01 Brucke 2010-04-18 Networked Robotics · 2010-10-15 · Networked Robotics (definition) IEEE R b...
40
Success Through Innovation and Transfer OFFIS Institute for Information Technology
Transcript of 01 Brucke 2010-04-18 Networked Robotics · 2010-10-15 · Networked Robotics (definition) IEEE R b...

Success Through Innovation and Transfer
OFFISInstitute for Information Technology

Agenda
►Short introduction to OFFIS►Examples of R&D projects►Networked Robotics
S i l Ch ll►Societal Challenges►Markets
S►Summary
Matthias Brucke - Director R&D Division Transportation 2010-04-22

About OFFISOFFIS Institute for Information Techology
► Members:► State of Lower Saxony and University Oldenburg
► 27 Professors of IT and related studies of the University Oldenburg
B d t Hamburg► Budget:
► Income in 2009: approx. 12 million €
► Basic funding from the state of Lower Saxony approx. 32%
► Third party funding from international national and
Bremen
Oldenburg
Hamburg
► Third party funding from international, national and regional projects approx. 68%
► Performance:► Some 250 employees, some 150 full time scientists
► More than 400 regional/national/international cooperation partners
► More than 250 R&D projects since 2001
► Europe-wide network in science/industry/politics
► Various spin-offs participation in development of► Various spin-offs, participation in development of international standards
► Mission: ► Innovation through technology transfer
► Strengthening of the IT location Oldenburg
► Advancement of the Metropolitan Region Northwest Germany
Matthias Brucke - Director R&D Division Transportation 2010-04-22

CompetenciesApplication orientation + Technology Leadership = Sustainability
Application Know-Howorganizationally structured into three R&D-Divisions
ICT Know-Howtechnologically focused in interdisciplinary Technology Clusters
Matthias Brucke - Director R&D Division Transportation 2010-04-22

R&D Division Transportation
Groups► Cooperative Mobile Systems (CMS)
► Human Centered Design (HCD)
► Safety Analysis and Verification (SAV)
► E/E Architecture Analysis & Design (EEA)
► HW/SW Design Methodology (HDM)
► Process Analysis & Optimization (PAO)

R&D Division Vision
► Boundary Conditions► Further Increase in transportation of goods an
passengers► Objective: Reduction of accidents► Objective: Reduction of accidents
► Challenges► Innovationen through smart electronic systems
(Embedded Systems)► New Solutions for Safety, Sustainabiltity and cost
reduction despite further increase in complexity► Innovative driver / pilot / captain assistance system to
reduce or avoid accidents► Intelligent Transportation Systems (ITS) and smart
guidance of traffic flows► Our approach
► To provide leading edge methods, tools, and technologies for the development and construction of dependable, cooperative, and assistive systems in transportation, partnering with key industrial stakeholders.
2010-04-22Matthias Brucke - Director R&D Division Transportation

Expertise R&D division Transportation
Human modelsAssistive systems
Location Based ServicesTelematics
AutonomySystem Integration
S f t / D d bilit S t hit t H d / S ft
Matthias Brucke - Director R&D Division Transportation 2010-04-22
Safety / DependabilityCertification
System architecturesOptimization
Hardware / SoftwareImplementation
Cost

EXAMPLES OF R&D PROJECTSO S /TO BE SEEN IN HALL 14 / L20
Matthias Brucke - Director R&D Division Transportation 2010-04-22

UAV Configurations
► Quadrocopters
Guard S
► Mechanically simple (fixed rotors, no gearbox)► Any manouver is realized by changing the
turn-rate of the rotors► Underactuated configuration, not inherently
stableGuard M
► Fixed-wing aircraft► Fixed wing aircraft► High inherent stability► Higher endurance► Unable to hover
PROFILER
► Unable to hover
2010-04-22Matthias Brucke - Director R&D Division Transportation

CogniLog - Crossdocking in Cognitive Environments
With decentralized control and cooperative (swarm) behaviour:
Transfer point
Path (static)
Wireless Sensor Nodes
Transport (mobile)
Collision!
T hi l
reserved free
Collision!Human
Transport vehicle
Transport unit
Path
2010-04-22Matthias Brucke - Director R&D Division Transportation

SaLsA – Secure Autonomous Transport VehiclesSaLs
► Goal: Seamless integration of autonomous transportof autonomous transport vehicles in the material flow
► Challenge:► Challenge: ► Common environment
with workers and manned vehiclesmanned vehicles
► Providing security and efficiency
► Prediction of dangerous situations from internal and external sensor data
2010-04-22Matthias Brucke - Director R&D Division Transportation

NETWORKED ROBOTICS
Matthias Brucke - Director R&D Division Transportation 2010-04-22

Networked Robotics (definition)
IEEE R b ti d A t ti ' T h i l C itt N t k d► IEEE Robotics and Automation's Technical Committee on Networked Robots:
► "networked robot" is a robotic device connected to a communications network such as the Internet or LAN. The network could be wired or wireless, and based on any of a variety of protocols such as TCP, UDP, or 802 11or 802.11.
► 1) Tele-operated, where human supervisors send commands and receive feedback via the network Such systems support researchreceive feedback via the network. Such systems support research, education, and public awareness by making valuable resources accessible to broad audiences.
► 2) Autonomous where robots and sensors exchange data via the► 2) Autonomous, where robots and sensors exchange data via the network. In such systems, the sensor network extends the effective sensing range of the robots, allowing them to communicate with each other over long distances to coordinate their activity. The robots in g yturn can deploy, repair, and maintain the sensor network to increase its longevity, and utility.
Matthias Brucke - Director R&D Division Transportation 2010-04-22

Possible Applications (but which one is the killer-app?)
► Agriculture, Forestry, Mining, Automatic Refueling, Construction, Demolition► Courier Delivery Data Acquisition & Mobile Sensors Education/Hobbyist► Courier, Delivery, Data Acquisition & Mobile Sensors, Education/Hobbyist,► Elder Care/ Home Assistance, Equipment Maintenance and Servicing► Exploration, Explosive ordinance disposal, Fire Fighting, Food Industry Robots► Guide Information Greeting Homeland Security Humanitarian De mining► Guide, Information, Greeting, Homeland Security, Humanitarian De-mining► Humanoid and Anthropomorphic robots, Industrial\Professional Cleaning► Inspection and Repair, Laboratory, Clean room, Lawncare, Homecare
M k ti S l A i t i M di l S i l R b t► Marketing, Sales, Animatronics, Medical, Surgical Robots, ► Micro and Nano Robots, Military, Combat, Office Robots,► Picking and Palletizing Robots, Prosthetics and Orthotics,Rehabilitation, ► Assistive, Home Care, Search and Rescue Robots,Security and Surveillance► Space Exploration, Transportation, Intelligent Vehicles,Unmanned Aerial Vehicles► Unmanned Underwater Vehicles, Vacuuming, Homecare
List taken from a ETC Robotics WorkshopMatthias Brucke - Director R&D Division Transportation 2010-04-22

SOCIETALO CO O SBORDER CONDITIONS
Matthias Brucke - Director R&D Division Transportation 2010-04-22

Motivation
► Usual Approach: Technology Push, a technology is generated by improving an existing technologyimproving an existing technology.
► Better: Market Pull. First look into problems and challenges, then define requirements and then search for the right technological solution (If yourequirements and then search for the right technological solution. (If you only want to use a hammer then you need to transform aproblem into a nail)
► This is dificult for new problems or new technologies (Wildcards, disruptive developments). Evolution is sometimes better than innovation.
► Important finding: there is always a market for products which address societal challenges.
► What are these challenges nowadays?Matthias Brucke - Director R&D Division Transportation 2010-04-22

Societal Challenges
►Climate change
►Demographic Change (aging society)
►Globalization – Transportation, Logistics
►Asymetric / terroristic threats
Matthias Brucke - Director R&D Division Transportation 2010-04-22

CLIMATE CHANGE
Matthias Brucke - Director R&D Division Transportation 2010-04-22

Climate change
Matthias Brucke - Director R&D Division Transportation 2010-04-22

Challenges through climate change
Changes in the Energy sector ►Objective: CO2 Reduction►Increasing Number of decentralized power generators (wind►Increasing Number of decentralized power generators (wind,
solar)►These generators are only partially predictable and are
fluctuatingfluctuating►Smart Grid leads to ICT based coupling of producers and
consumers (prosumers, virtual power plants) ►Integration of many new players in the energy sector►Complexe Architecture of the ICT landscape of Energy suppliers
► Developments in Energy consumption► Energy efficiency (Cars, Houses, Devices)► Decentralized energy management systems (DEMS) for
producers and consumersMatthias Brucke - Director R&D Division Transportation 2010-04-22

Decentralized energy management
►Usage of „free“ energy sources : ►Wind►Wind, ►Sun, ►Geothermal energy, ►Waves, ►Biomass
►Avoidance of CO2 emissions through replacement of conventional energy sources by renewable sources and increase in efficiency
►Integration of new energy producers into the power grid is difficult, but solvable,
Matthias Brucke - Director R&D Division Transportation 2010-04-22

Why is this important for robotics?
► There will be huge number of big wind farms or solar power plants at outlying locations (Offshore DESERTEC )plants at outlying locations (Offshore, DESERTEC, …)
► There will be underwater sites to harvest resources from the deep see.
► These sites have to be build, maintained or e.g. cleaned (PV).► The pipelines to these locations have to be build, inspected or
maintained► These are tasks for service robots. Through the big number of
sites which is expected, a big number of service robots are needed.needed.
► These robots have to cooperate and will probably be controlled from a central control station
Matthias Brucke - Director R&D Division Transportation 2010-04-22

Another driver: Smart Home technology
There will be an infrastructure forinfrastructure for service robots
Smart-Metering b i ti itbrings connectivity to all private homes
Thi h t bThis has to be taken into account, when developing service robots
Matthias Brucke - Director R&D Division Transportation 2010-04-22

DEMOGRAPHIC CHANGE
Matthias Brucke - Director R&D Division Transportation 2010-04-22

Demographic change
Matthias Brucke - Director R&D Division Transportation 2010-04-22

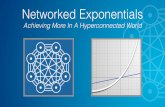
Cost increase in the health sector
Pro-Kopf-Ausgaben für den Gesundheitsbereich nach Alter und Geschlecht in Deutschland (2000)
Health cost increase when getting olderHealth cost increase when getting older
Quelle: 18. CEIES-Seminar,
Statistiken über Aktives Alter, Den Haag, 2002
Most expenses originate from careFurther increase due to increasing age
Matthias Brucke - Director R&D Division Transportation 2010-04-22
Die Gesamtrechnung im Gesundheitswesen

Demographic Change
► We will not be able to afford the high standard in medical care any longer due to aging and cost increase in the health system (without dramatic changes in the health system).
► The main cost driver is hospitalization.► Often people are kept in hospital only to monitor vital functions or because
they live alone.► Elderly people with health restrictions have to move to care facilities too
early.► People could leave hospitals earlier or could delay there move into care p p y
facilities by the usage of telemedicine and service robotics in their private homes
► Private homes will be medical and care facilities in the future
Matthias Brucke - Director R&D Division Transportation 2010-04-22

Ambient Intelligence und Ambient Assisted Living
Idea: Embedding Computers into the environment (Mark Weiser, Xerox, 1988).
USA = Pervasive Computing, Ubiquitous Computing
Europe = Ambient intelligence = Environmental
Ambient Assisted Living: increase the quality of live mainly for eldery people by smart networked technical systems which are integrated in the environment.
Objective: Prolong the time elderly people can remain in their own homes atObjective: Prolong the time elderly people can remain in their own homes at a high quality
Matthias Brucke - Director R&D Division Transportation 2010-04-22

AAL and service robotics
Through ongoing research in the area of AAL ecosystems will come into existence which are ideal environment for service robots.
Service robots should be developed taking into account, that these ecosystems will exist. A simple transformation of industrial service robots to use them in private households will probably not workrobots to use them in private households will probably not work
Technology for eldery people must be developed together with end users and should try to solve their problems (Keep it small and simple)y p ( p p )
To replace caring people by robots will not work. Instead of that assistive functions should be implemented in robots (e.g. Bath tube lift)
Matthias Brucke - Director R&D Division Transportation 2010-04-22

Examples of service robots in private homes (1)
Matthias Brucke - Director R&D Division Transportation 2010-04-22

Examples of service robots in private homes (2)
Matthias Brucke - Director R&D Division Transportation 2010-04-22

Is this the future in health care?
Matthias Brucke - Director R&D Division Transportation 2010-04-22

ROBOTICS WORLD WIDE –S SMARKETS AND NUMBERS
Matthias Brucke - Director R&D Division Transportation 2010-04-22

Comparison of robotic activities worldwide
Source: SRA of the
Matthias Brucke - Director R&D Division Transportation 2010-04-22
Source: SRA of theETP EUROP

Comparison of robotic products worlwide
Source: SRA of the
Matthias Brucke - Director R&D Division Transportation 2010-04-22
Source: SRA of theETP EUROP

Aplications
Matthias Brucke - Director R&D Division Transportation 2010-04-22

Performance of robotics companies in 2009
Matthias Brucke - Director R&D Division Transportation 2010-04-22

Market development by sectors
Matthias Brucke - Director R&D Division Transportation 2010-04-22
Quelle: Japanese Robotic Association

Conclusion (1)
Cl i l“ b ti i t h l i t d d b ti d t► „Classical“ robotics is very technology oriented and robotic products are used in cooperative environments (Automation, Production)
► By developments in ICT robots become more mobile and more powerful.► By developments in ICT robots become more mobile and more powerful.
► Importance of ICT is increasing, importance of classical robotics (mechanics, engineering) is decreasing
► Important: Safety, verification of correctness is crucial -> Safe Embedded Systems
► The productive usage of networked mobile robots in „non-cooperative“ Environments will be possible in the future.
► Robots will cooperate with each other but also with their operators and► Robots will cooperate with each other but also with their operators and with the environment.
Matthias Brucke - Director R&D Division Transportation 2010-04-22

Conclusion
► Main application area and main market: service robotics
► Offshore or outlying sites for renewable energy Task: Building► Offshore or outlying sites for renewable energy. Task: Building, maintenance, inspection
► Private households: decentralized energy management and AAL will id t i t th d i id t S iprovide smart environment, other devices provide ecosystem. Service
robots can use other devices, but must be capable of being integrated
► An orientation of development activities to societal challenges (climate► An orientation of development activities to societal challenges (climate change, demographic change) will lead to products which will be marketable, because there is a market
See “A tonomo s S stems and Mobile Robots” in Hall 14► See “Autonomous Systems and Mobile Robots” in Hall 14
► OFFIS demos at Hall 14 booth L20
Matthias Brucke - Director R&D Division Transportation 2010-04-22