incremental fiber stress and incremental fiber strain as
E i =∆σ i
∆ei
. (21)
Eq. (21) leads to updating of the element stiffness matrix [K e] inEq. (8) and section stiffness matrix [ksec] in Eq. (18) during theiteration process. Based on the new tangent modulus of Eq. (21),the location of the section centroid is also updated during theincremental load steps to take into account the distribution of section plasticity. The section resisting forces are computed by
summation of the axial force and biaxial bending moment contri-butions of all fibers as
{Q R} =
M z
M yN
=
m−i=1
σ i Ai(− yi)
m−i=1
σ i Ai z i
m−i=1
σ i Ai
. (22)
2.3. Element stiffness matrix accounting for P –∆ effect
The P –∆ effect is the effect of axial force P acting through the
relative transverse displacement of the member ends ∆. This effectcan be considered by using the geometric stiffness matrix [K g ] as
[K g ]12×12 =
[[K s] −[K s]
−[K s]T [K s]
](23)
where
[K s] =
0 a −b 0 0 0a c 0 0 0 0
−b 0 c 0 0 00 0 0 0 0 00 0 0 0 0 00 0 0 0 0 0
(24)
and
a = M zA + M zB
L2, b = M yA + M yB
L2, c = P
L. (25)
The displacement of a beam–column element can be decomposedinto two parts: the element deformation and rigid displacement.The element deformation increment {∆d} in Eq. (10) can beobtained from the element displacement increment {∆D} as
{∆d} = [T ]6×12{∆D} (26)
where
[T ]6×12
=
−1 0 0 0 0 0 1 0 0 0 0 0
0 0 −1/L 0 1 0 0 0 1/L 0 0 0
0 0 −1/L 0 0 0 0 0 1/L 0 1 0
0 1/L 0 0 0 1 0 −1/L 0 0 0 0
0 1/L 0 0 0 0 0 −1/L 0 0 0 10 0 0 1 0 0 0 0 0 −1 0 0
. (27)
7/30/2019 1-s2.0-S0143974X10002749-main
http://slidepdf.com/reader/full/1-s20-s0143974x10002749-main 4/8
588 H.-T. Thai, S.-E. Kim / Journal of Constructional Steel Research 67 (2011) 585–592
Thetangent stiffnessmatrix of a beam–column element is obtained
as follows
[K ]12×12 = [T ]T 6×12[K e]6×6[T ]6×12 + [K g ]12×12. (28)
3. Nonlinear solution procedure
This section presents a numerical method for solving thenonlinear equations. Among several numerical methods, the
GDC method proposed by Yang and Shieh [25] appears to beone of the most robust and effective methods for solving thenonlinear problems with multiple critical points because of itsgeneral numerical stability and efficiency. The incremental form
of equilibrium equation can be rewritten for the jth iteration of theith incremental step as
[K i j−1]{∆Di j} = λi
j{P̂ } + {Ri j−1} (29)
where [K i j−1] is the tangent stiffness matrix, {∆Di j} is the
displacement increment vector, {P̂ } is the reference load vector,{Ri
j−1} is the unbalanced force vector, and λi j is the load increment
parameter.
Eq. (29) can be decomposed into the following equations
[K i j−1]{∆D̂i j} = {P̂ } (30)
[K i j−1]{∆D̄i j} = {Ri
j−1} (31)
{∆Di j} = λi
j{∆D̂i j} + {∆D̄i
j}. (32)
The load increment parameter λi j is unknown. It is determinedfrom
a constraint condition. For the first iterative step ( j = 1), the loadincrement parameter λi
j is determined based on the Generalized
Stiffness Parameter (GSP ) as
λi1 = λ1
1
|GSP | (33)
where λ11 is an initial value of a load increment parameter, and the
GSP is defined as
GSP ={∆D̂1
1}T {∆D̂11}
{∆D̂i−11 }T {∆D̂i
1}. (34)
For the following iteration ( j ≥ 2), the load increment parameterλi
j is computed as
λi j = −
{∆D̂i−11 }T {∆D̄i
j}
{∆D̂i−11 }T {∆D̂i
j}(35)
where {∆D̂i−11 } is the displacement increment generated by the
reference load {P̂ } at the first iteration of the previous (i − 1)
incremental step, and {∆D̂i j} and {∆D̄i
j} denote the displacement
increments generated by the reference load and unbalanced forcevectors, respectively, at the jth iterationof the ith incremental step,
as defined in Eqs. (30) and (31).The following is a step-by-step summary of solution algorithm
focused on the element state determination process of a singleiteration.
1. Solve the global equation and update the element displace-ment increment {∆D}.
2. Compute the element deformation increment {∆d} using
Eq. (26).3. Compute the element force increment {∆F } using Eq. (8) based
on the element stiffness matrix [K e]6×6 of the previous step.4. Compute the section force increment {∆Q } using Eq. (13).5. Compute the section stiffness {ksec} using Eq. (18).
6. Compute the section deformation increment {∆q} usingEq. (17).
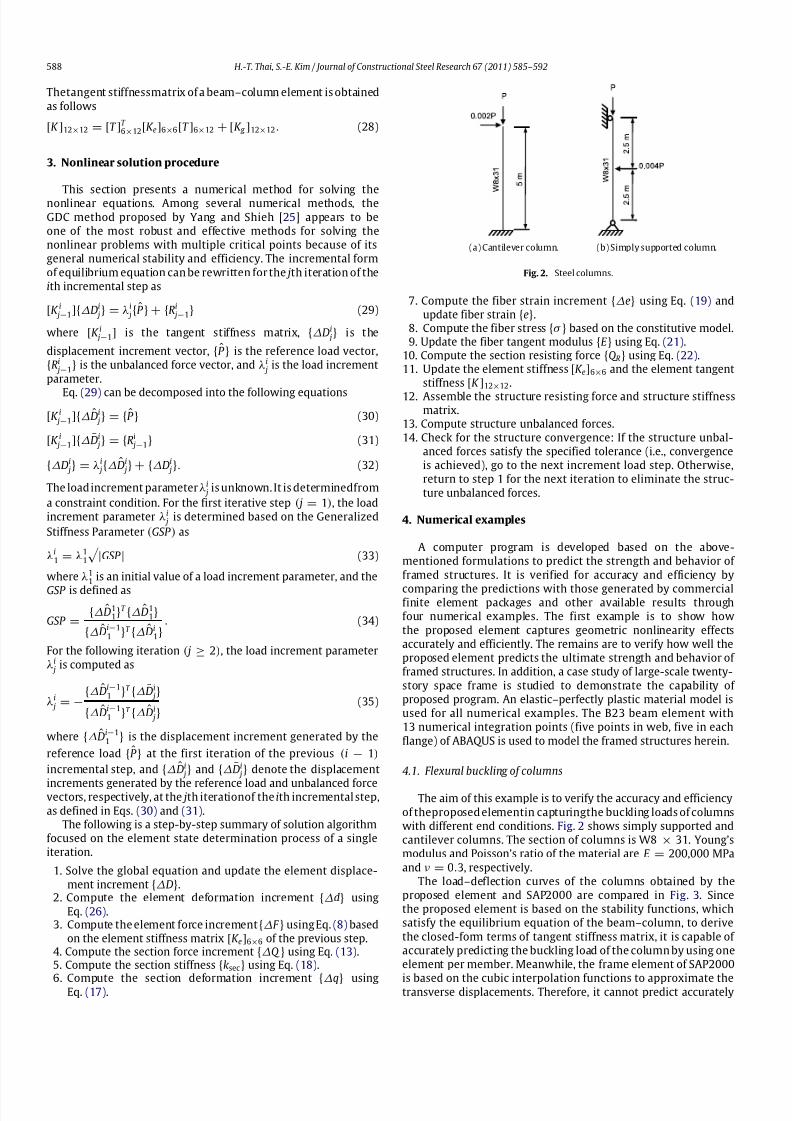
(a) Cantilever column. (b) Simply supported column.
Fig. 2. Steel columns.
7. Compute the fiber strain increment {∆e} using Eq. (19) andupdate fiber strain {e}.
8. Compute the fiber stress {σ } based on the constitutive model.9. Update the fiber tangent modulus {E } using Eq. (21).
10. Compute the section resisting force {Q R} using Eq. (22).11. Update the element stiffness [K e]6×6 and the element tangent
stiffness [K ]12×12.
12. Assemble the structure resisting force and structure stiffnessmatrix.
13. Compute structure unbalanced forces.14. Check for the structure convergence: If the structure unbal-
anced forces satisfy the specified tolerance (i.e., convergenceis achieved), go to the next increment load step. Otherwise,return to step 1 for the next iteration to eliminate the struc-
ture unbalanced forces.
4. Numerical examples
A computer program is developed based on the above-mentioned formulations to predict the strength and behavior of
framed structures. It is verified for accuracy and efficiency by
comparing the predictions with those generated by commercialfinite element packages and other available results throughfour numerical examples. The first example is to show how
the proposed element captures geometric nonlinearity effectsaccurately and efficiently. The remains are to verify how well theproposed element predicts the ultimate strength and behavior of framed structures. In addition, a case study of large-scale twenty-
story space frame is studied to demonstrate the capability of proposed program. An elastic–perfectly plastic material model isused for all numerical examples. The B23 beam element with13 numerical integration points (five points in web, five in each
flange) of ABAQUS is used to model the framed structures herein.
4.1. Flexural buckling of columns
The aim of this example is to verify the accuracy and efficiency
of theproposed elementin capturingthe buckling loads of columnswith different end conditions. Fig. 2 shows simply supported andcantilever columns. The section of columns is W8 × 31. Young’smodulus and Poisson’s ratio of the material are E = 200,000 MPa
and ν = 0.3, respectively.The load–deflection curves of the columns obtained by the
proposed element and SAP2000 are compared in Fig. 3. Sincethe proposed element is based on the stability functions, whichsatisfy the equilibrium equation of the beam–column, to derive
the closed-form terms of tangent stiffness matrix, it is capable of accurately predicting the buckling load of the column by using oneelement per member. Meanwhile, the frame element of SAP2000
is based on the cubic interpolation functions to approximate thetransverse displacements. Therefore, it cannot predict accurately
7/30/2019 1-s2.0-S0143974X10002749-main
http://slidepdf.com/reader/full/1-s20-s0143974x10002749-main 5/8
H.-T. Thai, S.-E. Kim / Journal of Constructional Steel Research 67 (2011) 585–592 589
(a) Cantilever column. (b) Simply supported column.
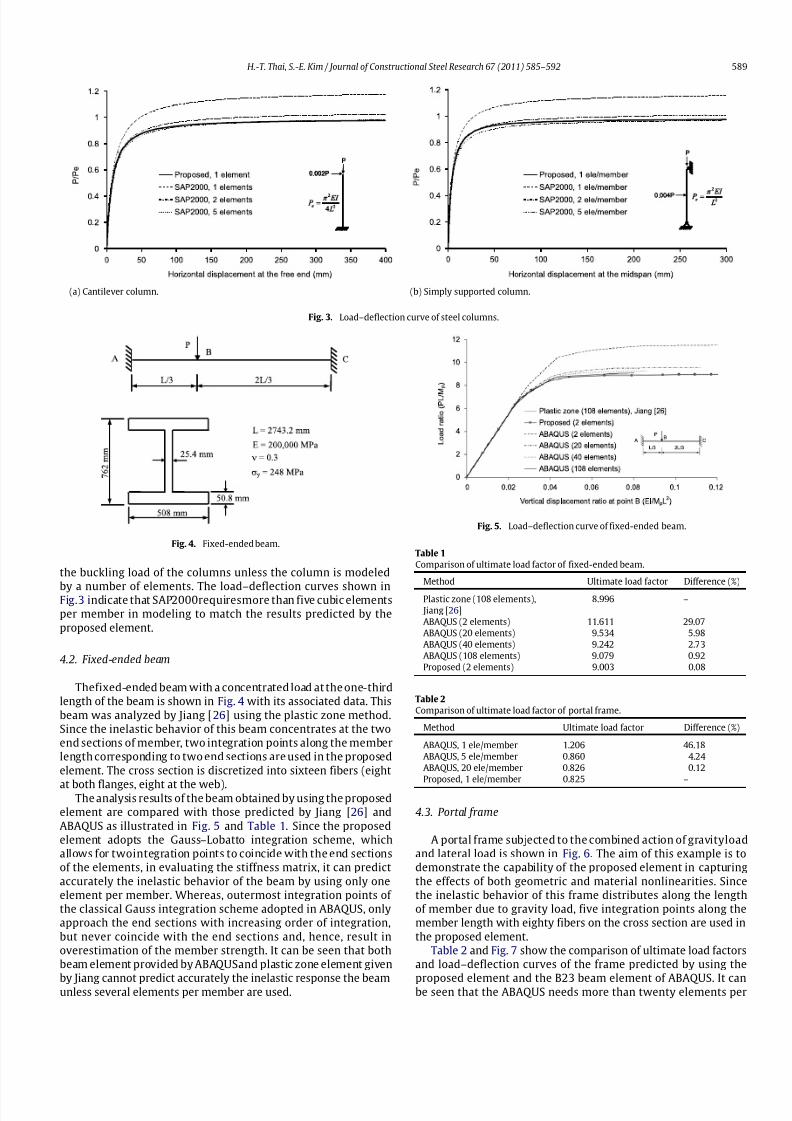
Fig. 3. Load–deflection curve of steel columns.
Fig. 4. Fixed-ended beam.
the buckling load of the columns unless the column is modeled
by a number of elements. The load–deflection curves shown inFig.3 indicate that SAP2000requiresmore than five cubic elementsper member in modeling to match the results predicted by the
proposed element.
4.2. Fixed-ended beam
Thefixed-ended beam with a concentrated load at the one-thirdlength of the beam is shown in Fig. 4 with its associated data. This
beam was analyzed by Jiang [26] using the plastic zone method.Since the inelastic behavior of this beam concentrates at the twoend sections of member, two integration points along the memberlength corresponding to two end sections are used in the proposed
element. The cross section is discretized into sixteen fibers (eight
at both flanges, eight at the web).The analysis results of the beam obtained by using the proposed
element are compared with those predicted by Jiang [26] and
ABAQUS as illustrated in Fig. 5 and Table 1. Since the proposedelement adopts the Gauss–Lobatto integration scheme, whichallows for twointegration points to coincide with the end sectionsof the elements, in evaluating the stiffness matrix, it can predict
accurately the inelastic behavior of the beam by using only oneelement per member. Whereas, outermost integration points of the classical Gauss integration scheme adopted in ABAQUS, onlyapproach the end sections with increasing order of integration,
but never coincide with the end sections and, hence, result inoverestimation of the member strength. It can be seen that bothbeam element provided by ABAQUSand plastic zone element given
by Jiang cannot predict accurately the inelastic response the beamunless several elements per member are used.
Fig. 5. Load–deflection curve of fixed-ended beam.
Table 1
Comparison of ultimate load factor of fixed-ended beam.
Method Ultimate load factor Difference (%)
Plastic zone (108 elements),
Jiang [26]
8.996 –
ABAQUS (2 elements) 11.611 29.07
ABAQUS (20 elements) 9.534 5.98
ABAQUS (40 elements) 9.242 2.73
ABAQUS (108 elements) 9.079 0.92
Proposed (2 elements) 9.003 0.08
Table 2
Comparison of ultimate load factor of portal frame.
Method Ultimate load factor Difference (%)
ABAQUS, 1 ele/member 1.206 46.18
ABAQUS, 5 ele/member 0.860 4.24
ABAQUS, 20 ele/member 0.826 0.12
Proposed, 1 ele/member 0.825 –
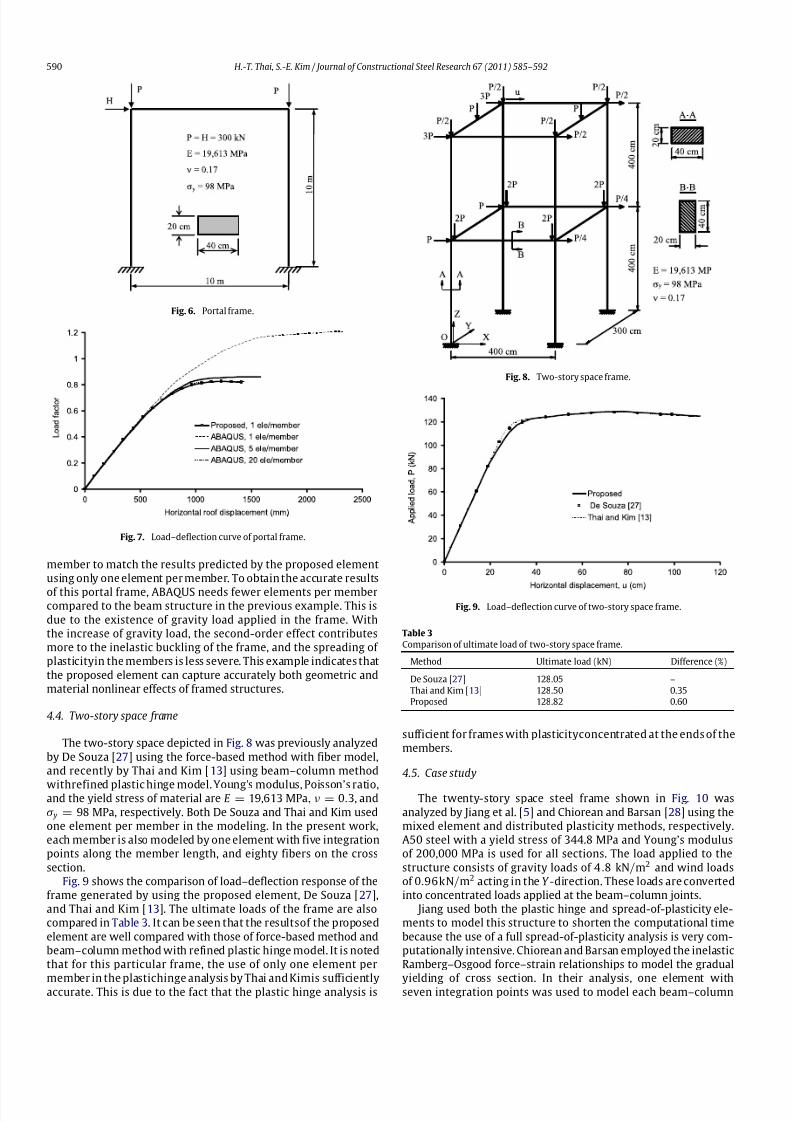
4.3. Portal frame
A portal frame subjected to the combined action of gravityloadand lateral load is shown in Fig. 6. The aim of this example is todemonstrate the capability of the proposed element in capturing
the effects of both geometric and material nonlinearities. Sincethe inelastic behavior of this frame distributes along the lengthof member due to gravity load, five integration points along themember length with eighty fibers on the cross section are used in
the proposed element.Table 2 and Fig. 7 show the comparison of ultimate load factors
and load–deflection curves of the frame predicted by using the
proposed element and the B23 beam element of ABAQUS. It canbe seen that the ABAQUS needs more than twenty elements per
7/30/2019 1-s2.0-S0143974X10002749-main
http://slidepdf.com/reader/full/1-s20-s0143974x10002749-main 6/8
590 H.-T. Thai, S.-E. Kim / Journal of Constructional Steel Research 67 (2011) 585–592
Fig. 6. Portal frame.
Fig. 7. Load–deflection curve of portal frame.
member to match the results predicted by the proposed elementusing only one element per member. To obtain the accurate results
of this portal frame, ABAQUS needs fewer elements per membercompared to the beam structure in the previous example. This is
due to the existence of gravity load applied in the frame. Withthe increase of gravity load, the second-order effect contributesmore to the inelastic buckling of the frame, and the spreading of plasticityin the members is less severe. This example indicates that
the proposed element can capture accurately both geometric andmaterial nonlinear effects of framed structures.
4.4. Two-story space frame
The two-story space depicted in Fig. 8 was previously analyzed
by De Souza [27] using the force-based method with fiber model,and recently by Thai and Kim [13] using beam–column method
withrefined plastic hinge model. Young’s modulus, Poisson’s ratio,and the yield stress of material are E = 19,613 MPa, ν = 0.3, andσ y = 98 MPa, respectively. Both De Souza and Thai and Kim usedone element per member in the modeling. In the present work,each member is also modeled by one element with five integrationpoints along the member length, and eighty fibers on the cross
section.Fig. 9 shows the comparison of load–deflection response of the
frame generated by using the proposed element, De Souza [27],and Thai and Kim [13]. The ultimate loads of the frame are alsocompared in Table 3. It can be seen that the resultsof the proposed
element are well compared with those of force-based method andbeam–column method with refined plastic hinge model. It is notedthat for this particular frame, the use of only one element per
member in the plastichinge analysis by Thai and Kimis sufficientlyaccurate. This is due to the fact that the plastic hinge analysis is
Fig. 8. Two-story space frame.
Fig. 9. Load–deflection curve of two-story space frame.
Table 3
Comparison of ultimate load of two-story space frame.
Method Ultimate load (kN) Difference (%)
De Souza [27] 128.05 –
Thai and Kim [13] 128.50 0.35Proposed 128.82 0.60
sufficient for frames with plasticityconcentrated at the ends of themembers.
4.5. Case study
The twenty-story space steel frame shown in Fig. 10 was
analyzed by Jiang et al. [5] and Chiorean and Barsan [28] using themixed element and distributed plasticity methods, respectively.A50 steel with a yield stress of 344.8 MPa and Young’s modulusof 200,000 MPa is used for all sections. The load applied to the
structure consists of gravity loads of 4.8 kN/m2 and wind loadsof 0.96kN/m2 acting in the Y -direction. These loads are convertedinto concentrated loads applied at the beam–column joints.
Jiang used both the plastic hinge and spread-of-plasticity ele-ments to model this structure to shorten the computational time
because the use of a full spread-of-plasticity analysis is very com-putationally intensive. Chiorean and Barsan employed the inelasticRamberg–Osgood force–strain relationships to model the gradual
yielding of cross section. In their analysis, one element withseven integration points was used to model each beam–column

7/30/2019 1-s2.0-S0143974X10002749-main
http://slidepdf.com/reader/full/1-s20-s0143974x10002749-main 7/8

7/30/2019 1-s2.0-S0143974X10002749-main
http://slidepdf.com/reader/full/1-s20-s0143974x10002749-main 8/8
592 H.-T. Thai, S.-E. Kim / Journal of Constructional Steel Research 67 (2011) 585–592
[13] Thai HT, Kim SE. Practical advanced analysis software for nonlinear inelasticanalysis of space steel structures. Advances in Engineering Software 2009;40(9):786–97.
[14] Del Coz Diaz J, Nieto P, Fresno D, Fernandez E. Non-linear analysis of cable networks by FEM and experimental validation. International Journal of Computer Mathematics 2009;86(2):301–13.
[15] DelCoz Diaz J, Garcia NietoP, VilanVilanJ, Suarez SierraJ. Non-linearbucklinganalysis of a self-weighted metallic roof by FEM. Mathematical and ComputerModelling 2010;51(3–4):216–28.
[16] Del Coz Diaz J, Garcia Nieto P, Vilan Vilan J, Martin Rodriguez A, Prado
Tamargo J, Lozano M. Non-linear analysis and warping of tubular pipeconveyors by the finite element method. Mathematical and ComputerModelling 2007;46(1–2):95–108.
[17] Del Coz Diaz J, Garcia Nieto P, Fernandez Rico M, Suarez Sierra J. Non-linearanalysis of the tubular ‘heart’ joint by FEM and experimental validation. Journal of Constructional Steel Research 2007;63(8):1077–90.
[18] DelCoz Diaz J, Garcia Nieto P, BetegonBiempicaC, Fernandez Rougeot G. Non-linear analysisof unboltedbaseplatesby theFEM andexperimental validation.Thin-Walled Structures 2006;44(5):529–41.
[19] Spacone E, Ciampi V, Filippou FC. Mixed formulation of nonlinear beam finiteelement. Computers and Structures 1996;58(1):71–83.
[20] Prakash V, Powell GH. DRAIN-3DX: base program user guide, version 1.10. A
computer program distributed by NISEE/Computer applications. Departmentof Civil Engineering, University of California at Berkeley; 1993.
[21] OpenSees. Open system for earthquake engineering simulation. PacificEarthquake Engineering Research Center, University of California at Berkeley;2009.
[22] Chen W, Lui E. Structural stability: theory and implementation. Amsterdam:Elsevier; 1987.
[23] Stroud A, Secrest D. Gaussian quadrature formulas. Englewood Cliffs (NJ):Prentice-Hall; 1966.
[24] Spacone E, Filippou F, Taucer F. Fibre beam–column model for non-linear
analysis of R/C frames: part I. formulation. Earthquake Engineering andStructural Dynamics 1996;25(7):711–25.
[25] Yang YB, Shieh MS. Solution method for nonlinear problems with multiplecritical points. AIAA Journal 1990;28(12):2110–6.
[26] Jiang XM. Second-order spread-of-plasticity analysis of spatial steel frames.Master thesis. Department of Civil Engineering, National University of Singapore; 2000.
[27] De Souza R. Force-based finite element for large displacement inelasticanalysis of frames. Ph.D. dissertation. Department of Civil and EnvironmentalEngineering, University of California at Berkeley; 2000.
[28] Chiorean CG, Barsan GM. Large deflection distributed plasticity analysis of 3Dsteel frameworks. Computers & Structures 2005;83(19–20):1555–71.


















