08/09/2008 E.Lazzaro EDF/CEA/INRIA Summer School 1 Free and Controlled Dynamics of Magnetic Islands...
49
08/09/2008 E.Lazzaro EDF/CEA/INRIA Summer School 1 Free and Controlled Dynamics of Magnetic Islands in Tokamaks E. Lazzaro IFP “P.Caldirola”, Euratom-ENEA-CNR Association, Milano, Italy
-
Upload
linette-wiggins -
Category
Documents
-
view
214 -
download
0
Transcript of 08/09/2008 E.Lazzaro EDF/CEA/INRIA Summer School 1 Free and Controlled Dynamics of Magnetic Islands...

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
1
Free and Controlled Dynamics of Magnetic Islands in Tokamaks
E. Lazzaro
IFP “P.Caldirola”, Euratom-ENEA-CNR Association, Milano, Italy

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
2
Outline• Brief reminder of tokamak ideal equilibrium• Nonideal effects:formation of magnetic island in
tokamaks through magnetic reconnection• Classical and neoclassical tearing modes• Useful mathematical models of mode dynamics• Problems and strategies of control by EC Current
Drive • Recent results from of experiments (FTU,ASDEX,DIII-D tokamaks)

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
3
Motivation and Objectives
• The reliability of Plasma Confinement in tokamaks is limited by the occurrence of
MHD instabilities that appear as growing and rotating MAGNETIC ISLANDS LOCALIZED on special isobaric surfaces and contribute to serious energy losses and can lead to DISRUPTION of the tokamak discharged.
• They are observed both as MIRNOV magnetic oscillations and as perturbations of Electron Cyclotron Emission and Soft X-ray signals
• They are associated with LOCALIZED perturbation of the current J ,e.g. J bootstrap
• Is it possible to stabilize or quench these instabilities by LOCALIZED injection of wave power (E.C.), heating locally or driving a non-inductive LOCAL current to balance the Jboot loss?

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
4
Tokamak magnetic confinement configurationThe most promising plasma (ideal) confinement
is obtained by magnetic field configurations that permit a magnetoidrostatic balance of fluid pressure gradient and magnetic force
Since the isobaric surfaces (p=nT) are “covered ergodically” by the lines of force of B and since the nested surfaces are of toroidal genus
The B field can be expressed through the the magnetic flux (R) through a poloidal section and (F(R,Z))through a toroidal section
00
B
JrotB
gradBJ
div
p
0 pB
Superficie poloidale
Superficie toroidale
0 B
)(FpT BBB

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
5
Non ideal effectsHelical Perturbations

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
6
• Tokamaks have good confinement because the magnetic field lies on isobaric isobaric surfacessurfaces of of toroidal genustoroidal genus
•The The BB field lines “pitch” is constant on each nested surface field lines “pitch” is constant on each nested surface
•(Isobaric) magnetic surfaces where (Isobaric) magnetic surfaces where q()=m/n have a different topologyhave a different topology: there are : there are alternate alternate OO and and XX singular pointssingular points that that do not exist on irrational surfaces: axisymmetry is : axisymmetry is broken and divbroken and divBB=0 allows a B=0 allows a Brr component component
•If current flows preferentially along certain field lines, magnetic islands form
•The contour of the island region is an isobar (and isotemperature)
• As a result, the plasma pressure tends to flatten across the island region, (thermal short-circuit) and energy confinement is degraded
Overview of basic concepts
)( 0
qd
d
B
B

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
7
Tokamak equilibrium and helical perturbations• Tokamak Equilibrium Magnetic field in terms of axisymmetric flux function
• 1° Force equilibrium
• Field line pitch :
• Helically perturbed field
• 2° Equilibrium condition (local torque balance)
• To order(r/R)
)(000 rB eeB
JB 0 BJ J B
J0 B1 J1 B0 B0 J1 B1 J0 J0 B1 J1 B0 0
nmtr
rr
,cos),(~,),(
1
10
eB
BBB
J0 B0 cp
)( 0
qd
d
B
B
B0 J1 B1r
J 0
r
O(2) Vanishing in axisymmetry

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
8
Basic Formalism of evolution equations
• Reduced Resistive MHD Equations: from vector to scalar system
• Compressional Alfven waves are removed• Closure of system with fluid equations
• Ordering Filters physics
E 1
c
A
t
B A
2A 4c
J
J 0
1, A
E 1
c
t
B F
2 4c
J
BJ //
B
J 0
1
,,,:)(
,,,,,:)(
,,:)1(
12
//
AR
RAcompr
m
S
JVBO
tJVBRrO
BO

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
9
Ideal and Resistive MHD• In Ideal MHD Plasma Magnetic topology is conserved
• B is convected with V
• In Resistive MHD Magnetic field diffuses relative to plasma topology
• The evolution of linear magnetic perturbations is
• Topology can change through reconnection of field lines in a “resistive” layer where
• Resistive MHD removes Ideal MHD constraint of preserved magnetic topology allowing possible instabilities with small growth rates
• • Key parameter
B
t V B
B
t V B c2
42B
˜ B
tB0 b ˜ V
ik // (x ) 0
c2
42 ˜ B
k //(x) 0
E V B /c J
S R A cr2VA 4R ~ 105 108
˜ B
08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
10
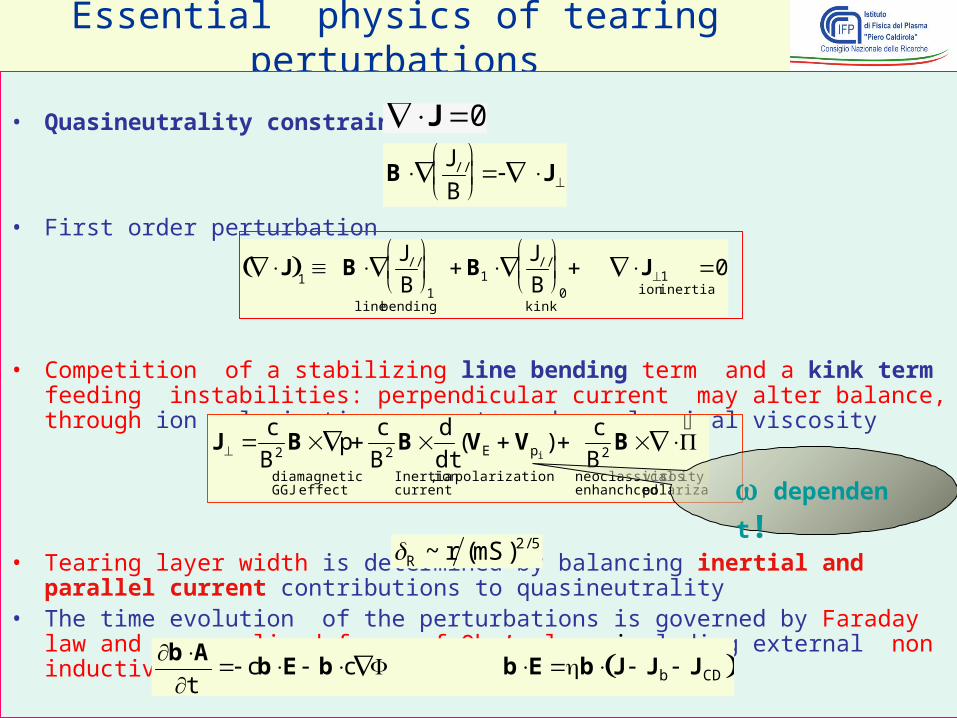
Essential physics of tearing perturbations
• Quasineutrality constraint
• First order perturbation
• Competition of a stabilizing line bending term and a kink term feeding instabilities: perpendicular current may alter balance, through ion polarization current and neoclassical viscosity
• Tearing layer width is determined by balancing inertial and parallel current contributions to quasineutrality
• The time evolution of the perturbations is governed by Faraday law and generalised forms of Ohm’s law, including external non inductive contributions
BJ //
B
J
J 1 BJ //
B
1line bending
B1 J //
B
0kink
J1ion inertia
0
J c
B2 BpdiamagneticGGJ effect
c
B2 Bd
dt(VE Vp i
Inertia,ion polarizationcurrent
)c
B2 B
neoclassical viscos ityenhanchced polarization
R ~ r (mS)2 / 5
dependent
!
bAt
cbE bc bE bJ Jb JCD
J 0
08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
11
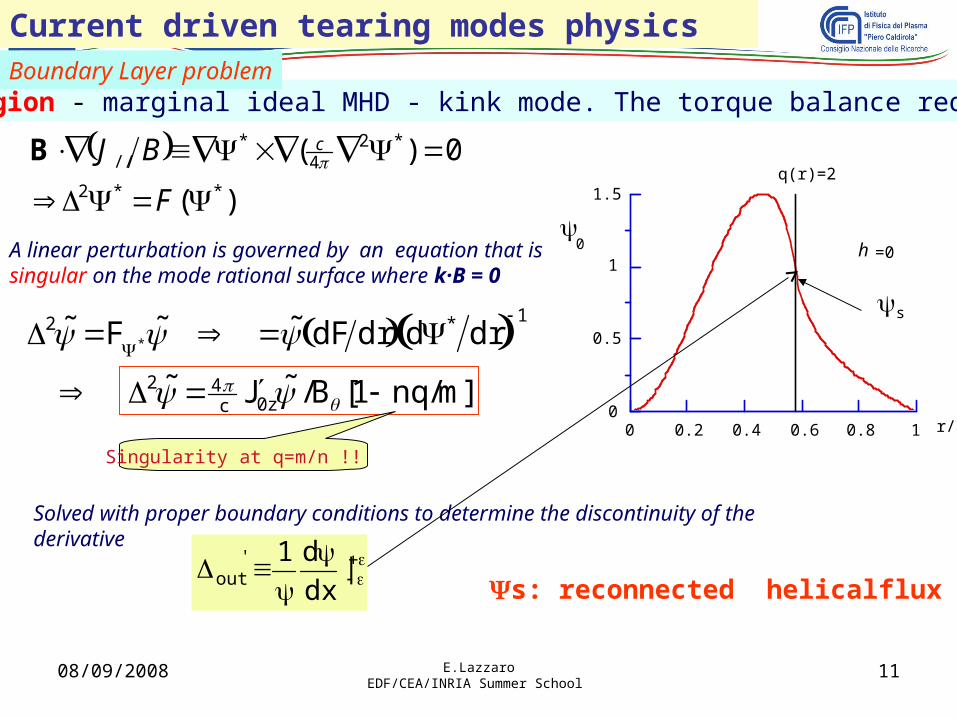
Current driven tearing modes physics
Outer region - marginal ideal MHD - kink mode. The torque balance requires:
)(
0)(**2
*24
*//
F
BJ cB
Solved with proper boundary conditions to determine the discontinuity of the derivative
out' 1
ddx
|
0
0.5
1
1.5
0
h
0.2 0.4 0.6 0.8 1
0
r/a
=0
q(r)=2
2 ˜ F*
˜ ˜ dF dr d* dr 1
2 ˜ 4c
J 0z˜ /B [1 nq /m]
A linear perturbation is governed by an equation that is singular on the mode rational surface where k·B = 0
Singularity at q=m/n !!
Boundary Layer problem
s
s: reconnected helicalflux

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
12
Current driven tearing modes physics
• The discontinuous derivative equivalent to currents, localised in a layer across the q=m/n surface, where ideal MHD breaks down
•Ampere’s law relates the B perturbation to the current perturbation. For long, thin islands, it can be written:
•Integrating this over a period in x and out to a large distance, l, from the rational surface (w<<l<<rs) gives:
•Inner regionInner region - includes effects of inertia, resistivity, drifts, viscosity, etc
1
R
d2dr2
B(B)
B
4c
J||
˜ s in (,S,) 4
cdx
dJ // cosm x r rs
dr
d
2
2
dr
d
l l
Linear Dispersion relation:
Linear Growth rate:
out (A, J 0 //(rs)) in (,R,)
[rs out ]4 / 5 r q
q
2 / 5m2 / 5
R3 / 5A
2 / 5
13
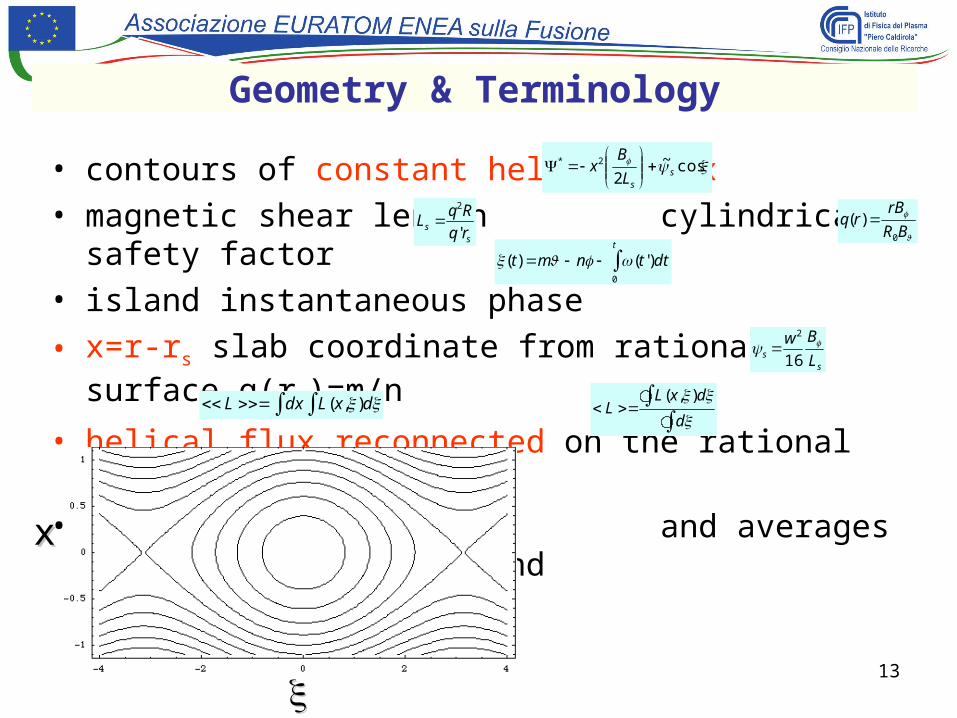
Geometry & Terminology
• contours of constant helical flux• magnetic shear length cylindrical safety factor• island instantaneous phase
• x=r-rs slab coordinate from rational surface q(rs)=m/n
• helical flux reconnected on the rational surface• integrals and averages on island
cos~2
2*s
sL
Bx
ss rq
RqL
'
2
q(r) rB
R0B
(t) m n (t ')dt'0
t
s w2
16
B
Ls
xx
L L(x,)d
d
L dx L(x,)d

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
14
Neoclassical Tearing Modes (NTM)
• In a tearing-stable plasma (0’<0) • Initial island large enough to flatten the local
pressure• => loss of bootstrap current inside the island
sustains perturbation• Instability due to local flattening of bootstrap
current profile• Typically islands with m/n: 2/1 or 3/2 periodicity
Can prevent tokamaks from reaching high

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
15
Summary of RMHD equations
Resistive-neoclassical MHD fluid modelResistive-neoclassical MHD fluid model
nt
nV 0
0
dV
dtJB p
s
s
B A
A J 0
E 1cAt
E 1
cV BJ
1
ene
pe 1
ene
,1
nt
nV b V// i J // e 0
0
dV// iB
dt Bp B
s
s
V 1B2 B
B F
BJ //
B
J 0
24c
J //
J // //
1
cR
t
b1
ene
bpe 1
ene
b
e
J 1
B2 B 0
dVi
dtp
s
s

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
16
Bootstrap Current
J b c
B
dp
dr
Generalised parallel Ohm’s law with electron viscosity effects
Constant on magnetic surfaces
0 1
c
t
1
enbpe
1
enb
// e
electron viscos itybootstrap current
J //
b
// e meneV e
1 c
B
dp
drbootstrap current
(1 )J //trapped particleeffect
V e c
enB
r
pe pi B
B
V e V i
Electron viscous stress damps the poloidal electron flow - new free energy source.
Mechanism of bootstrap current

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
17
The NTM drive mechanism
•An initial perturbation( Wseed) leads to the formation of a magnetic island
• The pressure is flattened within the island at the O point, not at X point
• Thus the bootstrap current is removed inside the island
• This current perturbation amplifies the magneticfield perturbation,i.e. the island
Consider an initial small “seed” island:
Perturbed flux surfaces;lines of constant
Pressure flattens across island
Minor radius
Pre
ssur
e
Poloidalangle

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
18
Construction of the nonlinear island equation
• 1-A nonlinear averaging operator over the helical angle =m-nt makes
• 2-The parallel current is obtained solving the current closure (quasineutrality) equation ,averaging and and inserting it in Ampere’s law
•
• 3-Averaging Faraday law and eliminating <J//> gives
• 4-An integration weighted with cosover the radial extent of the nonlinear reconnection layer (island ), one obtains the basic Rutherford Equation for
• W(t) = 4(Br rs / B nq/)1/2
// J // B B 1J I Jp J // J nc B
J // J // J nc J nc J CD c
4RR 2
R
rs
dW
dtrs (W); ˜ s (W) 4
cdx
dJ // cos
// 0
CDncncs JJJRR
c
tc
2
4cos
~1
Grad-Shafranov equation
“neoclassical” currents
R.F.Current drive

19
Modified Rutherford Equation
4g1
dw
dt
rs2
r
['0 'bs 'GGJ 'pol 'EC Re 'wall ]
g1 d 1
cos 2 d / / 0.82
0' m 1
w
ws
NTM evolution (Integrating Faraday-Ampere on island)NTM evolution (Integrating Faraday-Ampere on island)
geom. factorgeom. factor
BS' aBS p
rs
Rax
Lq
Lp
w
w2 ws2 Lq q /q', Lp p / p', ws / //
(de)stabilising factor, <0 in NTM (# TM)(de)stabilising factor, <0 in NTM (# TM)
GGJ' aGGJ p
rs
Rax
2Lq
rs
Lq
Lp
1 1/q2 1
w
JJbootstrapbootstrap Term >0 Term >0
pol' apol p
rs
Rax
3 / 2Lq
Lp
2
rL2 T
T
1
1
w3 , T m
rs
Te,rs
e B Lne
pressure gradient & curvature pressure gradient & curvature Term <0Term <0
Polarisation Term >0, Polarisation Term >0, <0<0
EC' CD
' H' aCD
ICD
Ip,rs
Lq
cd2 (w)
1
w2 aH rs
Lq
Ip,rs
ˆ P EC
ne,rsTe,rs
J//,rsH w
Electron Cyclotron CD Electron Cyclotron CD TermTerm
w'
2m
rs
rs
d
2m w 2 i w 1 w 2 resistive wall Termresistive wall Term
G.Ramponi, E. Lazzaro, S. Nowak, PoP 1999
amc0
presentazioneanimazione personalizzatastruttura

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
20
Threshold Physics Makes an NTM Linearly Stable and Non-linearly Unstable
Rrs
dw
dt= ’ rs +
1/ 2 Lq
L p prs
w
w2 wd2 c(, i )
w pol2
w3
transport threshold(R.Fitzpatrick ,1995)•related to transverse plasma heat conductivity that partially removes the pressure flattening
~ 1 cm
polarization threshold(A.Smolyakov, E.Lazzaro et al, 1995)•ion polarization currents for ions E X B drifts are stronger than for electrons J is generated. J is not divergence free J// varies such that =0
c(,i) : polarization term also depends on
frequency of rotating mode, stabilizing only if 0>>i (J, Connor,H.R. Wilson et.al,1996)
wd Ls2r2
m2 //
1/ 4wpol (Lq/Lp)
1/2 1/2 I ~ 2
cm
Q ui ckTi me™ and aTI FF (Uncompressed) decompressorare needed to see thi s pi cture.

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
21
The Modified Rutherford Equation: discussion
w
dt
dw
Unstable solution Threshold poorly understood needs improved transport model need improved polarisation current
Stable solution saturated island width well understood?
Need to generate “seed” island additional MHD event poorly understood?
WsatWthres

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
22
Threshold Physics Makes an NTM Linearly Stable and Non-linearly Unstable
Rrs
dw
dt= ’rs +
1/ 2 Lq
L p prs
w
w2 wd2 c( )
w pol2
w3
-4
-2
0
2
4
6
8
10
0 0.05 0.1 0.15 0.2
Rrs dt
dw
w / a
wd=1.5cm
wpol
=2cm
wd=0, w
pol=0
m/n=2/1
’rs=-2
p=0.6
1/2 Lq/Lp=0.56c() =1
rs=1.54 ma=2 m
unstable
stable

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
23
The islands can be reduced in width or completely suppressed by a current driven by Electron Cyclotron waves (ECCD) accurately located within the island.
A requisite for an effective control action is the ability of identifying the relevant state variables in “real time”
-radial location -EC power absorption radius - frequency and phase
and vary accordingly the control variables -wave beam power modulation -wave beam direction.
rabs≈ rO-point- 3 cm
rabs≈ rO-point
rabs≈ rO-point+ 1 cm
rabs≈ rO-point+ 2 cm

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
24
Co-CD can replace the missing bootstrap
current
Localized Co-CD at mode rational surface may both increase the linear stabilityand replace the missing bootstrap current
CD' aCD
ICDI p (rs )
Lq
wcd2
[m,n (w /wcd )wcd
2
w20,0 ]
where:
Hm,n = efficiency by which a helical component is created by island flux surface averaging H0,0 =modification of equilibrium current profile
Rrs
dw
dtrs ['0 'bs ' pol 'CD ]
aCD 832
wCD / rs 2

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
25
CD efficiency to replace the missing bootstrap current
-1.5
-1
-0.5
0
0.5
1
1.5
-200 -150 -100 -50 0 50 100 150 200
RF modulation sketch
x/cd
(deg)
RF
mod
mod
Hm,n depends on:
• w/wcd
• whether the CD is continuous or modulated to turn it on in phase with
the rotating O-point
• on the radial misalignment of CD w.r.t. the rational surface q=m/n 50% on - 50% off
No-misalignment
0
0.1
0.2
0.3
0.4
0.5
0 1 2 3 4w/w
cd
Hm,n
50/50 mod
CW

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
26
Larger CD efficiency with narrow JCD profiles
Note: •within the used model, in case of perfect alignment, the (2,1) mode is fully suppressed with 50% modulated EC power, Icd=
3% Ip(rs) (PEC~ 7 MW by FS
UL), when wcd =2.5 cm
•larger wcd would reduce the
saturated island width (partial stabilization)•narrow, well localized Jcd profiles are a major request for the ITER UL!
--- stable-1
0
1
2
3
4
5
6
7
0 0.05 0.1 0.15 0.2
NO_ECCD
cw_wcd=7.5cm
cw_wcd=5cm
mod_wcd=5cm
cw_wcd=2.5cm
mod_wcd=2.5cm
Rrs dt
dw
w / a
Icd
/Ip(rs) = 0.03

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
27
Elements of the problem of control of NTM by Local absorption of EC waves
•The STATE variables of the process are the mode helicity numbers (m,n), the radial location rm/n, the width W (in cm!) of the island, and its
rotation frequency .
•The CONTROL variables of the system dedicated to island chase & suppression are: the radius rdep, of deposition the wave beam power depending
on the wave BEAM LAUNCHING ANGLES , the power pulse rate (CW or modulated)
•It is necessary to define and design real-time diagnostic and predictive methods for the dynamics of the process and of the controlling action, considering available alternatives and complementary possibilities

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
28
Approach to the problem
• One of the most important objectives of the control task is to prevent an island to grow to its nonlinear saturation level (that is too large)
• It is necessary to detect its size W, and its rotation frequency as early as possible after some trigger event has started the instability.
• Therefore the analysis of dynamics in the linear range near the threshold is important to be able to construct a useful real-time predictor algorithm.
• Key questions then are: observability and controllability• The work is in progress…
08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
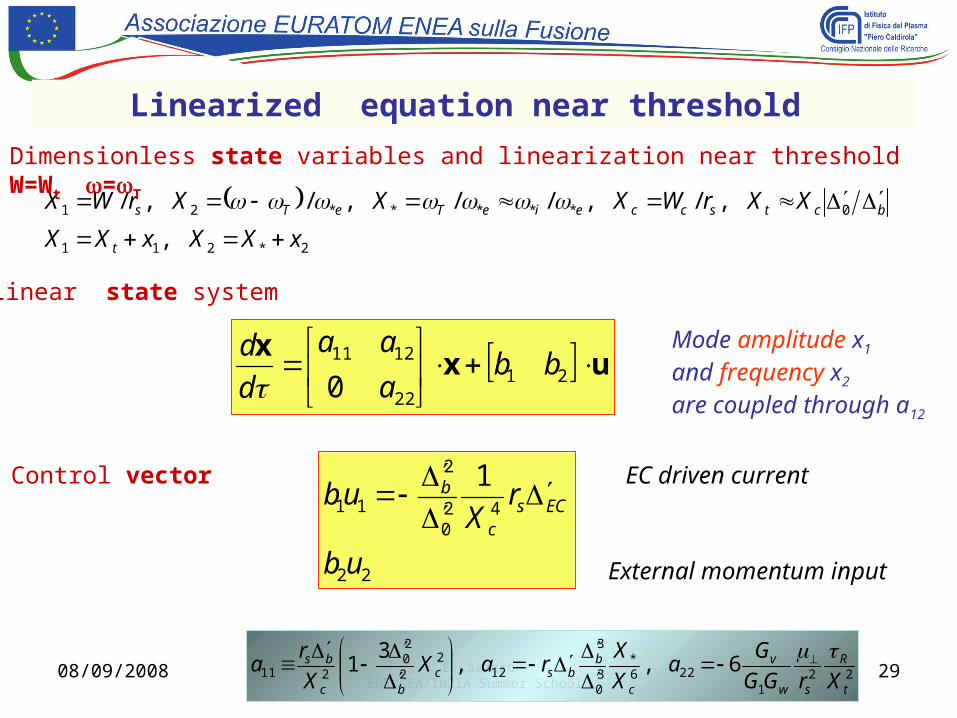
29
Linearized equation near threshold
221
226*
30
3
122
2
20
211 6,,3
1t
R
sw
v
c
bbsc
bc
bs
XrGG
Ga
X
XraX
X
ra
uxx
21
22
1211
0bb
a
aa
d
d
2*211
0*****21
,
,/,//,/,/
xXXxXX
XXrWXXXrWX
t
bctscceieTeTs
Dimensionless state variables and linearization near threshold W=Wt =T
Linear state system
Control vector
22
420
2
11
1
ub
rX
ub ECsc
b
Mode amplitude x1
and frequency x2
are coupled through a12
EC driven current
External momentum input

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
30
Controllability and observability of the system
2222
2121111
bab
bababQ
The dynamic system is controllable if its state variables respond to the control variablesAccording to Kalman controllability matrix Q= [b,Ab] must be of full rank
rank (Q)=2 if both b1 and b2 are non zero
In our case the condition, mode rotation control is necessary
22
420
2
11
1
ub
rX
ub ECsc
b
amplitude control b1
frequency control b2
EC driven current
External momentum input

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
31
Formal aspects of the control problem
• The physical objective is to reduce the ECE fluctuation to zero in minimal time using ECRH /ECCD on the position q=m/n identified by the phase jump method
• The TM control problem in the extended Rutherford form, belongs to a general class multistage decision processes [*] . In a linearized form the governing equation for the state vector x(t) is
• with the initial condition x(0)=x0, and a control variable (steering function) u(t).
• The formal problem consists in reducing the state x(t) to zero in minimal time by a suitable choice of the steering function u(t)
• Several interesting properties of this problem have been studied [*]
• [*] J.P. LaSalle, Proc. Nat. Acad. Of Sciences 45, 573-577 (1959); R.Bellman ,I. Glicksberg O.Gross, “On the bang-bang control problem” Q. Appl. Math.14 11-18 (1956)
dx
dtA(t)x(t)B(t)u(t)

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
32
Formal aspects of the control problem
• Definition [*]: An admissible (piecewise measurable in a set Ω ) steering function u* is optimal if for some t*>0 x(t*,u*) =0 and if x(t,u)≠0 for 0< t< t* for all u(t) Ω
• Theorem 1 [*]:• “ Anything that can be done by an admissible steering function can also
be done by a bang-bang function”• Theorem 2 [*]:• “If for the control problem there exists a steering function u(t) Ω such
that x(t,u)=0, for t>0, then there is an optimal steering function u* in Ω.
• “All optimal steering functions u* are of the bang-bang form”• Thus the only way of reaching the objective in minimum time is by using
properly all the power available
• Steering times can be chosen testing ||x(t|| <
u(t)
t

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
33
Concept of experimental set-up for ECCD control of Tearing modes
• “Just align” strategy:Find optimal angles a,b to minimize
• when 2121
2
/
,
),(
nmdep rrJ
˜ B Mirnov (t) ˜ B t arg et 0
rdep
(RM, ZM)

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
34
Estimate of “a priori” rdep()
4
2
00222
2
002
00
2
020
2
0
coscossin2sin22
cos
1),(
RRRRR
RtgZRr
ce
ceM
ce
ceM
ce
ce
Mce
ceM
ce
cedep
0.4 0.6 0.8 1 1.2 1.42
0
2
4
6
8
Poloidal angle
(rde
p-rs
)
7.652
0.887
dist2 0
dist2 18
dist2 9
2
0.5
Best poloidal angle for three toroidal angles (0, /18. /9)
example of minimization of | rdep(a,b) – rm/n|2

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
35
Experiments of automatic TM stabilizationby ECRH/CD on FTU
08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
36
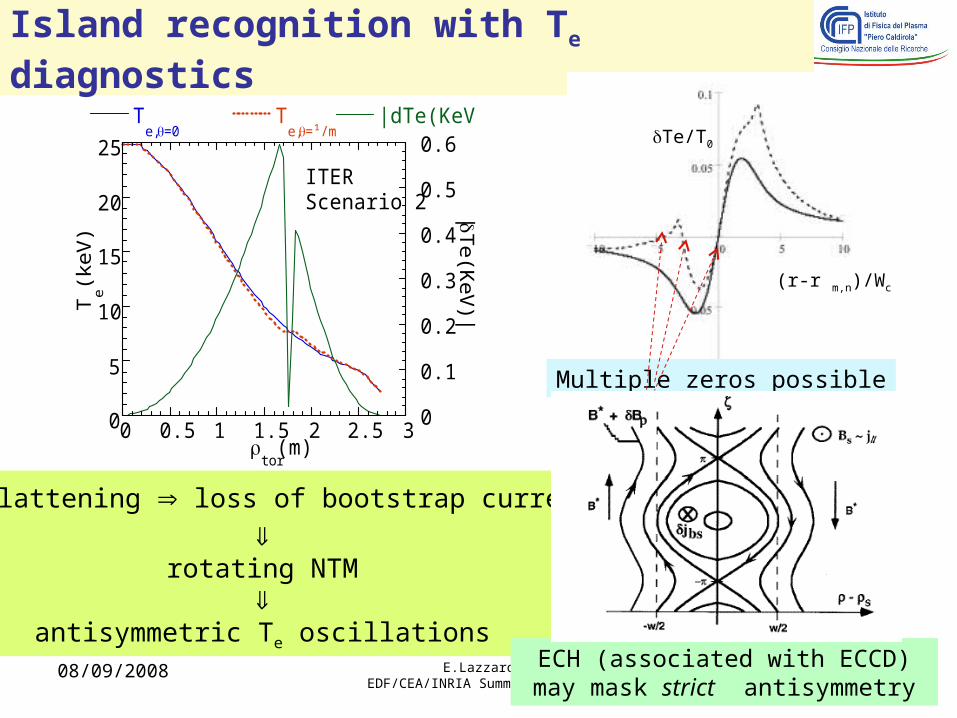
Island recognition with Te diagnostics
0
5
10
15
20
25
0
0.1
0.2
0.3
0.4
0.5
0.6
0 0.5 1 1.5 2 2.5 3
Te,=0
Te,=¹/m
|dTe(KeV)|
Te(k
eV)
|Te(KeV
)|
tor
(m)
ITERScenario 2
Te flattening loss of bootstrap current
rotating NTM
antisymmetric Te oscillations
ECH (associated with ECCD) may mask strict antisymmetry
Multiple zeros possible
Te/T0
(r-r m,n)/Wc

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
37
0
0.02
0.04
0.06
-1
-0.5
0
0.5
1
0 0.5 1 1.5 2 2.5 3
|Te| |T
e,ECE| Pij
|Te
(KeV
)|
Pij
tor
P1,2 Te(r1.)Te(r2.)cos(t)cos (t) 1 2 TAcos 1 2
Correlation of the ECE fluctuations measured between nearby channels , both for natural and “heated” islands (e.g. r1=rs-x, r2=rs+x)
•The phase jump is effective on detecting the q=m/n radius, but not “unconditionally robust”
•The concavity of the sequence of Pij is a robust observable that gives the radial position rm/n of q=m/n
Position rm/n,mea measurement

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
38
Principle of risland tracking algorithm
Pij≈ 1 if both i and j are on the same side with respect to the island O-point.
Pij≈ -1 if on opposite sides.
A positive concavity in the Pij sequence locates the island.
channels
1
-1
0
Pi j

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
39
Position risland measurement from three ECE channels
High-pass filter
Correlation
Second derivative maxima (minima)
Example of real-time data processing for O-point location in the ECEn space
Gain
J. Berrino,E. Lazzaro,S. Cirant et al., Nucl. Fusion 45 (2005) 1350

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
40
Tracking of rational surfaces rm/n
(2,1)
axis(1,1)
FTU AUG
• Finite ECE resolution (channel width and separation)• false positives (mode multiplicity, axis, sawteeth...)• intermittancy of the measurement (small island or short
integration time...)

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
41
Algorithms for real time NTM control
• Information for control from : diagnostic & process model, assimilated in a Bayesian approach
• Control/Decision variables : mode amplitude W(t) , frequency and radial locations rNTM, rdep
• Actuator basic control variables : beam steering angle , and Power modulation

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
42
Assimilation (Bayesian filtering)
p( | d)L d |
p(d) L d |
p(d) L d | IR
a-posteriori pdflikelihood function , measured data
a-priori pdf, estimated data
evidence • uncertainty reduction• continuity of the observation (even if there is no mode)• “regularize” the observation• evidence is available for confidence in the decisions
08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
43
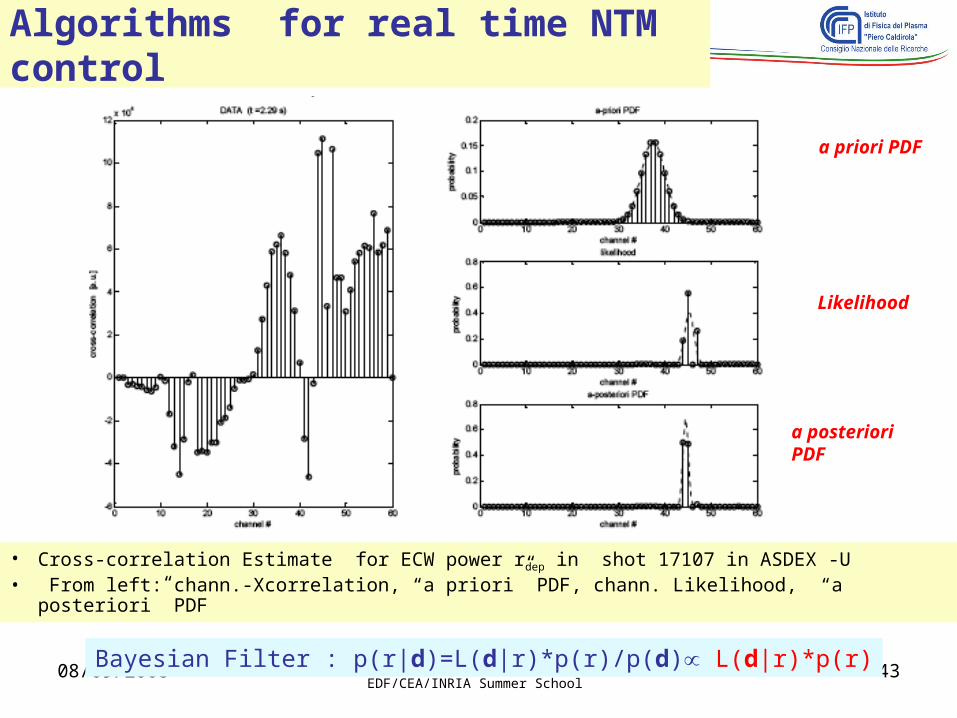
Algorithms for real time NTM control
• Cross-correlation Estimate for ECW power rdep in shot 17107 in ASDEX -U • From left: chann.-Xcorrelation, “a priori” PDF, chann. Likelihood, “a posteriori” PDF
Bayesian Filter : p(r|d)=L(d|r)*p(r)/p(d) L(d|r)*p(r)
a priori PDF
a posteriori PDF
Likelihood

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
44
Algorithms for real time NTM control
• Real time estimate ECW power rdep (t) for shot 17107 in ASDEX-U (G. D’Antona et al, Proc., Varenna 2007
• Evidence p(d)
Bayesian Filter : p(r|d)=L(d|r)*p(r)/p(d)

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
45
FTU: Btor = 5.6 T
plasma axisResonance 140GHz
mirror
ECE channels
EC beam
Gyrotron 1
Gyrotron 3
1 2 3 4 5 6 7 8 9 10 11 12
ECRH power deposition at different R by changes of the angle of the mirror

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
46
1 2 3 4 5 6 7 8 9 10 11 12-0.05
0
0.05
0.1
0.15
ECE Channels
EC
E&
EC
Pow
er3
corr
ela
tion
1 2 3 4 5 6 7 8 9 10 11 12-0.1
0
0.1
0.2
0.3
Shot 27712
ECE Channels
EC
E&
EC
Pow
er1
corr
ela
tion Gyrotron 1
Gyrotron 3
Pi,B
Pi,A
FTU Shot 27714:real-time recognition rdep
fmod,Gy1 = 100 Hz
fmod,Gy3 = 110 Hz
Plasma axis
Correlation functions of the two gyrotrons
The deposition radius of each beam is detected by the maximum in Te,ECE -ECH correlation.
Different beams are recognized by different
ECH timing.
Gy1 Gy3
Gyrotron 1

08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
47
MHD control in FTU (2 ECW beams)
t feedback ON=0.4 s action: low high duty cycle
ch.3 (gy.1 deposition)
ch.2
ch.1 (gy.3 deposition)
gy.3
gy.1
Mode Trigger (sawtooth?)
Mode hit and suppressed !
gy 3 on
08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
48
[1] Z.Chang and J.D.Callen, Nucl.Fusion 30,219, (1990)[2] C.C.Hegna and J.D Callen, Phys. Plasmas 1, 2308 (1994)[3] R. Fitzpatrick, Phys. Plasmas, 2, 825 (1995)[4] A.I. Smolyakov, A. Hirose, E. Lazzaro, et al., Phys. Plasmas 2, 1581 (1995) [5] H.R. Wilson et al., Plasma Phys. Control. Fusion 38, A149 (1996)[6] G.Giruzzi et al., Nucl.Fusion 39, 107, (1999)[7] G.Ramponi, E. Lazzaro, S.Nowak, Phys. Plasmas, 6, 3561 (1999)[8] Smolyakov, E.Lazzaro et al., Plasma Phys. Contr. Fus. 43, 1669 (2001)[9] H.Zohm et al., Nucl.Fusion 41, 197, (2001) [10] A.I. Smolyakov, E. Lazzaro, Phys. Plasmas 11, 4353 (2004)[11] O. Sauter, Phys. Plasmas, 11, 4808 (2004)[12] R.J.Buttery et al., Nucl.Fusion 44, 678 (2004)[13] H.R. Wilson, Transac. of Fusion Science and Tech. 49, 155 (2006)[14] R.J. La Haye et al., Nucl. Fusion 46, 451 (2006) [15] R.J. La Haye, Physics of Plasmas 13 (2006)[16] J. Berrino, S. Cirant, F.Gandini, G. Granucci, E.Lazzaro ,F. Jannone, P. Smeulders and G.D’Antona IEEE Trans 2005
References
08/09/2008 E.LazzaroEDF/CEA/INRIA Summer School
49
FINE