1 Chapter 8 NUMERICAL SOLUTION OF ORDINARY DIFFERENTIAL EQUATIONS.
23
1 Chapter 8 NUMERICAL SOLUTION OF ORDINARY DIFFERENTIAL EQUATIONS
-
Upload
kristina-fowler -
Category
Documents
-
view
297 -
download
8
Transcript of 1 Chapter 8 NUMERICAL SOLUTION OF ORDINARY DIFFERENTIAL EQUATIONS.
1
Chapter 8
NUMERICAL SOLUTION
OF
ORDINARY DIFFERENTIAL EQUATIONS
2
PRELIMINARIES
= f (x, y) with an initial condition y = y0 at x = x0. dx
dyConsider
The function f (x, y) may be linear, nonlinear or table of values
When the value of y is given at x = x0 and the solution is required for x0 < x < xf then the problem is called an initial value problem. If y is given at x = xf and the solution is required for xf > x > x0 then the problem is called a boundary value problem.
3
INITIAL VALUE PROBLEMS
A Solution is a curve g (x, y) in the xy plane whose slope at each point (x, y) in the specified region is
given by = f (x, y).
The initial point (x0, y0) of the solution curve g(x, y) and the slope of the curve at this point is given. We then extrapolate the values of y for the required set of values in the range (x0, xf).
dx
dy
4
y2
y1
y0
x0 x1 xn
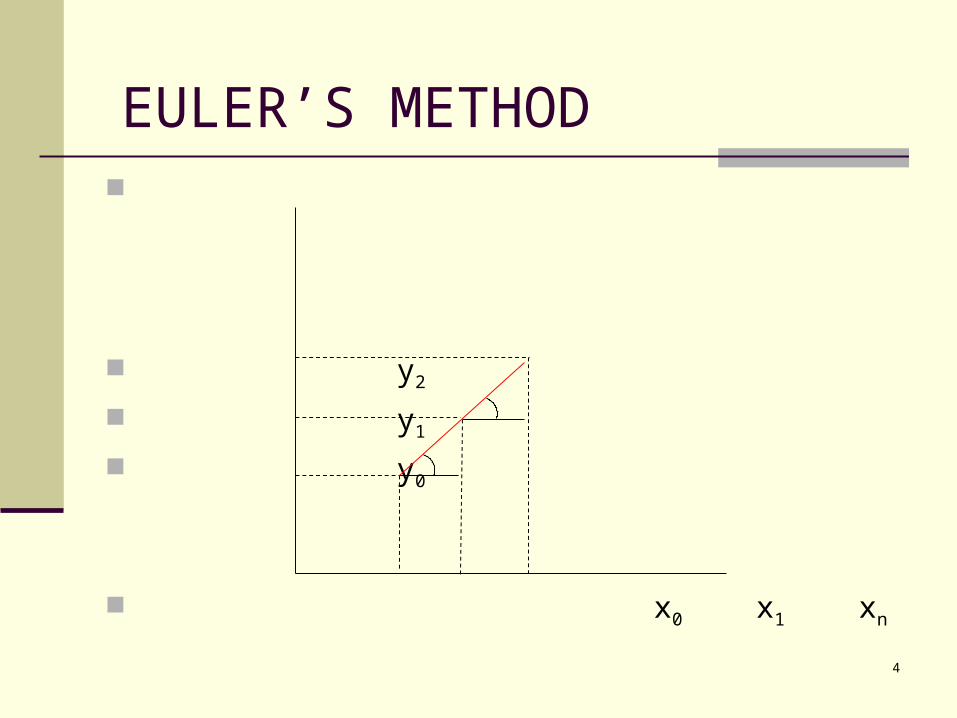
EULER’S METHOD
5
EULER’S METHOD
This method uses the simplest extrapolation technique.
The slope at (x0, y0) is f (x0, y0).
Taking a small step in the direction given by the above slope, we get
y1 = y (x0 + h) = y0 + hf (x0, y0)
Similarly y2 can be obtained from y1 by taking an equal step h in the direction given by the slope
f(x1, y1).
In generalyi+1= yi + h f(xi, yi)

6
Modifications
Modified Euler Method● In this method the average of the slopes at (x0, y0) and (x1, y=1
(1)) is taken instead of the slope at (x0, y0) where y1
(1) = y1 + h f (x0, y0).● In general,
Improved Modified Euler Method● In this method points are averaged instead of
slopes.
yi+1 = yi + ½ h [f (xi, yi) + f (xi + h, yi + hf (xi, yi)) ]
yi+1 = yi + hf (xi + h
2, yi +
2
h f (xi, yi) )
7
Example
Find y (0.25) and y (0.5) given that = 3x2 + y, y(0) = 4 by (i) Euler Method (ii) Modified Euler Method (iii) Improved Euler Method and compare the
results.
8
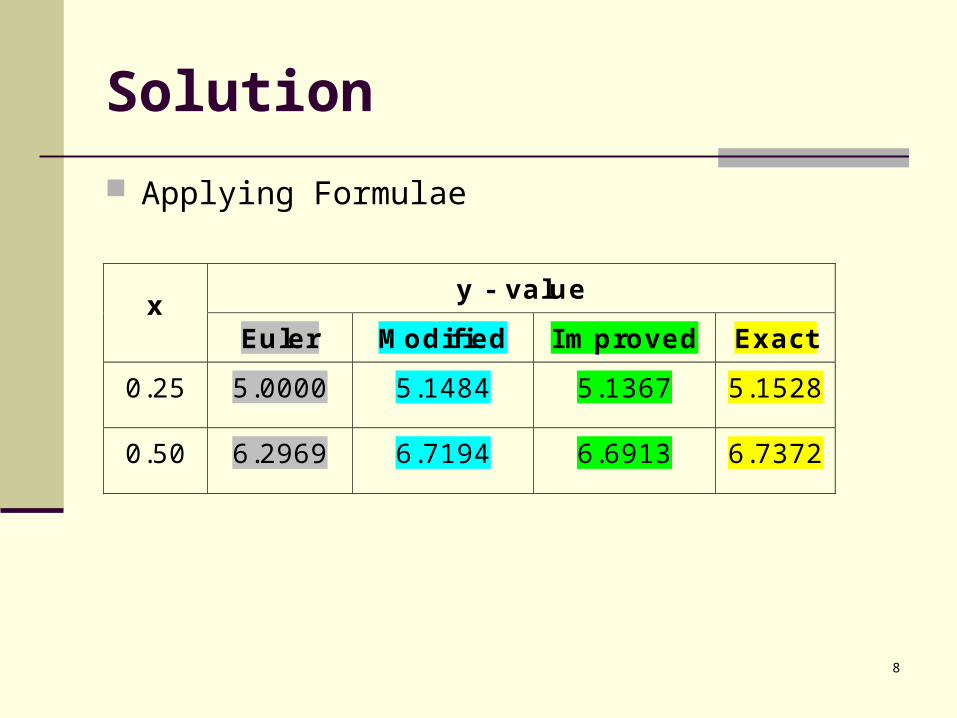
Solution
y - value x
Euler Modified Improved Exact
0.25 5.0000 5.1484 5.1367 5.1528
0.50 6.2969 6.7194 6.6913 6.7372
Applying Formulae
9
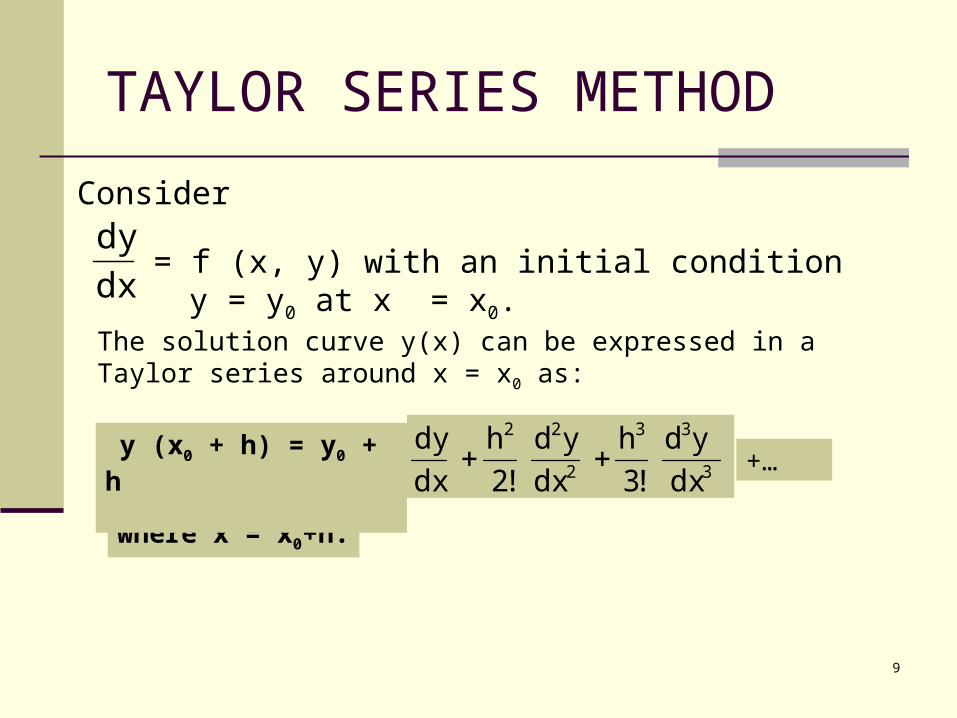
TAYLOR SERIES METHOD
= f (x, y) with an initial condition y = y0 at x = x0. dx
dyConsider
The solution curve y(x) can be expressed in a Taylor series around x = x0 as:
dx
yd
!3
h
dx
yd
!2
h
dx
dy3
33
2
22
+…
where x = x0+h.
y (x0 + h) = y0 + h
10
Example
Using Taylor series find y(0.1), y(0.2) and y(0.3) given that
= x2 - y; y(0) =1dx
dy
Solution Applying formula
y(0.1) = 0.9052y(0.2) = 0.8213 y(0.3) = 0.7492

11
PICARD’S METHOD OF SUCCESSIVE APPROXIMATIONS
This is an iterative method.
= f (x, y) with an initial condition y = y0 at x = x0. dx
dyConsider
Integrating in (x0, x0 + h) y(x0 +h) = y(x0) +
hx
x
0
0
dx)y,x(f
This integral equation is solved by successive approximations.
12
After n steps
This process is repeated and in the nth approximation, we get
y(n) = y0 +
hx
x
1)(n0
0
)dxyf(x,
Example
Find y(1.1) given that = x – y,
y(1) = 1, by Picard’s Method.
dx
dy

13
Solution
y(1)1.1 = 1 +
1.1
1
)1( dxx
= 1.005
Successive iterations yield 1.0045, 1.0046 , 1.0046
Exact value is y (1.1) = 1.0048
Thus y (1.1) = 1.0046

14
RUNGE–KUTTA METHODS
Euler Method is not very powerful in practical problems, as it requires very small step size h for reasonable accuracy.
In Taylor’s method, determination of higher order derivatives are
involved.
The Runge–Kutta methods give greater accuracy without the need to calculate higher derivatives.
15
nth order R.K. Method
This method employs the recurrence formula of the form
yi+1 = yi + a1 k1 + a2 k2 + + an kn
where k1 = h f ( xi, yi)
k2 = h f (xi + p1h, yi + q11 k1)
k3 = h f (xi + p2h, yi + q21 k1 + q22 k2)
kn = h f( xi + pn-1 h, yi + q n-1,1 k1 + qn-2, 2 k2 + q(n-1), (n-1)kn)
……. …….. ………
16
4th order R.K. Method
Most commonly used method
yn+1 = yn + (k1 + 2k2 + 2k3 + k4)
wherek1 = hf(xn, yn)
k2 = hf (xn + , yn + )
k3 = hf (xn + , yn + )
k4 = h f (xn +h, y3 +k3)
2
h
2
h
2
k1
2
k 2
17
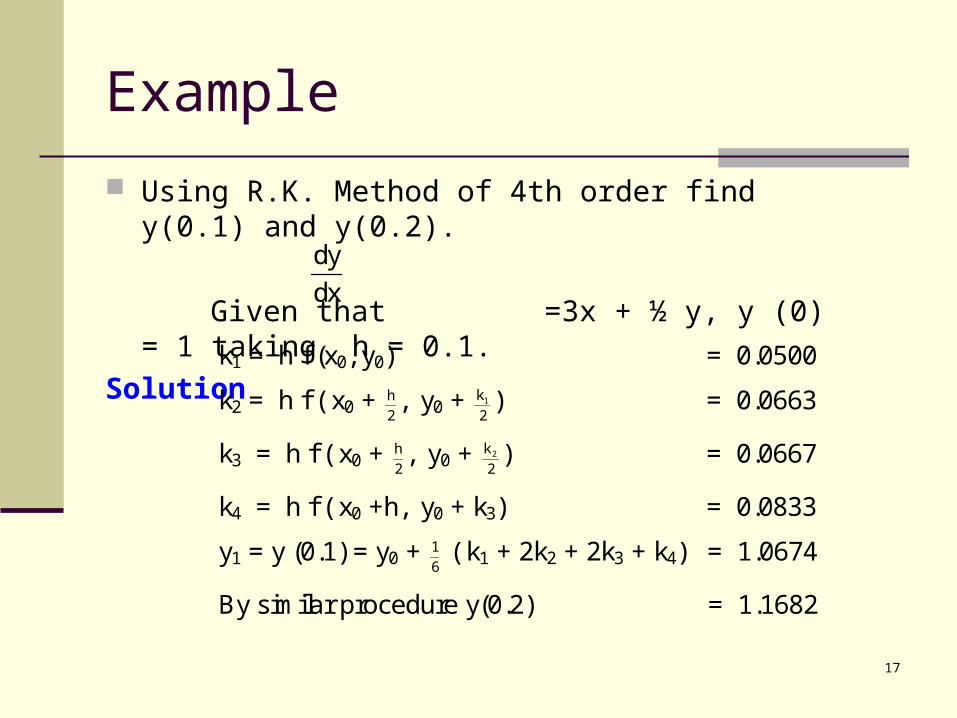
Example
Using R.K. Method of 4th order find y(0.1) and y(0.2).
Given that =3x + ½ y, y (0) = 1 taking h = 0.1.
Solution
dy
dx
k1 = h f (x0, y0) = 0.0500
k2 = h f ( x0 + 2
h , y0 + 2
k1 ) = 0.0663
k3 = h f ( x0 + 2
h , y0 + 2
k 2 ) = 0.0667
k4 = h f ( x0 +h, y0 + k3) = 0.0833
y1 = y (0.1) = y0 + 6
1 ( k1 + 2k2 + 2k3 + k4) = 1.0674
By similar procedure y(0.2) = 1.1682

18
PREDICTOR CORRECTOR METHODS
In the Runge-Kutta methods the solution, point yn+1 is evaluated using only the solution point yn and none of the previous points yn-1, yn-2 etc. on the solution curve. The behaviour of the solution in the past are ignored and each step starts afresh. This will be inefficient. The Predictor-Corrector methods take the previous solution points also into account. In these methods
● First a predictor formula is obtained and a corrector is obtained.

19
Milne’s Predictor-Corrector Method This method uses the past 4 points in the solution.
Predictor formula:
yi+1=yi-3+43
h (2fi–fi-1+2fi-2)+O(h5)
Corrector formula:
yi+1=yi-1+3
h (fi+1 + 4fi + fi-1)+O(h5).
Note: If there is a significant difference between predictor and corrector value the corrector value may be taken as predictor value and a new corrector value may be calculated.
20
Example
Solve using Milne’s Method given that =
y(0) = 2, y (0.2) = 2.0933, y (0.4) = 2.1755,
y (0.6) = 2.2493.
Find y (0.8).
dy
dx y x
1
21
Solution for y(0.8)
yields y4,p = 2.3163
yields y4,C = 2.3164
Predictor formula:
Y4=y0+43h (2f3–f2+2fi1)
Corrector formula:
Y4=y2+3h (f4 + 4f3 + f2).
22
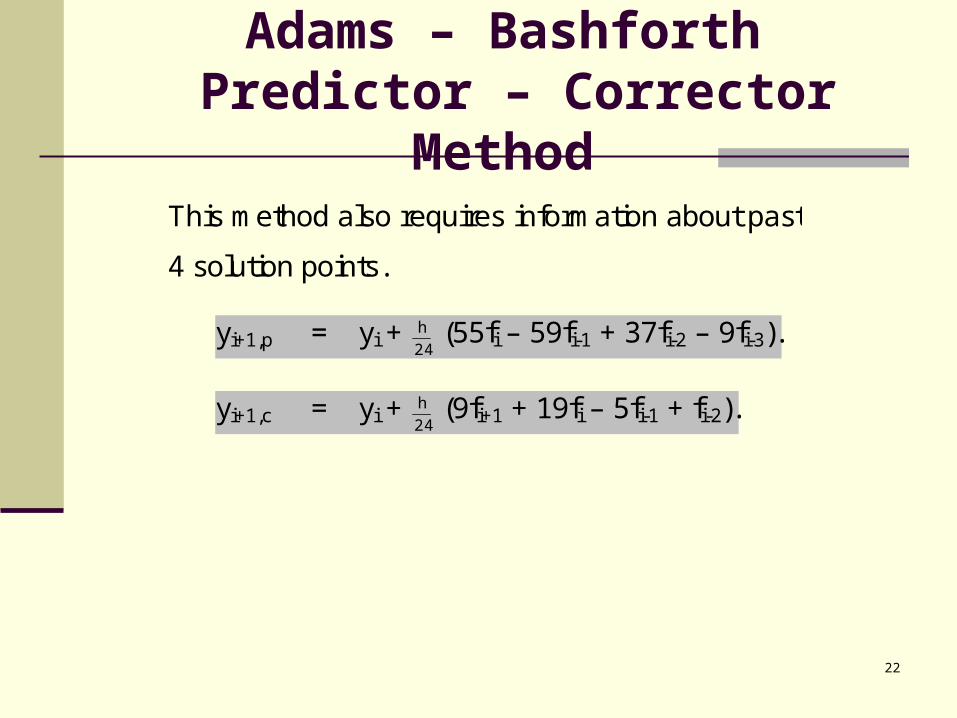
Adams – Bashforth Predictor – Corrector Method
This method also requires information about past
4 solution points.
yi+1,p = yi + 24
h (55fi – 59fi-1 + 37fi-2 – 9fi-3).
yi+1,c = yi + 24
h (9fi+1 + 19fi – 5fi-1 + fi-2).

23
Example
Given y = x2–y, y(0) = 1, y(0.1) = 0.90516, y(0.2) = 0.82127 and y (0.3) = 0.74918, find y (0.4) by Adams method.
Solution
y4,p = y3 + (55f3 – 59f2 + 37f1 – 9f0) = 0.6897
y4,c = y3 + (9f4 + 19f3 – 5f2 + f1) = 0.6897