
1 Absolute Stability with a Generalized Sector Condition Tingshu Hu.
29
1 Absolute Stability with Absolute Stability with a a Generalized Sector Generalized Sector Condition Condition Tingshu Hu Tingshu Hu
-
date post
21-Dec-2015 -
Category
Documents
-
view
221 -
download
3
Transcript of 1 Absolute Stability with a Generalized Sector Condition Tingshu Hu.

1
Absolute Stability with a Absolute Stability with a Generalized Sector ConditionGeneralized Sector Condition
Tingshu HuTingshu Hu

2
Outline
Background, problems and tools Absolute stability with a conic sector, circle criterion, LMIs The generalized sector bounded by PL functions (PL sector) Composite quadratic Lyapunov functions
Main results: Estimation of DOA with invariant level sets Quadratics : Invariant ellipsoid LMIs Composite quadratics : Invariant convex hull of ellipsoids BMIs An example
Building up the main results ─ Foundation: Stability analysis of systems with saturation Main idea: Describing PL sector with saturation functions Absolute stability stability for a family of saturated systems
Summary

3
System with a conic sector condition
0)),()(),(( 21 uktuuktu
The conic sector condition:
A system with a nonlinear and/or uncertain component:
),( tu BAsIF 1)( vu
v
uk1
u
uk2
Question: what is the condition of robust stability for all possible u,t) satisfying the sector condition?

4
Stability for a nonlinear system
Consider a nonlinear system:
),( txfx
Stability is about the convergence of the state to the origin or an equilibrium point. Also, if it is initially close to the origin, it will stay close.
Stability region: the set of initial x0 such that the statetrajectory converges to the origin.
Global stability: the stability region is the whole state space.
0 allfor 0)( xtx

5
Quadratic function and level sets
Given a nn real symmetric matrix P, P=PT. If xTPx>0 for all xRn\{0}, we call P a positive definite matrix, and denote P > 0. (Negative definite can be defined similarly)
With P > 0, define V(x)= xTPx. Then V is a positive definite function, i.e., V(x) > 0 for all xRn\{0}.
Level sets of a quadratic function: Ellipsoids. Given
PxxRxP Tn :),(
1 23 4
),(),(),(),( 4321 PPPP

6
Quadratic stability
),( txfx The system:
Stability condition: If for all x (P,)\{0}, 0),(, txPfxxPx T
Then (P, ) is a contractively invariant set and a region quadratic stability.
(*)
Condition (*) means that along the boundary of (P,) for any 0 , the vector points inward of the boundary
),( txfx
In Lyapunov stability theory, the quadratic Lyapunov function is replaced with a more general positive-definite function
Px
x

7
Quadratic stability for linear systems
For a linear system:
Stability condition: If for all x (P,)\{0},
0PAxxT
Then (P, ) is a contractively invariant set and a region of quadratic stability.
(*)
Axx
(*) is equivalent to definite)-(negative0 PAPAT
Lyapunov matrix inequality.
As long as there exists a P satisfying the matrix inequality, the linear system is stable
0)( xPAPAx TT
8
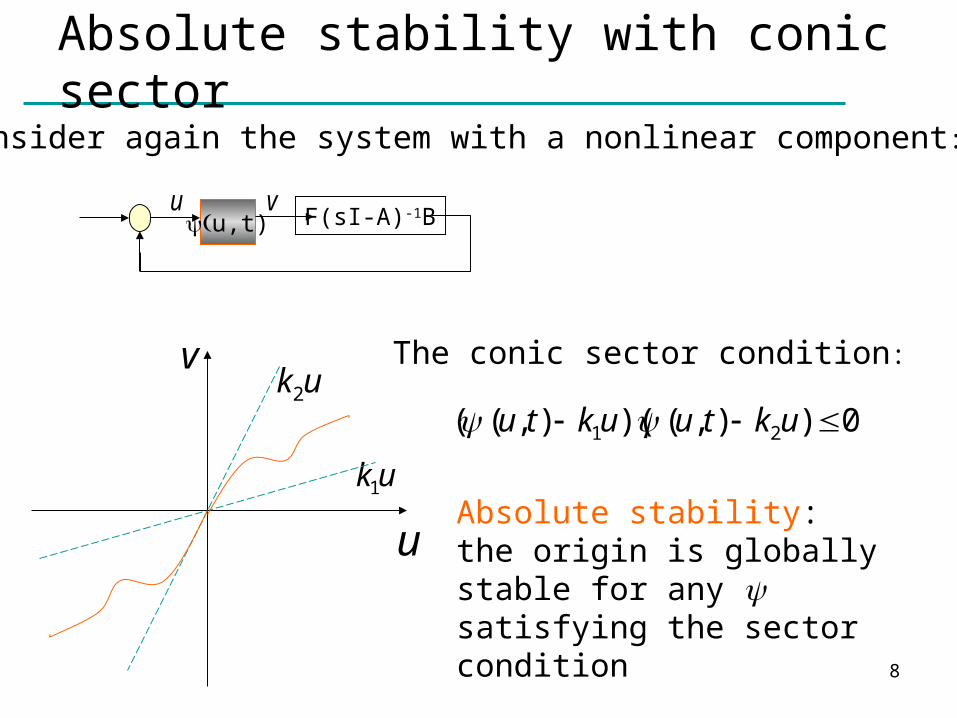
Absolute stability with conic sector
0)),()(),(( 21 uktuuktu
The conic sector condition:
Consider again the system with a nonlinear component:
v
uk1
u
uk2
Absolute stability: the origin is globally stable for any satisfying the sector condition
u,t)vu
F(sI-A)-1B

9
Conditions for absolute stability
0)()'(
0)()'(
22
11
BFkAPPBFkA
BFkAPPBFkA
Popov criterion Circle criterion LMI condition Quadratic stability
Description with linear differential inclusion (LDI):
],[:)( 21 kkkxkBFAx
Quadratic stability: exists P=P’ >0 such that
),( tu BAsIF 1)( vu
v
uk1
u
uk2
xBFkAxBFkA )(,)(co 21 Px
x

10
Motivation for a generalized sector
uk1
u
uk2Limitations of the conic sector: • not flexible• could be too conservative
Note: Subclass of the conic sector has been considered, e.g., slope restricted,Monotone ( Dewey & Jury, Haddad & Kapila, Pearson & Gibson, Willems, Safonov et al,Zames & Falb, etc.)
Our new approach extend the linear boundary functions to nonlinear functions basic consideration: numerical tractability Our Choice: Piecewise linear convex/concave boundary functions

11
A piecewise linear (PL) sector
Let and be
odd symmetric, piecewise linear convex or concave for u > 0
The generalized sector condition:
u
v),( tu
)(1 u
v
u
)(2 u
)(1 u
)(2 uMain feature: More flexible and still tractable
0))(),())((),(( 21 utuutu

12
A tool: the composite quadratic function
0,,, 21 JQQQ
0,1: 1 jJJR
xQQxxV JJc1
11
min2
1:)(
Given J positive definite matrices:
Denote
The composite quadratic function is defined as:
The level set of VC is the convex hull of ellipsoids Convex, differentiable

13
Applying composite quadratics to conic sectors
Recall: A systems with conic sector condition can be describedwith a LDI: xAxAx 21 ,co
Theorem: Consider Vc composed from Qj’s. If there exist ijk ≥ 0,
i = 1,2 , j,k =1,2,…,J , such that
)(1
'jk
J
kijkijji QQAQQA
Then .00)( xxVc )0)(( xxV T
Example: A linear difference inclusion: x(k+1)co{A1x, A2(a)x}
1,4.04.0/4.04.0)(,4.04.0
4.04.021
aa
aaAA
With quadratics, the maximal a ensuring stability is a1=4.676;With composite quadratics (N=2), the maximal a is a2=7.546
14
Main results: Invariant level sets
Quadratics : Invariant ellipsoid LMIs Composite quadratics : Invariant convex hull of ellipsoids BMIs An example

15
Absolute stability analysis via absolutely invariant level sets
1)(:)1( xVRxL nV
Consider the system: ),( tFxBAxx
LV (1) is absolutely contractively invariant (ACI) if it is contractively invariant for all co {
For a Lyapunov candidate V ( x ), its 1-Level set is
The set LV (1) is contractively invariant (CI) if
RtLxtFxBAxxVV VT },0{\)1(0)),(()(
Quadratics : ACI ellipsoids, Composite quadratics: ACI convex hull of ellipsoids

16
Result 1: contractive invariance of ellipsoid
NiY ni ,...2,1,R1
),( if,
],( if,
],0[ if,
)( 2111
10
NNN buucuk
bbuucuk
buuk
u
,)(FxBAxx
Consider the system,
Theorem: An ellipsoid ( Q ) is contractively invariant iff
0)()'( 00 QBFkABFkAQ
and there exist such that
NiQQFkY
FQkYc
BYBYAQQA
ii
iii
ii
,,2,1,0''
,0'''2

17
Result 2: Quadratics → ACI ellipsoids
NiYY nii ,...2,1,R, 121
2,1,
),( if,
],( if,
],0[ if,
)(
,,,
2111
10
q
bucuk
bbucuk
buuk
u
qNqNqN
qqqq
q
R,
,)(),(co),(
,),(
21
tu
uutu
tFxBAxx
The system,
Theorem: An ellipsoid ( Q ) is ACI if and only if
2,1,0)()'( 00 qQBFkABFkAQ qq
and there exist such that
2,1,,,2,1,0''
,0'''
2
qNiQQFkY
FQkYc
BYBYAQQA
iqiq
iqiqiq
iqiq

18
Result 3: ACI of convex hull of ellipsoids
],,1[],,1[,R, 121 JjNiYY n
jiji
2,1,)()()'(1
000
qQQQBFkABFkAQJ
kjkqjkjqqj
and there exist such that
],1[,2,1],,1[,0''
,)('''
2
1
JjqNiQFQkY
FQkYc
QQBYBYAQAQ
jjiqiqj
jiqiqjiq
J
kjkiqjkiqjiqjjj
Consider Vc composed from Qj’s. LVc (1) is the convex hull of (Qj
-1).
Theorem: LVc (1) is ACI if there exist iqjk ≥ 0, i 0,1,…,N , q=1,2, j,k =1,2,…,J , such that

19
Optimizing ACI level sets
],1[,2,1,)()()'(
],1[],,1[,0
'1
,sup
1000
1
JjqQQQBFkABFkAQ
JjKpQγx
x
J
kjkqjkjqqj
J
jjpjp
p
],1[,2,1],,1[,0''
,)('''
2
1
JjqNiQFQkY
FQkYc
QQBYBYAQAQ
jjiqiqj
jiqiqjiq
J
kjkiqjkiqjiqjjj
Choose reference points x1,x2,…,xK . Determine ACI LVc (1) such
that xp’s are inside LVc (1) with maximized. 1x
2x
20
8.84.0
,7.0
6.0,
3.01
01.03.0
,,co),(
F
BA
FxBAxx
-5 0 5-1.5
-1
-0.5
0
0.5
1
1.5
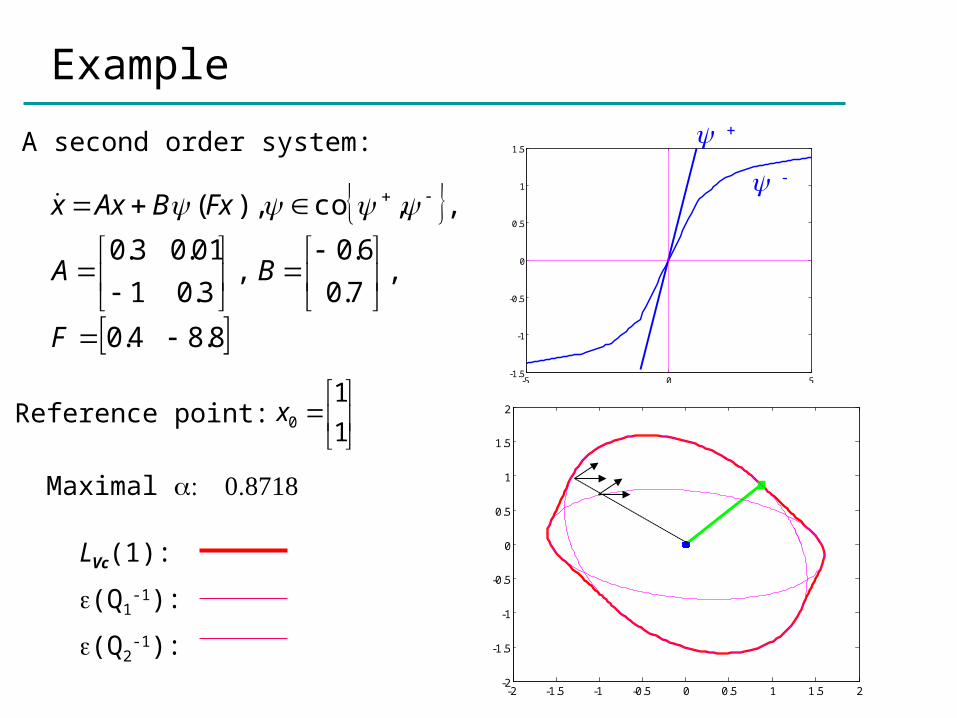
Example
A second order system:
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-2
-1.5
-1
-0.5
0
0.5
1
1.5
2Reference point:
1
10x
Maximal
LVc(1):
(Q1-1):
(Q2-1):

21-2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5
-3
-2
-1
0
1
2
3
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Composite quadratics + PL sector max0.8718
Quadratics + PL sector max = 0.6401
Quadratics + conic sectormax 0.4724
A closed-trajectory under the “worst switching” w.r.t Vc
ACI convex hull
A diverging trajectory

22
Building up the main results Stability analysis for systems with saturation Describing PL sector with saturation functions Stability for an array of saturated systems
Absolute stability

23
Stability analysis for systems with saturation
1||),(0))(sat)()(sat( 11 fxkPxfxfxfxkfx
uk1
}1|,min{|)sgn()(sat,)(sat uuuxfbAxx The system
1':)( PxxRxP n
Problem: To characterize the (contractive) invariance of
Traditional approach: find k, 0 < k≤ 1, such that
u
then use the traditional absolute stability analysis tools
Note: The condition takes form of bilinear matrix inequalities
maxu

24
New approach of dealing with saturation
vR1))(sat)()(sat( uuuvu
The basic idea: If |v| ≤ 1, then
u
-1
For any row vector h,
1||0))(sat)()(sat( hxfxfxhxfx
1||0))(sat)()(sat( 11 fxkfxfxfxkfx
Recall the traditional approach
Further more, the resulting condition for invariance of ellipsoid includes only LMIs is necessary and sufficient
We have full degree of freedom in choosing h as compared with
the one degree of freedom in choosing kin kf.

25
Foundation: The necessary and sufficient condition for invariance of ellipsoid
,)(sat xfbAxx
Theorem: the ellipsoid ( Q) is contractively invariant for
if and only if there exists such that ,R1 ny
,0'
1
,0'''
0)()'(
Qy
y
bybyAQQA
QbfAbfAQ

26
Building-up tool: description of PL functions with saturation functions
1b
u
c
kkcuku
1
1011 sat)(
1k
),( if,
],0[ if,)(
111
10
buucuk
buuku
Consider a PL function withonly one bend
0k
u
)(u
The necessary and sufficient condition for invariance of ellipsoid follows.
fxc
kkbcxfbkAx
xfbAxx
1
1011 sat)(
,)(

27
Key step: description of PL functions with saturation functions
)(,co)()
0,,2,1:)(min)()
0 uukub
uNjuua
i
i
),( if,
],( if,
],0[ if,
)( 2111
10
NNN buucuk
bbuucuk
buuk
u
A PL function,
u
c
kkcuku
i
iiii
0sat)(Define
)(1 u )(2 u
u
)(u
)(3 u
uk0
Properties:
28
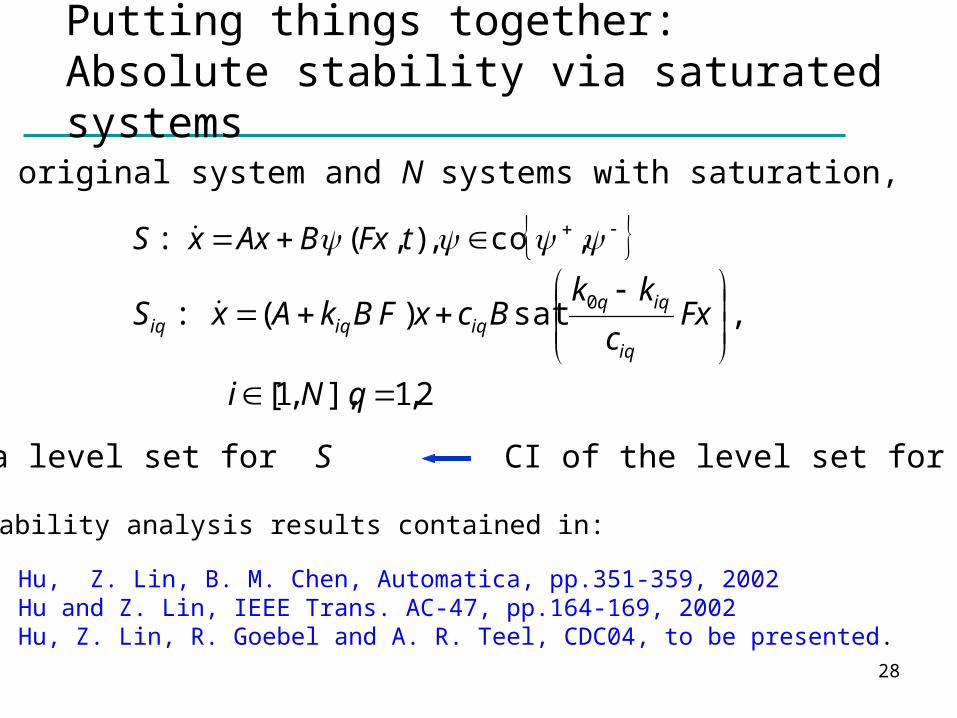
Putting things together:Absolute stability via saturated systems
2,1],,1[
,sat)(: 0
qNi
Fxc
kkBcxFBkAxS
iq
iqqiqiqiq
,co,),(: tFxBAxxS
The original system and N systems with saturation,
ACI of a level set for S CI of the level set for all Siq
Stability analysis results contained in:
T. Hu, Z. Lin, B. M. Chen, Automatica, pp.351-359, 2002T. Hu and Z. Lin, IEEE Trans. AC-47, pp.164-169, 2002T. Hu, Z. Lin, R. Goebel and A. R. Teel, CDC04, to be presented.

29
Summary • The systems: subject to PL sector condition • Tool: composite quadratic Lyapunov function• Problem: determine ACI sets (convex hull of ellipsoids)
• Key step: description of PL functions with saturations
• Main feature: more flexible as compared with
conic sector, and still tractable• Future topics: under PL sector condition,
characterize the nonlinear L2 gain
apply non-quadratics to study input-state,
input-output, state-output properties

















