
1 ECEN5807 Intro to Converter Sampled-Data Modeling Introduction to Converter Sampled-Data Modeling...
26
1 ECEN5807 Intro to Converter Sampled-Data Modeling Introduction to Converter Sampled-Data Modeling ECEN 5807 Dragan Maksimović
-
date post
21-Dec-2015 -
Category
Documents
-
view
239 -
download
1
Transcript of 1 ECEN5807 Intro to Converter Sampled-Data Modeling Introduction to Converter Sampled-Data Modeling...

1ECEN5807 Intro to Converter Sampled-Data Modeling
Introduction to Converter Sampled-Data Modeling
ECEN 5807 Dragan Maksimović

2ECEN5807 Intro to Converter Sampled-Data Modeling
Objectives
• Better understanding of converter small-signal dynamics, especially at high frequencies
• Applications– DCM high-frequency modeling– Current mode control– Digital control

3ECEN5807 Intro to Converter Sampled-Data Modeling
Example: A/D and D/A conversion
A/D D/Av(t) vo(t)v*(t)
Analog-to-digital converter
Digital-to-analog converter
t
t
t(n+1)T (n+2)TnT T = sampling period
1/T = sampling frequency
v(t)
v*(t)
vo(t)

4ECEN5807 Intro to Converter Sampled-Data Modeling
Modeling objectives
• Relationships: v to v* to vo
– Time domain: v(t) to v*(t) to vo(t)
– Frequency domain: v(s) to v*(s) to vo(s)
t
t
t(n+1)T (n+2)TnT T = sampling period
1/T = sampling frequency
v(t)
v*(t)
vo(t)

5ECEN5807 Intro to Converter Sampled-Data Modeling
Model
A/D D/Av(t) vo(t)v*(t)
Analog-to-digital converter
Digital-to-analog converter
v(t) vo(t)v*(t)
H
Sampler Zero-order hold
T

6ECEN5807 Intro to Converter Sampled-Data Modeling
Sampling
v(t)v*(t)
Sampler
T
t
t
v(t)
v*(t)
)()()(* nTttvtv
Unit impulse (Dirac)
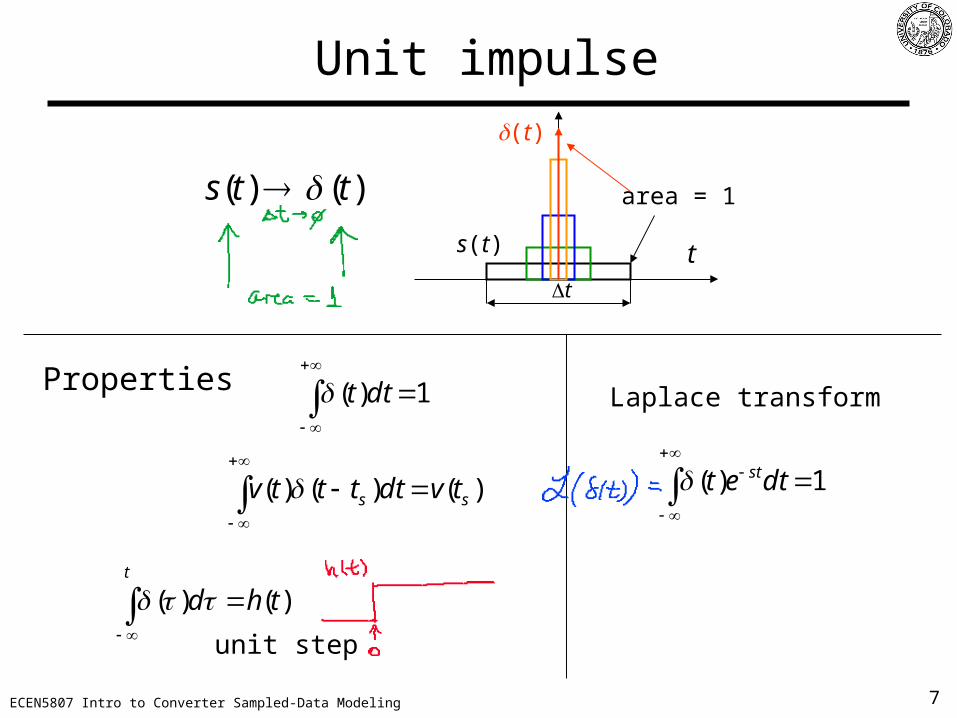
7ECEN5807 Intro to Converter Sampled-Data Modeling
(t)
tt
area = 1
s(t)
)()( tts
Unit impulse
1)( dtt
)()()( ss tvdttttv
Properties
t
thd )()( unit step
Laplace transform
1)( dtet st

8ECEN5807 Intro to Converter Sampled-Data Modeling
Sampling in frequency domain
)()()(* nTttvtv
dtetvsv st)(*)(*
k
sjksvT
sv )(1
)(*
dtetvsv st)()(
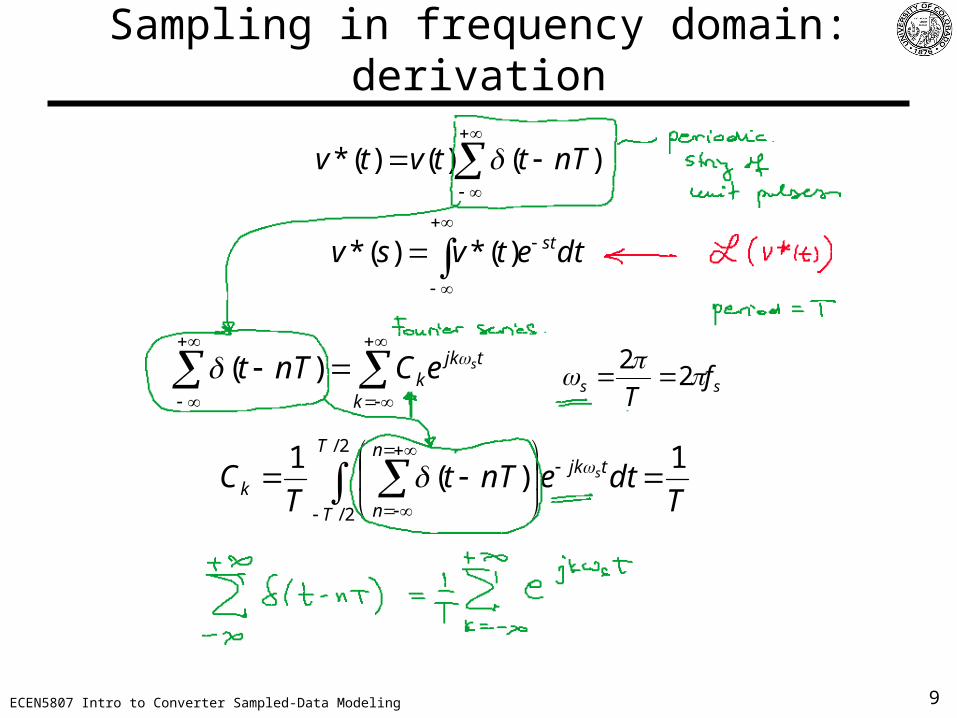
9ECEN5807 Intro to Converter Sampled-Data Modeling
Sampling in frequency domain: derivation
k
tjkk
seCnTt )(ss f
T 2
2
)()()(* nTttvtv
dtetvsv st)(*)(*
TdtenTt
TC tjk
T
T
n
nk
s1
)(1 2/
2/

10ECEN5807 Intro to Converter Sampled-Data Modeling
Sampling in frequency domain: derivation

11ECEN5807 Intro to Converter Sampled-Data Modeling
Aliasing

12ECEN5807 Intro to Converter Sampled-Data Modeling
Zero-order hold
vo(t)v*(t)
H
Zero-order hold
t
t(n+1)T (n+2)TnT T = sampling period
1/T = sampling frequency
v*(t)
vo(t)

13ECEN5807 Intro to Converter Sampled-Data Modeling
Zero-order hold: time domain
vo(t)HZero-order hold
(t)
t
Tt
o dtv )()(

14ECEN5807 Intro to Converter Sampled-Data Modeling
Zero-order hold: frequency domain
vo(t)HZero-order hold
u(t)
t
Tt
o dutv )()(
s
eH
sT
1

15ECEN5807 Intro to Converter Sampled-Data Modeling
Sampled-data system example: frequency domain
k
sjksvT
sv )(1
)(*
v(t) vo(t)v*(t)
H
Sampler Zero-order hold
T
s
eH
sT
1
k
s
sTsT
o jksvsT
esv
s
esv )(
1)(*
1)(
)(1
)( svsT
esv
sT
o
sT
e
v
v sTo
1
Consider only low-frequency signals:
System “transfer function” =
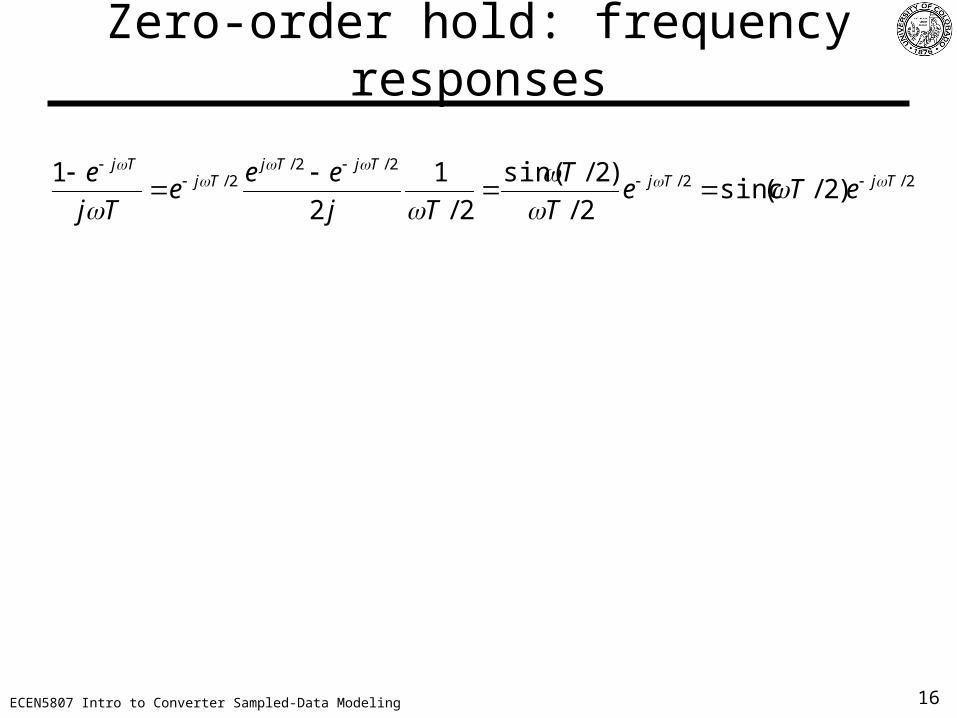
16ECEN5807 Intro to Converter Sampled-Data Modeling
Zero-order hold: frequency responses
2/2/2/2/
2/ )2/(sinc2/
)2/sin(
2/
1
2
1 TjTjTjTj
TjTj
eTeT
T
Tj
eee
Tj
e

17ECEN5807 Intro to Converter Sampled-Data Modeling
102
103
104
105
106
107
-100
-80
-60
-40
-20
0
20
mag
nitu
de [
db]
Zero-Order Hold magnitude and phase responses
102
103
104
105
106
107
-150
-100
-50
0
frequency [Hz]
phas
e [d
eg]
Zero-order hold: frequency responses
sT
eTH
sT
1/
fs = 1 MHz
MATLAB file: zohfr.m

18ECEN5807 Intro to Converter Sampled-Data Modeling
Zero-order hold: 1st-order approximation
p
sT
ssT
e
1
11
p
psT
s
s
e
1
1
1st-order Pade approximation
s
p
f
Tf
1Tp
2

19ECEN5807 Intro to Converter Sampled-Data Modeling
102
103
104
105
106
107
-100
-80
-60
-40
-20
0
20
mag
nitu
de [
db]
Zero-Order Hold magnitude and phase responses
102
103
104
105
106
107
-150
-100
-50
0
frequency [Hz]
phas
e [d
eg]
Zero-order hold: frequency responses
fs = 1 MHz
MATLAB file: zohfr.m

20ECEN5807 Intro to Converter Sampled-Data Modeling
How does any of this apply to converter modeling?
+–
L
C R
+
v
–
vg+–
D vg
Vg d
I d
D i
i
+
_
Gc
d1
VM
vrefu

21ECEN5807 Intro to Converter Sampled-Data Modeling
PWM is a small-signal sampler!
pt
sTd
c
ps ttTd ˆ
uu ˆu
c
PWM sampling occurs at tp (i.e. at dTs, periodically, in each switching period)
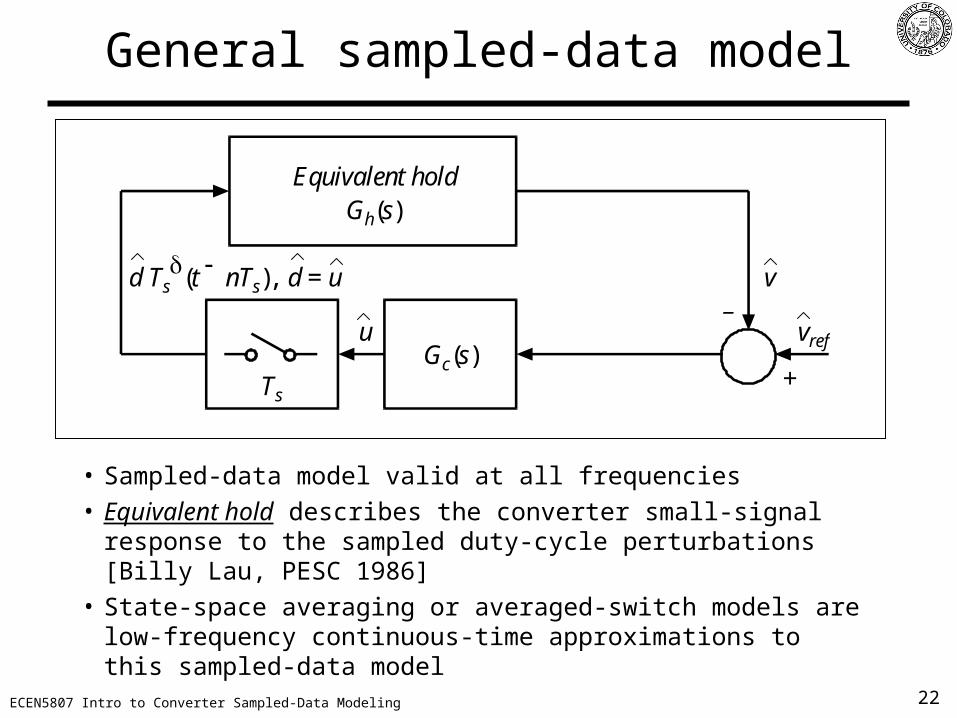
22ECEN5807 Intro to Converter Sampled-Data Modeling
General sampled-data model
vref
+
_
Gc(s)u
v
Ts
Equivalent holdGh(s)
d Ts(t nTs), d = u
• Sampled-data model valid at all frequencies
• Equivalent hold describes the converter small-signal response to the sampled duty-cycle perturbations [Billy Lau, PESC 1986]
• State-space averaging or averaged-switch models are low-frequency continuous-time approximations to this sampled-data model

23ECEN5807 Intro to Converter Sampled-Data Modeling
Application to DCM high-frequency modeling
Ts
dTs d2Ts
iL
c

24ECEN5807 Intro to Converter Sampled-Data Modeling
Application to DCM high-frequency modeling
Ts
dTs d2Ts
iL
c
25ECEN5807 Intro to Converter Sampled-Data Modeling
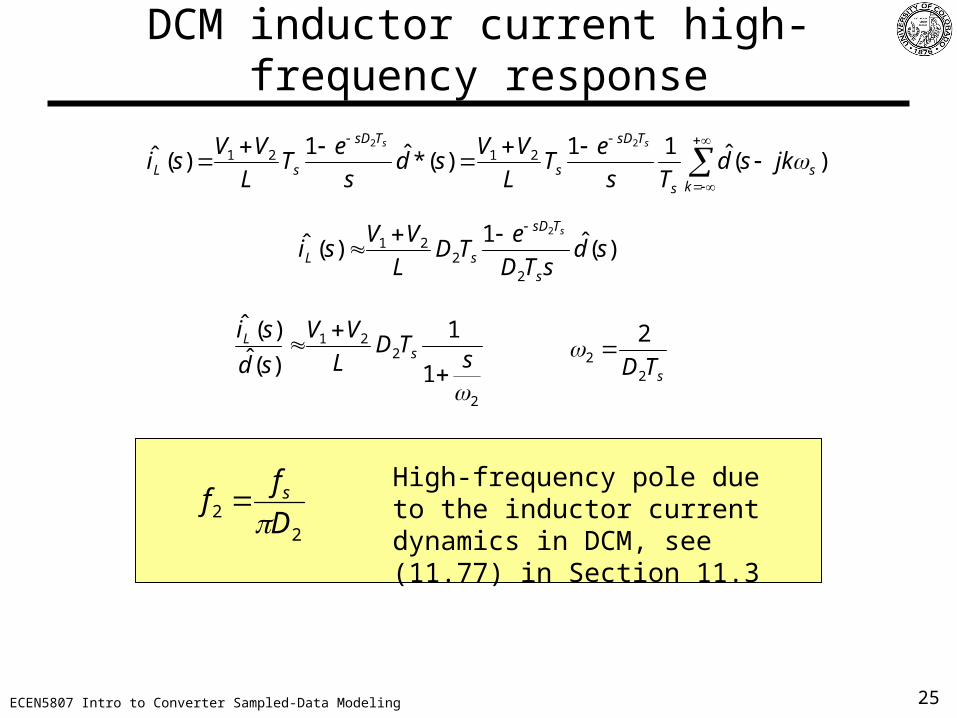
DCM inductor current high-frequency response
k
ss
TsD
s
TsD
sL jksdTs
eT
L
VVsd
s
eT
L
VVsi
ss
)(ˆ11)(*ˆ1
)(ˆ22
2121
)(ˆ1)(ˆ
22
212
sdsTD
eTD
L
VVsi
s
TsD
sL
s
2
221
1
1
)(ˆ)(ˆ
s
TDL
VV
sd
sis
L
sTD22
2
22 D
ff s
High-frequency pole due to the inductor current dynamics in DCM, see (11.77) in Section 11.3
26ECEN5807 Intro to Converter Sampled-Data Modeling
Conclusions
• PWM is a small-signal sampler
• Switching converter is a sampled-data system
• Duty-cycle perturbations act as a string of impulses
• Converter response to the duty-cycle perturbations can be modeled as an equivalent hold
• Averaged small-signal models are low-frequency approximations to the equivalent hold
• In DCM, at high frequencies, the inductor-current dynamic response is described by an equivalent hold that behaves as zero-order hold of length D2Ts
• Approximate continuous-time model based on the DCM sampled-data model correlates with the analysis of Section 11.3: the same high-frequency pole at fs/(D2) is obtained
• Next: current-mode control (Chapter 12)

















![TNT2 Digital Pulse Processor Functionalities TUC control ... · channels sampled by a Flash Analog to Digital Converter (FADC) from (Analog Devices’ AD6645, [5, AD6645]) at up to](https://static.fdocuments.in/doc/165x107/600bc98eeabc935c8a2a32d6/tnt2-digital-pulse-processor-functionalities-tuc-control-channels-sampled-by.jpg)
