1 Haptic Systems 530-655 Mohsen Mahvash Lecture 2 9/1/06.
15
1 Haptic Systems 530-655 Mohsen Mahvash Lecture 2 9/1/06
-
Upload
christal-bishop -
Category
Documents
-
view
220 -
download
0
Transcript of 1 Haptic Systems 530-655 Mohsen Mahvash Lecture 2 9/1/06.

1
Haptic Systems 530-655
Mohsen Mahvash Lecture 29/1/06

2
Tip of a kinesthetic Haptic display and degrees of freedom
Relation between the tip position and joint angles
Encoders and measuring joint angles
Relation between joint torques and forces at the tip
Jacobean
Actuator equations
Nonidealities of a haptic device
Discussion
References
Generating Force-Feedback with a Manipulator

3
A point of haptic display whose position and orientation are used for haptic simulation
Through this point human user interacts with haptic systems
Haptic simulator defines the force and torques should be generated
at this point by the manipulator
Degrees of freedom of a haptic display:
The number of directions that a haptic display can pivot or move its tip
DOF of motion
DOF of sensing
DOF of actuation
Tip of a Kinesthetic haptic display

4
Tip Location and Degrees of Freedom
Tip
SensAble Phantom Omni
DOF of motion: 6
DOF of sensing: 6
DOF of actuation: 3

5
Tip Location and Degrees of Freedom
Tip
MPB 6S
DOF of motion: 7
DOF of sensing: 7
DOF of actuation: 6

6
Tip Location and Degrees of Freedom
Tip
da Vinci Master (From US Patent 06714839)
DOF of motion: 7
DOF of sensing: 7
DOF of actuation: 7
7
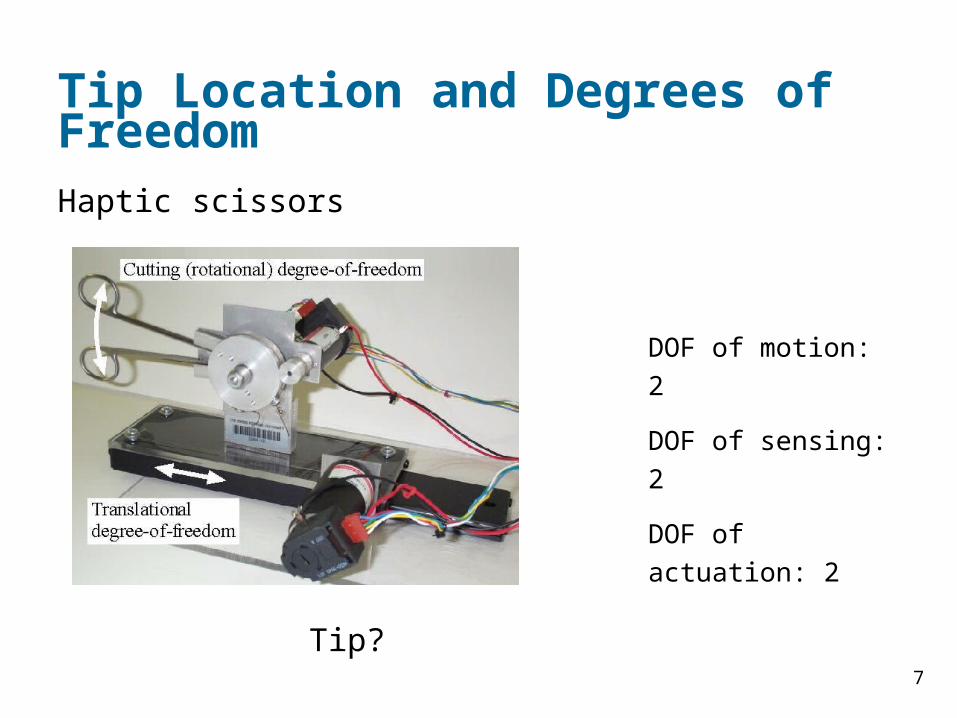
Tip Location and Degrees of Freedom
Tip?
Haptic scissors
DOF of motion: 2
DOF of sensing: 2
DOF of actuation: 2

8
Relation Between Tip Position and Joint Angles(Forward Kinematics)
3
)sin()cos()sin( 333221 lllr
1l
2l 3l
2
1)cos( 1rpx
)sin( 1rpy
)cos()sin()cos( 333221 lllpz
P
0y
0z
0x

9
Encoders
Small discs that have holes in them that can be read by photo sensors. The photo sensors record the number of transitions between light and dark.
Photo detector
Light beam generator
Disc
Initializations:Potentiometers and fixed setting points

10
Relation between Joint Torques and Forces at the tip
Principal of virtual work
Jacobian
.. XF
TT JF
JX
TT JF
FJ T
11
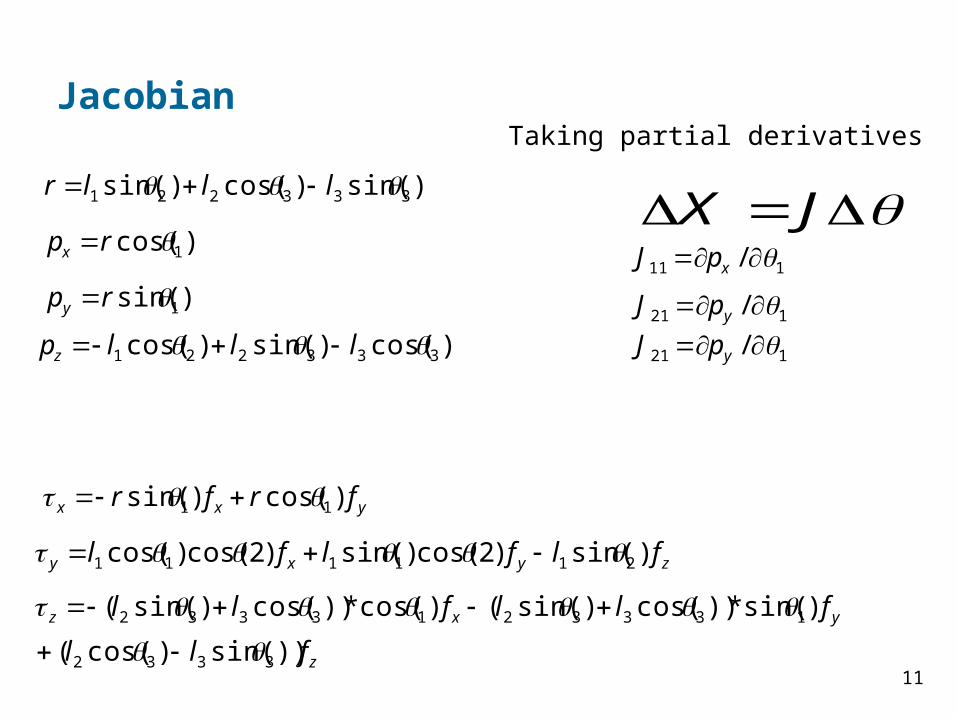
Jacobian
)sin()cos()sin( 333221 lllr
)cos( 1rpx
)sin( 1rpy
)cos()sin()cos( 333221 lllpz
yxx frfr )cos()sin( 11
zyxy flflfl )sin()2cos()sin()2cos()cos( 211111
z
yxz
fll
fllfll
))sin()cos((
)sin(*))cos()sin(()cos(*))cos()sin((
3332
1333213332
111 / xpJ
121 / ypJ
121 / ypJ
JX
Taking partial derivatives

12
Actuators Equations
Torque
Voltage
Input
Ikt
KE
ERIdt
dILV
Current amplifier: I as an input
Voltage amplifier: V as an input

13
Nonidealities of a haptic device
Ideal haptic devices No friction No Inertia High bandwidth
KIFhand
Actual haptic devices
handfriction FFIHGXCXM )(

14
Discussion
High fidelity haptic devices Friction Inertia gravity Device bandwidth Sensors Actuators
15
Tomorrow
Introduction to haptic rendering
References
Introduction to Robotics Mechanics and Control, 2nd Ed., John J. Craig, Addison- Wesley (Chapter 3 and 5.7 to 5.11)