1. Der Vektorraum - mathe.tu-freiberg.debernstei/HMI/LinAlg.pdf · KAPITEL 4 Lineare Algebra 1. Der...
26
-
Upload
nguyenmien -
Category
Documents
-
view
213 -
download
0
Transcript of 1. Der Vektorraum - mathe.tu-freiberg.debernstei/HMI/LinAlg.pdf · KAPITEL 4 Lineare Algebra 1. Der...

122

KAPITEL 4
Lineare Algebra
1. Der Vektorraum Rn
Definition 4.1. Der Vektorraum Rn besteht aus allen Spaltenvektoren
der Form ~a =
a1
a2
...
an
und wird von der kanonischen oder nat�urlichen
Basis
~e1 =
1
0...
0
, ~e2 =
0
1...
0
, . . . , ~en =
0
0...
1
.
Das Skalarprodukt zweier Vektoren ~a und ~b ist de�niert als
~a ·~b = a1b1 + a2b2 + . . .+ anbn
Der Vektorraum Rn versehen mit diesem Skalarprodukt hei�t Euklidi-
scher Raum. Der Vektor ~a besitzt die L�ange (den Betrag, die Norm)
|~a| :=√~a · ~a =
√√√√ n∑j=1
a2j
und der Winkel zwischen den Vektoren ~a und ~b wird de�niert als
cos ^(~a,~b) :=~a ·~b|~a| · |~b|
Beispiel 4.1. Gram-Schmidtsches Orthonormierungsverfahren. Es gilt
Satz 4.1. Sind die Vektoren ~v1, ~v2, . . . , ~vn des Rnpaarweise orthogonal,
d.h. gilt ~vi · ~vj =
{1, i = j,
0, i 6= j,so sind die Vektoren linear unabh�angig.
123

124 4. LINEARE ALGEBRA
Beweis: Es sei
α1~v1 + . . .+ αn~vn = ~0⇒ (α1~v1 + . . .+ αn~vn) · ~vj = αj~vj · ~vj = αj|~v2j | = 0. #
Satz 4.2. (Gram-Schmidtsches Orthonormierungsverfahren) Es sei-
en ~b1, . . . , ~bk ∈ Rn (k ≤ n) linear unabh�angige Vektoren des Rn. Hieraus
wird nun eine Orthonormalbasis ~c1, . . . , ~ck ∈ Rn (k ≤ n) der linearen
H�ulle Lin (~b1, . . . , ~bk) konstruiert:
(1) Man setzt
~c1 =1
|~b1|~b1.
(2) Der zweite Vektor soll nun zu ~c1 bzw. ~b1 orthogonal sein. Deshalb
zerlegt man den Vektor ~b2 in die zu ~c1 parallele Komponente =
Projektion von ~b2 auf ~c1 und den dazu orthogonalen Vektor:
~c ′2 = ~b2 − (~b2 · ~c1)~c1und normiert
~c2 =~c ′2|~c ′2|
.
(3) Nun wird der Vektor ~c3 aus ~b3 so konstruiert, dass ~c3 orthogonal
zu ~c1 und ~c2 ist, d.h. wir bilden zun�achst die Projektionen von~b3 auf ~c1 und ~c2 und berechnen dann
~c ′3 = ~b3 − (~b3 · ~c1)~c1 − (~b3 · ~c2)~c2und normieren
~c3 =~c ′3|~c ′3|
.
(4) Man f�ahrt so fort bis
~c ′k = ~bk −k−1∑i=1
(~bk · ~ci)~ci
und normiert
~ck =~c ′k|~c ′k|
.
Bemerkung 4.1. In jedem Schritt ist ein Element ~ci konstruierbar. W�are
dem nicht so, so w�are der Vektor ~bi linear abh�angig von ~c1, . . . ,~ci−1 und damit~b1, . . . ,~bi−1. Das ist aber nach Voraussetzung ausgeschlossen!

1. DER VEKTORRAUM Rn 125
u
v
vu
vu┴
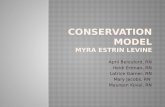
Sind nur 2 linear unabh�angige Vektoren ~u, ~v zu orthogonalisieren, so entsteht
das orthogaonale System durch ~u1 = ~u und ~u2 = ~v⊥~u der orthogonale Vektor zur
Projektion von ~v auf ~u. Durch Normieren der Vektoren erh�alt man orthonor-
male Vektoren.
E
u1
u2
u3
w
wu1
wu2
w┴
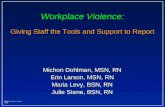
Im Fall von 3 Vektoren ~u, ~v, ~w gewinnt man zun�achst 2 orthogonale bzw. ortho-
normale Vektoren von ~u, ~v wie bereits beschrieben. Der dritte Vektor ~w l�asst sich
in einen Anteil, der in der von ~u und ~v aufgespannten Ebene liegt, und einen
dazu orthogonalen Anteil aufspalten. Dieser orthogonale Anteil ist die gesuchte
dritte Richtung, durch Normieren erh�alt man den 3. normierten Vektor.
Es seien die folgenden 3 Vektoren gegeben:
~v1 =
1
2
0
3
, ~v2 =
4
0
5
8
, ~v3 =
8
1
5
6
.
Man benutze das Gram-Schmidtsche-Orthonormierungsverfahren, um eine Ba-
sis f�ur Lin (~v1, ~v2, ~v3) zu konstruieren.

126 4. LINEARE ALGEBRA
(1) ~u1 := 1|~v1|~v1 = 1√
14
1
2
0
3
.
(2) ~u′2 := ~v2 − (~v2)~u1 = ~v2 − (~v2 · ~u1)~u1 = ~v2 − 1√14
2 · 28
1
2
0
3
=
4− 2
0− 4
5− 0
8− 6
=
2
−4
5
2
und wir erhalten ~u2 = 1|~u′
2|~u′2 = 1
7
2
−4
5
2
.
(3) ~u′3 := ~v3 − (~v3)~u1 − (~v3)~u2 = ~v3 − (~v3 · ~u1)~u1 − (~v3 · ~u2)~u2 =
8
1
5
6
− 1√14
2 ·
28
1
2
0
3
− 172 · 49
2
−4
5
2
=
8− 2− 2
1− 4 + 4
5 + 0− 5
6− 6− 2
=
4
1
0
−2
und wir erhalten
~u3 = 1|~u′
3|~u′3 = 1√
21
4
1
0
−2
.

2. LINEARE ABBILDUNGEN UND KOORDINATENDARSTELLUNGEN 127
2. Lineare Abbildungen und Koordinatendarstellungen
2.1. Lineare Abbildungen und ihre Basisdarstellung. Seien V, W Vektorr�aume
�uber R. Mit einer Abbildung f : V → W ("von V in W\) wird jedem Vektor ~v ∈ V
ein eindeutig bestimmter Vektor ~w = f(~v) ∈ W, das sogenannte Bild von ~v unter f
zugeordnet.
Definition 4.2. Eine Abbildung hei�t linear, wenn gilt
L.1: f ist homogen; d.h. f(α~v) = α f(~v) f�ur alle α ∈ R, ~v ∈ V,L.2: f ist additiv; d.h. f(~u+ ~v) = f(~u) + f(~v) f�ur alle ~u, ~v ∈ V.
Man nennt lineare Abbildungen auch lineare Transformationen oder
auch lineare Operatoren.
Beispiele f�ur lineare Abbildungen:
Beispiel 4.2. Die Multipliaktion mit einer festen m× n-Matrix A
l : Rn → Rm, l(~x) := A~x.
Beispiel 4.3. Der Di�erentialoperator
d
dx: C1(I)→ C0(I),
d
dxf(x) := f ′(x).
Mit C0(I) bzw. C1(I) bezeichnet man den Vektorraum aller auf dem Intervall
I ⊆ R stetigen bzw. stetig di�erenzierbaren Funktionen.
Beispiel 4.4. Das Integral
f →∫ b
a
f(x) dx, f ∈ C0(I).
Beispiel 4.5. Die Werksto�beanspruchung eines elastischen K�orpers, auf den
von au�en Kr�afte wirken, wird in der linearen Elastostatik durch den Span-
nungstensor S (3× 3- Matrix) beschrieben.
Bemerkung 4.2. Da zu linearen Abbildungen f, g : V → W und α ∈ R, dieSumme
f + g : V → W, (f + g)(~v) := f(~v) + g(~v)
und das α-fache
αf : V → W, (αf)(~v) := αf(~v)
wieder lineare Abbildungen sind, bilden die linearen Abbildungen selbst wieder
einen Vektorraum
L(V, W ) := {f ; f : V → W ist linear.}

128 4. LINEARE ALGEBRA
Im folgenden sei V = W = Rn.Wir betrachten also nur noch lineare Abbildungen
des Rn in sich.
Satz 4.3. Gegeben sei eine lineare Abbildung f : Rn → Rn. Mit der
Matrix F = (f(~e1, f(~e2), . . . , f(~en)), deren Spalten aus den Bildern der
nat�urlichen Basisvektoren bestehen, gilt
f(~x) = F~x.
Man nennt F die Abbildungsmatrix von f bez�uglich der nat�urlichen Ba-
sis.
Beweis: F�ur ~x = x1~e1 + . . .+ xn~en folgt
f(~x) = f
(n∑
i=1
xi~ei
)=
n∑i=1
xi f(~ei) = F~x. #
Bemerkung 4.3. Man beachte, dass die Matrix F die Abbildungsmatrix der
linearen Abbildung bzgl. der nat�urlichen Basis ist. In einer anderen Basis sieht
die Matrix anders aus!
Beispiel 4.6. Die Abbildung
f : R3 → R3, f((x, y, z)T ) = (x, y + 2z, z)T
ist linear, da
αf
x1
y1
z1
+ βf
x2
y2
z2
= α
x1
y1 + 2z1
z1
+ β
x2
y2 + 2z2
z2
=
αx1 + βx2
αy1 + βy2 + 2(αz1 + βz2)
αz1 + βz2
= f
αx1 + βx2
αy1 + βy2
αz1 + βz2
.
Die Abbildung besitzt bez�uglich der Basis~e1 =
1
0
0
, ~e2 =
0
1
0
, ~e3 =
0
0
1
die Abbildungsmatrix
F = (f(~e1) f(~e2) f(~e3)) =
1 0 0
0 1 2
0 0 1

2. LINEARE ABBILDUNGEN UND KOORDINATENDARSTELLUNGEN 129
und damit ist
f(~x) = f((x, y, z)T ) =
1 0 0
0 1 2
0 0 1
~x =
1 0 0
0 1 2
0 0 1
x
y
z
=
x
y + 2z
z
.
Definition 4.3. Eine Basis B = {~b1, ~b2, . . . , ~bn} hei�t orthogonal, wenn
die Vektoren ~bi, i = 1, 2, . . . , n, paarweise orthogonal sind, d.h.
~bi ·~bj = 0 f�ur i 6= j.
Die Basis B = {~b1, ~b2, . . . , ~bn} hei�t orthonormal, wenn sie orthogonal
ist und alle Basisvektoren normiert sind.
Beispiel 4.7. Die nat�urliche Basis ist orthonormal.
Definition 4.4. Eine n× n-Matrix hei�t orthogonal, wenn gilt:
ATA = E, (also AT = A−1).
Satz 4.4. F�ur eine n× n-Matrix A sind �aquivalent
(1) A ist orthogonal.
(2) Die Abbildung T (~x) = A~x ist isometrisch (l�angentreu), d.h.
|A~x| = |~x|, f�ur alle ~x ∈ Rn.
(3) Die Abbildung T (~x) = A~x ist kongruent (l�angen- und winkeltreu),
d.h., T erh�alt das Skalarprodukt
(A~x) · (A~y) = ~xTATA~y = ~xT~y = ~x · ~y, f�ur alle ~x, ~y ∈ Rn.
(4) Die Spalten (Zeilen) von A bilden eine orthonormale Basis des
Rn.
Beweis: Wir beweisen nur (1) ⇐⇒ (4) :
ATA = E ⇔
~aT
1
~aT2...
~aTn
( ~a1 ~a2 . . . ~an
)= E ⇐⇒ ~aT
i ~aj = ~ai·~aj =
{0, i 6= j,
1, i = j.#

130 4. LINEARE ALGEBRA
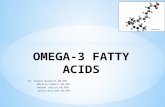
Beispiel 4.8. Drehungen in der Ebene um den Nullpunkt lauten in kartesi-
schen Koordinaten:
d : R2 → R2, d
(x
y
)=
(x cosϕ− y sinϕ
x sinϕ+ y cosϕ
),
mit dem Drehwinkel ϕ, wie man sich leicht �uberzeugt, ist wegen |d(~x)| = |~x| :
~x =
(x
y
)=
(|~x| cosψ
|~x| sinψ
)und
d(~x) =
(x′
y′
)=
(|~x| cos(ϕ+ ψ)
|~x| sin(ϕ+ ψ)
)=
(|~x|(cosϕ · cosψ − sinϕ · sinψ)
|~x|(sinϕ · cosψ + cosϕ · sinψ)
)
=
(x cosϕ− y sinϕ
x sinϕ+ y cosϕ
)= (cosϕ) ~x+ (sinϕ) ~x⊥, ~x⊥ =
(−yx
)
xx'
y
y'
ψφ x
d x
cos xφ
sin xφ ┴
Die Abbildung d ist linear mit der orthogonalen Abbildungsmatrix
D =
(cosϕ − sinϕ
sinϕ cosϕ
), detD = 1.

3. EIGENWERTE UND EIGENVEKTOREN 131
3. Eigenwerte und Eigenvektoren
Wozu ben�otigt man Eigenwerte und Eigenvektoren?
• Diagonalmatrizen sind leicht zu handhaben. Eigenvektoren werden
zur Diagonalisierung von Matrizen verwendet. (siehe sp�ater)
• Zur Analyse von Quadriken bzw. quadratischen Formen. Darauf ge-
hen wir nicht ein.
• F�ur die Langzeitvorhersage von Wetter oder auch der Entwicklung
einer Population basierend auf Wahrscheinlichkeitsmatrizen bzw. so-
genannten Markovschen Ketten. Sollte in der Statistik/Stochastik
behandelt werden.
• F�ur stochastische Modelle.
• Matrizen repr�asentieren lineare Abbildung (Drehung, Scherung,
Spiegelung). Eigenvektoren geben die Geraden an, die dabei erhalten
bleiben. Und Strecken auf diesen Geraden werden um die Eigenwerte
gestreckt bzw. gestaucht.
• Invarianten physikalischer Systeme: Eigenfrequenzen, Eigenformen
und gegebenenfalls auch D�ampfungscharakteristik eines schwingf�ahi-
gen Systems, Knicklast eines Knickstabs (siehe Balkentheorie),
Hauptspannungen in der Festigkeitslehre: Umrechnung der Span-
nungen in ein Koordinatensystem, in dem es keine Schubspannun-
gen gibt. Eigenwerte spielen in der Quantenmechanik eine besondere
Rolle.
• Anwendung in der Bildverarbeitung: In der Bildverarbeitung wer-
den Eigenvektoren gerne benutzt, um Objekte auszurichten. Wenn
man beispielsweise Mikroskopbilder von ellipsenf�ormigen Bakterien
hat, gibt der gr�o�te Eigenvektor die Lage der Hauptachse an (daher
auch Hauptachsentransformation). Mit dieser Hauptachse k�onnen al-
le Bilder gleich ausgerichtet (gedreht) werden. Die Eigenwerte geben
die Verteilung entlang der Achsen an. Sie sind unabh�anging von der
Ausrichtung, so da� man sie zum Vermessen oder Klassi�zieren be-
nutzten kann, ohne das Bild vorher zu drehen.
• Systeme gew�ohnlicher Di�erentialgleichungen 1. Ordnung.

132 4. LINEARE ALGEBRA
Definition 4.5. Eine Zahl λ ∈ C hei�t Eigenwert der Matrix einer reellen
oder komplexen n×n-Matrix A, wenn es mindestens einen Spaltenvektor~b ∈ Cn, ~b 6= ~0, gibt mit
A~b = λ~b.
Jeder Vektor ~b 6= ~0, der diese Gleichung erf�ullt, hei�t Eigenvektor von A
zum Eigenwert λ.
3.1. Bestimmung von Eigenwerten. Wenn λ ein Eigenwert der Matrix A ist,
dann gibt es einen Spaltenvektor ~b 6= ~0 mit
A~b = λ~b⇔ (A− λE)~b = ~0.
Folglich besitzt das Gleichungssystem (16) nichttriviale L�osungen und damit ist die
Determinante der Koe�zientenmatrix gleich Null, also det (A − λE) = 0. Umge-
kehrt, ist diese Determinate gleich Null, dann hat das Gleichungssystem nichttriviale
L�osungen (vgl. Rechenregeln f�ur Determinanten (2.7) bzw. Cramersche Regel 2.9).
Insgesamt haben wir damit, λ ist ein Eigenwert der Matrix A genau dann wenn
gilt:
det (A− λE) = 0.
Deshalb
Zur Berechnung der Eigenwerte einer n×n-Matrix betrachtet man (mit einer
Variablen λ) das charakteristische Polynom von A
χA(λ) := det (A− λE).
Die Nullstellen des charakteristischen Polynoms sind die Eigenwerte der Ma-
trix A.
Beispiel 4.9. Wir betrachten die Matrix
A =
0 −1 0
−1 −1 1
0 1 0
, es ist A− λE =
−λ −1 0
−1 −1− λ 1
0 1 −λ
und damit
det (A− λE) = (−λ)(−1− λ)(−λ) + 0 + 0− 0− (−λ)− (−λ) = −λ2 − λ3 + 2λ = 0
⇔ λ2 + λ3 − 2λ = λ(λ2 + λ− 2) = 0

3. EIGENWERTE UND EIGENVEKTOREN 133
und ergibt die Nullstellen λ1 = 0 sowie
λ2 + λ− 2 = 0 ⇐⇒ λ2,3 = −1
2±√
1
4+ 2
und die Nullstellen λ2 = 1 und λ3 = −2.
Wenn man die Determinante det (A−λE) = χA(λ) berechnet und nach Potenzen
von λ ordnet, so erh�alt man
χA(λ) = (−λ)n + (spurA)(−λ)n−1 + . . .+ detA,
wobei spurA = a11 +a22 + . . .+ann die Summe der Elemente der Hauptdiagonale ist.
Beispiel 4.10. F�ur obige Matrix
A =
0 −1 0
−1 −1 1
0 1 0
ist spurA = 0− 1 + 0 = −1 und detA = 0, was auch aus dem charakteristischen
Polynom
χA(λ) = (−λ)3 + (−1)λ2 + 2λ+ 0
ablesbar ist.
3.2. Algebraische Vielfachheit. Das charakteristische Polynom
χA(λ) = (−λ)n + (spurA)(−λ)n−1 + . . .+ detA
ist folglich ein Polynom n-ten Grades (f�ur eine n × n-Matrix) und hat deshalb n
nicht notwendigerweise voneinander verschiedene komplexe Nullstellen λ1, λ2, . . . λn.
D.h. wir haben die Nullstelle λ1 mit der Vielfachheit k1, die Nullstelle λ2 mit der
Vielfachheit k2, . . . , die Nullstelle λr mit der Vielfachheit kr. Dabei kann man die
Eigenwerte der Gr�o�e nach ordnen λ1 ≤ λ2 ≤ . . . λr und es ist k1 + k2 + . . .+ kr = n.
Definition 4.6. Man bezeichnet die Vielfachheit ki der Nullstelle λi als
die algebraische Vielfachheit des Eigenwertes λi.
3.3. Eigenvektoren, Eigenraume und geometrische Vielfachheit. Hat man
nun alle Eigenwerte der Matrix A bestimmt, so werden dann die Eigenvektoren be-
rechnet, d.h. man l�ost das Gleichungssystem
(A− λiE)~b = ~0, i = 1, 2, . . . , r.
Da die Determinate der Koe�zientenmatrix gleich Null ist, besitzt das Gleichungs-
system nichttriviale L�osungen mit n− Rang (A− λiE) freien Parametern.

134 4. LINEARE ALGEBRA
Definition 4.7. Jede L�osung ~b 6= ~0 von (A−λiE)~b = ~0 ist ein Eigenvektor
zum Eigenwert λi.
V (λi) = {~b ∈ Cn : (A− λiE)~b = ~0} = Kern (A− λiE)
hei�t Eigenraum zum Eigenwert λi, (1 ≤ i ≤ r). Man nennt die Di-
mension des Eigenraumes DimV (λi) die geometrische Vielfachheit des
Eigenwertes λi.
Die algebraische und die geometrische Vielfachheit stimmen i. Allg. nicht �uberein!
Wie man leicht sieht ist:
DimV (λi) = n− Rang (A− λiE).
Bemerkung 4.4. Da die Eigenwerte die Nullstellen des charakteristischen
Polynoms sind, gilt
χA(λ) = (−λ)n + (spurA)(−λ)n−1 + . . .+ detA
= (λ− λ1)k1(λ− λ2)
k2 · · · (λ− λr)kr
= (−λ)n + (k1λ1 + k2λ2 + . . .+ krλr) + . . .+ λk11 λ
k22 · · ·λkr
r
mit den algebraischen Vielfachheiten ki, i = 1, 2, . . . , r. Hieraus liest man ab,
spurA = k1λ1 + k2λ2 + . . .+ krλr
detA = λk11 λ
k22 · · ·λkr
r
Diese Formeln sind n�utzlich f�ur Rechenkontrollen, au�erdem gestattet insbe-
sondere die 2. Formel Eigenwerte zu erraten, da die Eigenwerte Teiler des
Absolutgliedes des charakteristischen Polynoms sind.
Beispiel 4.11. Es sei
A =
5 4 2
4 5 2
2 2 2
.

3. EIGENWERTE UND EIGENVEKTOREN 135
Wir bestimmen die Eigenwerte als Nullstellen des charakteristischen Polynoms:
det (A− λE) =
∣∣∣∣∣∣∣5− λ 4 2
4 5− λ 2
2 2 2− λ
∣∣∣∣∣∣∣=
~z1 − ~z2
∣∣∣∣∣∣∣1− λ −1 + λ 0
4 5− λ 2
2 2 2− λ
∣∣∣∣∣∣∣=
~s2 − ~s1
∣∣∣∣∣∣∣1− λ 0 0
4 9− λ 2
2 4 2− λ
∣∣∣∣∣∣∣ = (1− λ)[(9− λ)(2− λ)− 8]
= (1− λ)[18− 11λ+ λ2 − 8] = (1− λ)(λ− 10)(λ− 1) = −(λ− 10)(λ− 1)2.
Folglich hat die 3×3-Matrix A den Eigenwert λ1 = 1 mit der algebraischen Viel-
fachheit k1 = 2 und den Eigenwert λ2 = 10 mit der algebraischen Vielfachheit
k2 = 1.
Wir bestimmen nun die Eigenvektoren, zun�achst f�ur λ1 = 1. Dazu l�osen wir das
Gleichungssystem
(A− λ1E)~b = ~0⇔
4 4 2
4 4 2
2 2 1
b1
b2b3
=
0
0
0
,
das die L�osung b1 = s, b2 = t, b3 = −2s− 2t mit t, s ∈ R besitzt. Folglich ist der
Eigenraum zum Eigenvektor λ1 = 1 :
V (λ1) = V (1) =
s
t
−2s− 2t
= s
1
0
−2
+ t
0
1
−2
, s, t ∈ R
.
Die Vektoren
1
0
−2
und
0
1
−2
bilden eine Basis von V (1). Deshalb hat
der Eigenraum die Dimension 2 und der Eigenwert λ1 = 1 die geometrische
Vielfachheit 2.
Nun zum Eigenwert λ2 = 10.
(A− λ2E)~b = ~0⇔
−5 4 2
4 −5 2
2 2 −8
b1
b2b3
=
0
0
0

136 4. LINEARE ALGEBRA
und wird mittels Gau�-Algorithmus umgeformt zu −5 4 2 0
4 −5 2 0
2 2 −8 0
≈12~z3
−5 4 2 0
4 −5 2 0
1 1 −4 0
≈
~z1 + 5~z3
~z2 − 4~z3
0 9 18 0
0 −9 −18 0
1 1 −4 0
≈ 0 1 −2 0
0 1 −2 0
1 1 −4 0
und hat die L�osung b3 = r, b2 = 2r und b1 = −b2 + 4b3 = −2r + 4r = 2r mit r ∈ RFolglich ist der Eigenraum zum Eigenvektor λ2 = 10 :
V (λ2) = V (10) =
2r
2r
r
= r
2
2
1
, r ∈ R
.
Eine Basis f�ur den Eigenraum V (10) ist der Vektor
2
2
1
und die Dimension
des Eigenraumes ist damit 1. Folglich hat der Eigenwert λ2 = 10 die geome-
trische Vielfachheit 1. In diesem Beispiel stimmen die algebraische und die
geometrische Vielfachheit der Eigenwerte �uberein, dass ist i.Allg. aber nicht so.
In diesem Beispiel stimmen die algebraische und die geometrische Vielfachheit
der Eigenwerte �uberein, dass ist i.Allg. aber nicht so.
Beispiel 4.12. Gegeben sei
A =
(a b
c d
)∈ R2×2.
Es werden zun�achst die Eigenwerte als Nullstellen des charakteristischen Poly-
noms bestimmt:
χA(λ) =
∣∣∣∣∣ a− λ b
c d− λ
∣∣∣∣∣ = (a− λ)(d− λ)− cb
= λ2 − (a+ d)λ+ (ad− bc)= λ2 − (spurA)λ+ detA = (λ− λ1)(λ− λ2) = 0
Anschlie�end wird f�ur jeden Eigenwert λi, i = 1, 2, der Eigenraum und eine
Basis des Eigenraums bestimmt. Dazu l�ost man das Gleichungssystem(a− λi b
c d− λi
)(b1b2
)=
(0
0
).
Im Fall n = 2 gibt es somit 4 verschiedene F�alle:
(1) λ1, λ2 ∈ R, λ1 6= λ2,

3. EIGENWERTE UND EIGENVEKTOREN 137
(2) λ1 = λ2 ∈ R algebraische = geometrische Vielfachheit = 2,
(3) λ1 = λ2 ∈ R algebraische Vielfach. = 2 6= geometrische Vielfachheit = 1,
(4) λ2 = λ1 ∈ C, λ1 6∈ R.Es seien konkrete Zahlenbeispiele f�ur alle 4 F�alle angegeben:
Es sei
A =
(1 2
2 1
).
Wir bestimmen die Eigenwerte
χA(λ) = det (A−λE) =
(1− λ 2
2 1− λ
)= (1−λ)2−4 = 1−2λ+λ2−4 = λ2−2λ−3 = 0
hat die Nullstellen:
λ1,2 = 1±√
1− (−3) = 1± 2.
Folglich hat A die beiden Eigenwerte λ1 = −1 und λ2 = 3. Die algebraische
Vielfachheit von λ1 = −1 und λ2 = 3 ist 1. Wir bestimmen nun die Eigenr�aume:
F�ur λ1 = −1 :
(A− λ1E)
(x
y
)=
(2 2
2 2
)(x
y
)=
(0
0
)ergibt die L�osung y = t und x = −t, d.h.
V (λ1) = V (−1) =
{(−tt
)= t
(−1
1
), t ∈ R
}.
Eine Basis f�ur den Eigenraum V (−1) ist der Vektor
(−1
1
)und die Dimension
des Eigenraumes ist damit 1. Folglich hat der Eigenwert λ1 = −1 die geometri-
sche Vielfachheit 1. Nun f�ur λ2 = 3 :
(A− λ2E)
(x
y
)=
(−2 2
2 −2
)(x
y
)=
(0
0
)ergibt die L�osung y = t und x = t, d.h.
V (λ2) = V (3) =
{(t
t
)= t
(1
1
), t ∈ R
}.
Eine Basis f�ur den Eigenraum V (3) ist der Vektor
(1
1
)und die Dimension
des Eigenraumes ist damit 1. Folglich hat der Eigenwert λ2 = 3 die geometrische
Vielfachheit 1.
Es sei
A =
(3 0
0 3
).

138 4. LINEARE ALGEBRA
Wir bestimmen die Eigenwerte
χA(λ) = det (A− λE) =
(3− λ 0
0 3− λ
)= (3− λ)2 = 0
hat die Nullstelle:
λ1,2 = 3.
Folglich hat A die beiden Eigenwerte λ = λ1 = λ2 = 3. Die algebraische Viel-
fachheit von λ = 3 ist 2. Wir bestimmen nun den Eigenraum:
F�ur λ = 3 :
(A− λE)
(x
y
)=
(0 0
0 0
)(x
y
)=
(0
0
)ist erf�ullt f�ur alle (x, y)T ∈ R2, d.h. V (3) = R2 und der Eigenraum hat die
Dimension 2. D.h. der Eigenwert λ = 3 hat die algebraische und geometrische
Vielfachheit 2.
Es sei
A =
(2 1
0 2
).
Wir bestimmen die Eigenwerte
χA(λ) = det (A− λE) =
(2− λ 1
0 2− λ
)= (2− λ)2 = 0
hat die Nullstelle:
λ1,2 = 2.
Folglich hat A die beiden Eigenwerte λ = λ1 = λ2 = 2. Die algebraische Viel-
fachheit von λ = 2 ist 2. Wir bestimmen nun den Eigenraum:
F�ur λ = 2 :
(A− λE)
(x
y
)=
(0 1
0 0
)(x
y
)=
(0
0
)und der Eigenraum ist
V (λ) = V (2) =
{(t
0
)= t
(1
0
), t ∈ R
}.
Eine Basis f�ur den Eigenraum V (2) ist der Vektor
(1
0
)und die Dimension
des Eigenraumes ist damit 1. Folglich hat der Eigenwert λ = 2 die geometrische
Vielfachheit 1.
Es sei
A =
(cosϕ − sinϕ
sinϕ cosϕ
)

3. EIGENWERTE UND EIGENVEKTOREN 139
Bestimmung der Eigenwerte:
χA(λ) = det (A− λE) = det
(cosϕ− λ − sinϕ
sinϕ cosϕ− λ
)= (cosϕ− λ)2 + sin2 ϕ = 1− 2λ cosϕ+ λ2 = 0
f�ur
λ1,2 = cosϕ±√
cos2 ϕ− 1 = cosϕ± i sinϕ.
Falls ϕ 6= kπ, k ∈ Z gibt es keine reellen Eigenwerte und damit auch keine
reellen Eigenvektoren. Die komplexen Eigenr�aume sind: F�ur λ1 = cosϕ+ i sinϕ :
(A− λ1E)
(x
y
)=
(cosϕ− cosϕ− i sinϕ − sinϕ
sinϕ cosϕ− cosϕ− i sinϕ
)(x
y
)
= sinϕ
(−i −1
1 −i
)(x
y
)=
(0
0
)und hat die L�osung y = t und x = it, und der Eigenraum ist
V (λ1) = V (cosϕ+ i sinϕ) =
{(it
t
)= t
(i
1
), t ∈ C
}.
Eine Basis f�ur den Eigenraum V (cosϕ + i sinϕ) ist der Vektor
(i
1
). Analog
erh�alt man f�ur λ2 = cosϕ− i sinϕ :
(A− λ2E)
(x
y
)=
(cosϕ− cosϕ+ i sinϕ − sinϕ
sinϕ cosϕ− cosϕ+ i sinϕ
)(x
y
)
= sinϕ
(i −1
1 i
)(x
y
)=
(0
0
)und hat die L�osung y = t und x = −it, und der Eigenraum ist
V (λ) = V (cosϕ+ i sinϕ) =
{(−itt
)= t
(−i1
), t ∈ C
}.
Eine Basis f�ur den Eigenraum V (cosϕ− i sinϕ) ist der Vektor
(−i1
).
Beispiel 4.13. Es sei
A =
5 −7 7
4 −3 4
4 −1 2

140 4. LINEARE ALGEBRA
Bestimmung der Eigenwerte
det (A− λE) =
∣∣∣∣∣∣∣5− λ −7 7
4 −3− λ 4
4 −1 2− λ
∣∣∣∣∣∣∣= (5− λ)(−3− λ)(2− λ)− 16 · 7− 28 + 28(3 + λ) + 4(5− λ) + 28(2− λ)
= (−15− 2λ+ λ2)(2− λ)− 112− 28 + 28 · 5 + 20− 4λ
= −30− 4λ+ 2λ2 + 15λ+ 2λ2 − λ3 − 140 + 140 + 20− 4λ
= −λ3 + 4λ2 + 7λ− 10 = 0.
Wir m�ussen den ersten Eigenwert"erraten\. Man �ndet schnell, dass λ1 = 1
ein Eigenwert ist, die �ubrigen Eigenwerte �ndet man durch abdividieren:
(−λ3+ 4λ2+ 7λ− 10) : (λ− 1) = −λ2 + 3λ+ 10
−λ3 + λ2
3λ2 + 7λ
3λ2 − 3λ
10λ− 10
10λ− 10
0
Folglich ergeben sich die beiden anderen Eigenwerte aus
λ2 − 3λ+ 10 = 0
zu λ2,3 =3
2±√
9
4+ 10 =
3
2± 7
2,
also λ2 = 5 und λ3 = −2. Die dazugeh�origen Eigenvektoren und Eigenr�aume
sind f�ur λ1 = 1 :
(A− λ1E)~x = ~0 ⇐⇒
4 −7 7 0
4 −4 4 0
4 −1 1 0
≈
~z1 − ~z3
~z2 − ~z3
0 −6 6 0
0 −3 3 0
4 −1 1 0
≈ 0 −1 1 0
0 −1 1 0
4 −1 1 0
.
Damit ist x3 = x2 = t und x1 = 14(t − t) = 0. Der Eigenraum zum Eigenvektor
λ1 = 1 ist
V (λ1) = V (1) =
0
t
t
= t
0
1
1
, t ∈ R
.

3. EIGENWERTE UND EIGENVEKTOREN 141
F�ur λ2 = 5 :
(A− λ2E)~x = ~0 ⇐⇒
0 −7 7 0
4 −8 4 0
4 −1 −3 0
≈~z2 − ~z4
0 −7 7 0
0 −7 7 0
4 −1 −3 0
Damit ist x3 = x2 = t und x1 = 1
4(t + 3t) = t. Der Eigenraum zum Eigenvektor
λ2 = 5 ist
V (λ2) = V (5) =
t
t
t
= t
1
1
1
, t ∈ R
.
F�ur λ3 = −2 :
(A− λ3E)~x = ~0 ⇐⇒
7 −7 7 0
4 −1 4 0
4 −1 4 0
≈ 1 −1 1 0
4 −1 4 0
4 −1 4 0
≈
~z2 − ~z3
1 −1 1 0
0 0 0 0
4 −1 4 0
≈ 1 −1 1 0
0 0 0 0
0 3 0 0
≈ 1 0 1 0
0 0 0 0
0 1 0 0
.
Damit ist x2 = 0, x1 = t und x3 = −t. Der Eigenraum zum Eigenvektor λ3 = −2
ist
V (λ3) = V (−2) =
t
0
−t
= t
1
0
−1
, t ∈ R
.
Alle Eigenwerte λ1, λ2, λ3 haben die algebraische und die geometrische Vielfach-
heit 1.
3.4. Invarianten.
Satz 4.5. Es sei A eine reelle oder komplexe n× n-Matrix. Dann gilt:
(1) A und die transponierte Matrix AT haben dasselbe charakteristi-
sche Polynom, deshalb besitzen sie dieselben Eigenwerte ( aber
im Allg. andere Eigenr�aume).
(2) Die �ahnlichen Matrizen A und B−1AB haben dasselbe charakte-
ristische Polynom und deshalb auch dieselben Eigenwerte; ~b ist
ein Eigenvektor zu A genau dann wenn B−1~b Eigenvektor von
B−1AB ist.
(3) Die Matrix A ist genau dann invertierbar, wenn alle Eigenwerte
6= 0 sind. Ist λ ein Eigenwert von A mit dem Eigenvektor ~b, dann
ist λ−1 Eigenwert von A−1 mit demselben Eigenvektor ~b.

142 4. LINEARE ALGEBRA
Beweis: zu (1): Es gilt (A− λE)T = AT − λET = AT − λE und
det (A− λE) = det (A− λE)T = det (AT − λE).
Beide Polynome sind also identisch und haben damit dieselben Nullstellen = Eigen-
werte.
zu (2): Es gilt
det (A−λE) = detB−1·det (A−λE)·detB = det (B−1(A−λE)B) = det (B−1AB−λE).
Damit sind beide charakteristische Polynome identisch und haben dieselben Null-
stelle = Eigenwerte. Weiterhin gilt
A~b = λ~b ⇐⇒ ABB−1~b = λBB−1~b = B(λB−1~b) ⇐⇒ (B−1AB)(B−1~b) = λ(B−1~b).
zu (3): detA = λk11 λ
k22 · · ·λkr
r 6= 0 ⇐⇒ λi 6= 0 f�ur alle i = 1, 2, . . . , r. Au�erdem
ist
A~b = λ~b ⇐⇒ ~b = λA−1~b ⇐⇒ A−1~b =1
λ~b. #
Bemerkung 4.5. Die Koe�zienten des charakteristischen Polynoms χA(λ)
sind Invarianten der n × n-Matrix A, bzw. Invarianten der zugeh�origen linearen
Abbildung ~x→ A~x, da sie sich bei einem Basiswechsel nicht �andern.
Satz 4.6. Eigenvektoren ~b1, ~b2, . . . , ~br zu paarweise verschiedenen Eigen-
werten sind linear unabh�angig.
Beweis: Aus
α1~b1 + α2
~b2 + . . .+ αr~br = ~0
folgt nach Anwendung von A :
α1A~b1 + α2A~b2 + . . .+ αrA~br = α1λ1~b1 + α2λ~b2 + . . .+ αrλr
~br = ~0
und nach Subtraktion von
λ1(α1~b1 + α2
~b2 + . . .+ αr~br) = ~0
erh�alt man
(λ1 − λ2)α2~b2 + (λ1 − λr) . . .+ αr
~br = ~0.
Wendet man auf diese Gleichung wiederum A an und subtrahiert das λ2-fache dieser
Gleichung, so folgt:
(λ1 − λ3)(λ2 − λ)α3~b3 + . . .+ (λ1 − λr)(λ2 − λr)αr
~br = ~0.
Sukzessive Fortsetzung ergibt
(λ1 − λr)(λ2 − λr) · · · (λr−1 − λr)αr~br = ~0

3. EIGENWERTE UND EIGENVEKTOREN 143
woraus αr = 0 folgt. Dies ergibt r�uckw�arts eingesetzt αr−1 = . . . = α2 = α1 = 0.
#
3.5. Diagonalisierung. Besonders g�unstig ist der Fall, wenn man eine Basis aus
Eigenvektoren bilden kann:
Satz 4.7. Besitzt eine reelle oder komplexe n × n-Matrix n linear un-
abh�angige Eigenvektoren ~b1, ~b2, . . . , ~bn mit A~bi = λi~bi, und den nicht not-
wendiger Weise verschiedenen Eigenwerten λi, dann bringt die Trans-
formationsmatrix
B = (~b1 ~b2 . . . ~bn)
(mit den Eigenvektoren als Spalten) die Matrix A auf Diagonalform,
d.h., es gilt, wenn die Reihenfolge der λi mit den der ~bi �ubereinstimmt,
B−1AB =
λ1 0 0 . . . 0
0 λ2 0 . . . 0
0 0 λ3 . . . 0...
......
. . ....
0 0 0 . . . λn
=: D.
Beweis: AB = (A~b1 A~b2 . . . A~bn) = (λ1~b1 λ2
~b2 . . . λn~bn) = BD. #
Beispiel 4.14. Es sei
A =
−2 −8 −12
1 4 4
0 0 1
.
Man berechne A100. Es ist von sehr gro�em Nutzen, wenn es gelingt A durch
eine entsprechende Transformation auf Diagonalgestalt zu bringen, denn dann
gilt:
Ak = (BDB−1)k = (BDB−1)(BDB−1)(BDB−1) · · · (BDB−1)
= BDkB−1 = B
λk
1 0 . . . 0
0 λk2 . . . 0
......
. . ....
0 0 . . . λkn
B−1.

144 4. LINEARE ALGEBRA
1. Wir bestimmen die Eigenwerte von A :
det (A− λE) =
∣∣∣∣∣∣∣−2− λ −8 −12
1 4− λ 4
0 0 1− λ
∣∣∣∣∣∣∣= (−2− λ)(4− λ)(1− λ) + 8(1− λ) = (−2λ+ λ2)(1− λ) = λ(λ− 2)(1− λ) = 0
und wir erhalten die Eigenwerte λ1 = 0, λ2 = 1, λ3 = 2.
2. Wir bestimmen die Eigenvektoren: zu l�osen ist des GS (A− λiE)~b = ~0 :
f�ur λ1 = 0 : −2 −8 −12 0
1 4 4 0
0 0 1 0
≈ −2 −8 0 0
1 4 0 0
0 0 1 0
≈ 0 0 0 0
1 4 0 0
0 0 1 0
V (λ1) = V (0) =
4t
−t0
= t
4
−1
0
, t ∈ R
, ~b1 =
4
−1
0
.
f�ur λ2 = 1 : −3 −8 −12 0
1 3 4 0
0 0 0 0
≈ 0 1 0 0
1 3 4 0
0 0 0 0
≈ 0 1 0 0
1 0 4 0
0 0 0 0
V (λ2) = V (1) =
4t
0
−t
= t
4
0
−1
, t ∈ R
, ~b2 =
4
0
−1
.
f�ur λ3 = 2 : −4 −8 −12 0
1 2 4 0
0 0 −1 0
≈ −4 −8 0 0
1 2 0 0
0 0 1 0
≈ 0 0 0 0
1 2 0 0
0 0 1 0
V (λ1) = V (0) =
2t
−t0
= t
2
−1
0
, t ∈ R
, ~b1 =
2
−1
0
.
3. Diagonalisierung:
B =
4 4 2
−1 0 −1
0 −1 0

3. EIGENWERTE UND EIGENVEKTOREN 145
Wir bestimmen B−1 : 4 4 2 1 0 0
−1 0 −1 0 1 0
0 −1 0 0 0 1
≈ 4 4 2 1 0 0
1 0 1 0 −1 0
0 1 0 0 0 −1
≈ 2 4 0 1 2 0
1 0 1 0 −1 0
0 1 0 0 0 −1
≈
2 0 0 1 2 4
1 0 1 0 −1 0
0 1 0 0 0 −1
≈ 1 0 0 1
21 2
0 0 1 −12−2 2
0 1 0 0 0 −1
Damit ist
B−1 =
12
1 2
0 0 −1
−12−2 2
und
A100 = BD100B−1 =
4 4 2
−1 0 −1
0 −1 0
0 0 0
0 1 0
0 0 2100
1
21 2
0 0 −1
−12−2 2
0 4 2101
0 0 −2100
0 −1 0
1
21 2
0 0 −1
−12−2 2
=
−2100 −2102 −4− 2102
299 2101 2101
0 0 1
.
Satz 4.8. (Eigenwertproblem fur symmetrische Matrizen)
F�ur jede reelle symmetrische n× n-Matrix gilt:
(1) Alle Eigenwerte von A sind reell.
(2) Eigenvektoren zu verschiedenen Eigenwerten von A sind ortho-
gonal.
(3) Algebraische und geometrische Vielfachheit jedes Eigenwertes
sind gleich.
Beweis: Wir beweisen nur die erste Eigenschaft. Ist λ ∈ C ein Eigenwert und ~b ∈ Cn
ein Eigenvektor von A, so folgt A~b = λ~b und durch komplexe Konjugation
A~b = λ~b ⇐⇒ A~b = λ~b ⇐⇒ A~b = λ~b,
da A reell ist. Damit erh�alt man
λ~bT~b = (A~b)T~bT = ~bTAT~b = ~bTλ~b = λ~bT~b
und wegen
~bT~b =n∑
i=1
bibi =n∑
i=1
|bi|2 > 0

146 4. LINEARE ALGEBRA
ergibt sich λ = λ und folglich ist λ eine reelle Zahl. #
4. Positiv definite Matrizen
Die Bestimmung der Extremwerte einer reellen Funktion in n Ver�anderlichen ist
eng verbunden mit der Frage, wann eine quadratische Form q(~x) = ~xTA~x f�ur ~x 6= ~0
nur positive oder nur negative Werte annimmt.
Definition 4.8. Eine quadratische Form q(~x) = ~xTA~x bzw. die zugeh�ori-
ge symmetrische Matrix A, hei�t positiv definit (negativ definit), wenn
aus ~x 6= ~0 stets q(~x) = ~xTA~x > 0 (q(~x) = ~xTA~x < 0) folgt.
Die quadratische Form hei�t indefinit, wenn sie sowohl positive als auch
negative Werte annimmt. Sie hei�t positiv (negativ) semide�nit, wenn
stets q(~x) = ~xTA~x ≥ 0 (q(~x) = ~xTA~x ≤ 0) gilt.
Bemerkung 4.6. In der speziellen Relativit�atstheorie spielen die nach H.A.Lorentz
benannten Transformationenx′
y′
z′
t′
= W
x
y
z
t
,
mit einer 4× 4 Matrix W des Raum-Zeit-Kontinuums, so dass die quadratische
Form
q(x, y, z, t) = x2 + y2 + z2 − c2t2
invariant bleibt, eine wichtige Rolle. Diese quadratische Form ist inde�nit; es
gibt"raumartige\ Vektoren ~u ∈ R4 mit q(~u) > 0 und
"zeitartige\ Vektoren ~v ∈ R4
mit q(~v) < 0.
Satz 4.9. Notwendige Bedinung: Wenn die symmetrische Matrix A
positiv de�nit ist, so m�ussen alle Hauptdiagonalelemente positiv sein.
Beweis: Ist die Matrix A positiv de�nit, so muss insbesondere f�ur die Einheitsvek-
toren ~ei gelten ~eTi A~ei = aii > 0. #

4. POSITIV DEFINITE MATRIZEN 147
Beispiel 4.15. Die Matrix
A =
1 2 −2
2 −5 −4
−2 −4 5
ist nicht positiv de�nit.
Satz 4.10. Positivit�at reeller symmetrischer Matrizen:
(1) D = diag (α1, α2, . . . , αn) ist genau dann positiv de�nit, wenn
alle αi positiv sind.
(2) Die reelle symmetrische Matrix A (also A = AT ) ist genau dann
positiv de�nit, wenn W TAW f�ur irgend eine invertierbare n× nMatrix W positiv de�nit ist.
(3) Die relle symmetrische Matrix A ist genau dann positiv de�nit,
wenn s�amtliche Eigenwerte von A positiv sind.
Beweis: zu 1) q(~x) = ~xTD~x =∑n
i=1 αix2i > 0 f�ur alle ~x 6= ~0 ⇐⇒ alle αi > 0.
zu 2) A positiv de�nit, dann gilt ~xT (W TAW )~x = (~xW )TA(W~x) > 0 f�ur alle ~x 6= ~0,
ist dagegen W TAW positiv de�nit, so folgt (W−1)T (W TAW )W−1 = A ist positiv
de�nit.
3) folgt aus 1) und 2) mit einem Hauptachsensystem W. #
Beispiel 4.16. Die Matrix
A =
1 2 −2
2 5 −4
−2 −4 5
ist positiv de�nit mit den Eigenwerten λ1 = 1, λ2 = 5 +
√24 und λ3 = 5−
√24.