0 STOL TRANSPORTS · PAGE Z L 1.0 2.0 3.0 4.O 5.0 6.0 7.0 8.0 9.0 10.0 0 0 I REV SYM. 1.0...
204
NASA CR-114454 Available to the Public DESIGN EVALUATION CRITERIA FOR COMMERCIAL STOL TRANSPORTS By R. L. Allison, M. Mack, P. C. Rumsey D6-40409 JUN 1972 Distribution of this report is provided in the interest of information exchange. Responsibility for the contents resides in the authors or organization that prepared it. Prepared under contract NAS2-6344 by THE BOEING COMPANY Commercial Airplane Group P. O. Box 3707 Seattle, Washington 98124 for Ames Research Center NATIONAL AERONAUTICS AND SPACE ADMINISTRATION dNATIONAL TECHNICAL INFORMATION SERVICE 0 c,4 rq 0 a r- M cN z- 2: U) M - N 0 rr) E-4 Uq U U H 4cl U I Ctr tX e 0 I E; (N _E: 4v IU a ,(A)E da https://ntrs.nasa.gov/search.jsp?R=19720023370 2020-03-11T19:27:54+00:00Z
Transcript of 0 STOL TRANSPORTS · PAGE Z L 1.0 2.0 3.0 4.O 5.0 6.0 7.0 8.0 9.0 10.0 0 0 I REV SYM. 1.0...

NASA CR-114454Available to the Public
DESIGN EVALUATION CRITERIA FOR COMMERCIAL
STOL TRANSPORTS
By R. L. Allison, M. Mack, P. C. Rumsey
D6-40409
JUN 1972
Distribution of this report is provided in theinterest of information exchange. Responsibility
for the contents resides in the authorsor organization that prepared it.
Prepared under contract NAS2-6344 by
THE BOEING COMPANYCommercial Airplane Group
P. O. Box 3707Seattle, Washington 98124
forAmes Research Center
NATIONAL AERONAUTICS AND SPACE ADMINISTRATION
dNATIONAL TECHNICAL INFORMATION SERVICE
0c,4
rq
0
ar-McNz-2:
U)
M -
N0
rr)
E-4 Uq U
U H
4cl U
I Ctr
tX e0 I E; (N_E: 4v
IU a
,(A)E da
https://ntrs.nasa.gov/search.jsp?R=19720023370 2020-03-11T19:27:54+00:00Z

tsAA CR-.1144'5)
Available to the Public
DESIGN EViAL.U;I'ON CRITERIA FOR COI.EMRCIAJ
STOL TP..LiSPOPt: S
By R. L. Allison, M. M4ack, P. C. RhImsey
D6-40409
JUN 1972
Distribution of this report is provided in theinterest of information exchange. Responsibility
for the contents resides in the authorsor organization that prepared it.
Prepared under contract NAS2-6344 by
THE BOEING CCM;PAIiYCommercial Airplane Group
P. O.-Box 3707Seattle, Washington 93124
forAnes ?Psearch Center
NATIOINAL AE ROIAJTICS A]D) SPACE ADiMIDISTRATION
.1. .. .I ? -

Handling qualities criteria and operational performance margins
have been determined for the landing phase of commercial short-
takeoff-and-landing airplanes. The requirements are the result
of a literature survey, analysis of areas found to be inadequately
covered by current criteria, and a subsequent piloted simulator
investigation of critical criteria requiring substantiation.
Three complete simulator models were used, each describing the
characteristics of a different high-lift system, the externally
blown flap, the augmentor flap, and the internally blown flap.
The proposed criteria are presented with substantiating discussions
from currently available data or directly from the results of this
simulation work where it is applicable. Further work is required in
some areas where time limitations prevented full investigation of
all three concepts or complete analysis of a given criteria topic.
The requirements are offered here as a starting point, and a base
for the evaluation of competitive STOL designs.
0
6,
0
REV SYM ~''~EP~'/,~v ,~"- 4 a o / Z_-PAGE f
ari
. r

Table of Contents
Introduction
Operational Environment
Operational Margins
Control System Characteristics
Longitudinal Control
Longitudinal Stability
Lateral - Directional Control
Lateral - Directional Stability.
Comparison of Criteria From LiteratureSurvey
References
Page
i8
158091
163
165
182
186
200
Detailed breakdown of each section will be found onthe pages listed.
BOWEAV'G jNO. Da 42 c 5PAGE Z L
1.0
2.0
3.0
4.O
5.0
6.0
7.0
8.0
9.0
10.0
0
0I
REV SYM

1.0 IITRODUCTION
The work reported in this document was performed under Contract I1iS2-,43 ,4
to oS.A-Acs Research Center. The purpose was to cunduct research into the
flying qualities of some typical commercial STOL transport designs in order to
contribute towards a statement of criteria for the performance margins and
handling qualities required for STOL operations. These criteria could then be
used in the design definition and evaluation of competing STOL high lift
concepts.
The research was restricted to the landing flight phase including approach,
landing flare, roll-out, and go-around. The investigation concentrated mainly
on the longitudinal performance and handling qualities since the lateral/direct-
ional requirements were already well covered by existing literature. A small
amount of engine failure work was accomplished.
A literature survey was conducted to establish current regulations and
criteria and to define the areas requiring further investigation. Direct
comparisons of existing requirements from various sources helped in the
definition and planning of the piloted simulation work that is reported in this.
document.
Three proposed STOL transport configurations were modeled in the
simulator: the externally blown flap (EBF), the internally blown flap (IBF),
and the augmentor wing (AW). A common approach speed was chosen at 80 knots
which was considered to be consistent with the 2000 foot field length for the
gross weight range of these airplanes. The augmentor wing airplane was designed
to pass 80% of the total engine air flow to the trailing edge flaps. Space
requirements for the ducting in the wing necessitated a low wing loading by
o CTOL standards for this configuration. The internally blown flap configuration0
V used 12 to 15%;o of the engine air to blow the leading edge and trailing edge
0flaps, and the externally blown flap used an 8% bleed to the leading edge only.
REV SYM A iFA NO. -40409 ..IPAGE 1
I

The engine positioning on the L3F wing was carefully chosen to give favorable
thrust imnincement on the flaps, wrhereas on the IBF the engines were placed
to avoid jC t exhau:.st i..nterfer.n...e with t.-+r' tlle edge fla p -.. V
Seperate longitudinal Stability Atuentation Systems (SAS) were designed
for each configuration. The SAS feedbacks, feedforwards, and control inter-
connects were used to vary the airplane handling characteristics so as to
define acceptable and unacceptable values of postulated handling qualities
parameters. Different SAS types were used to evaluate different piloting
techniques for control of flight path and speed. Two main SAS types emerged
from these evaluations and their form is described in detail in Section 5 of this
document. In other sections, the two SAS types are referred to as:
(a) Minimum SAS - describing an augmentation system that has pitch rate
damping and attitude hold features tied to the elevator, and flight
path rate fed back to the engines to improve the control of flight
path angle with throttles.
(b) Full SAS - describing an augmentation system using similar feedbacks
to (a) but including also the use of auxiliary flap or main flap
modulation controlled by stick and throttle movements, and having
speed, angle-of-attack, andApath acceleration feedback signals.
This SAS also includes an interconnect from the column into engine
thrust.
Neither these augmentation systems included typical amplitude and rate
limitsexcept those imposed by full control deflection, maximum engine thrust
or acceleration capability. The SAS was used simply to modify airplane handling
qualities for the purposes of this research.
The aerodynamic data used in modeling the three concepts had different0
sources which influenced the flying qualities of each type. The Augmentor Win;
o
REV SYM gAG jNo. D;-40409 PA.i.
IPAGE d

0
was modeled on wind tunnel data(from the Ames 40 x 80 tunnel)corrected to
the chosen wing planform and flap configuration. The EBF data was derived
from theoretical techniques modified. emoiricaily by data from INASA and
Boeing wind tunnel tests. The IBF aerodynamic build-up was almost purely
theoretical using Set-flap theory with some small corrections from British RME
data. The resulting Augmentor Wing data retained significant non-linearities
associated with the wind tunnel model from which it was derived, whereas the
EBF data was averaged from a number of tests with the non-linearities faired ou.
Differences in handling qualities between the airplane types are therefore
mostly due to the different levels of accuracy of the aerodynamic data modeling.
The results of the tests are not presented as a judgement of one concept
against the other, but rather as an indication of the effects that non-
linear data can have on total airplane handling qualities.
The three configurations covered a range of possible aerodynamic character
istics against which the proposed criteria could be judged. Further work
is required to fully prove these criteria,and statistically designed ex-
periments are needed to Justify the rational approach to landing field length
determination.
The criteria are specifically identified in each section of the document,
and backsground material for each is presented in the discussion sections
which appear after each stated criteria. This layout gives freedom to include
as much of the simulation results as possible in this document. The proposed
criteria are offered as a starting point for further research, and as a base
for the evaluation of competitive STOL designs.
00
REV SYM -E B ZA'4= NO. D -40409 IP E IPAGE 3

1.1 List of S]ybols
Blo.wn, Thrust (lbs)e...--..- "U -
blowing momentum coefficient
Coefficient of lift
Maximum lift coefficient available at the value ofCJ at which the airplane is flying.
C.CLAXCJA
CLWB
CMe
FGB
FS
h
LU,V,W
,Ls
Nz,nz
Po0/PAV
t
t-a
TD
T/w
Maximum lift coefficient available at the vralue ofCJ computed with maximum thrust.
Lift coefficient of wing and body alone
Lift coefficient due to elevator deflection
Pitching moment coefficient due to elevator deflection
Blowing thrust value, lbs.
Pilot's stick force, lbs.
Airplane altitude, feet
Characteristic length of turbulence, feet.
Rolling moment due to control deflection, ft-lbs/deg
Normal acceleration, ft/sec2
Ratio of the oscillatory roll rate response to theaverage roll rate response to a step wheel input
Pitch rate, deg/sec
time, secs
The time required to achieve a positive change in rateof climb following an aft column step input, secs.
The time taken to reach a bank angle 0 in a maximumcontrol roll maneuver, secs.
Dutch roll period, secs.
Thrust to weight ratio
REV SYM 0 4 Vf NO. 6-401hQPAGE 4
onP10
m*1
CJ
CL
CLAXCJ
0
0
r.
c
oTo
To
F.
01
+-

V
Vlov10
VWIND
VMN
MCA
Wo0
ZW
aot c(iwi
The time required to achieve a positive change inheading angle following a right wing down roll input,sees
Equivalent air speed, knots
Crosswind velocity at 10 feet altitude, knots
Steady wind speed, knots
Minimum demonstrated speed in stalling maneuver, knots
Minimum speed at which straight flight can be maintainedwith one engine failed and less than 5° of bank angle kes
Wing loading, lbs/ft .
Initial rate of descent, ft/sec
Normal force due to vertical velocity, heave damping,lbs/ft/sec.
Angle of attack, degs.
Wing angle of attack, degs.
B Angle of attack referred to body axes, degs
Sideslip angle, degs.
Auxiliary flap deflection, degsAUX
SCOL Column deflection, ins
gp Pedal deflections, ins.
7THL Throttle deflection, ir5..THL
oWx Wheel deflection, degs or inches
Flight pathangle, degs.
alT Effective inclination of thrust vector includinginterference effects with wing aerodynamics, degs.
au, v, w, ref r.m.s. level of random turbulence, ft/sec
Coefficient of braking friction on runway
g d Dutch roll damping ratio
.ffPwtOWrY NO. DO-40P409
PAcGE 5
aI
n
o0o
oCr
0
- o
o
REV SYM
III' 0(

Effective single degree of freedom time constant ofNzi load factor rcsponse, scc%
R:, Effective single degree of freedom time constant of.~R ~ roll espon;ser ; ~e. -
Frequency of dutch roll oscillation, rads/sec
Frequency of short period oscillation, rads/sec
0, Pitchangle, degs.
0Roll angle, degs
0l/s. Roll angle achieved in one second due to a unitdeflection of roll control, degs/inch
Ratio of the oscillatory bank angle responseOsc/ 0Y to the average bank angle response to a
pulse wheel input
Heading angle, degs
Common subscripts:
SS - steady state
Max - maximum value
app - at approach trim conditions
(') - a_4 C )
(.)- c
O
REV SYM . .a V ,Af, I. t6-4h4otO A
IPAGE 6

2.0 OPERATIONAL EIIIROIGMIT'
2.1 Wind and Turbulence
2.1.1 Steady Winds
2.1.2 Random Turbulence
2.2 Weather Minima
2.3 Terrain Clearance Plane
2.4 Allowable Noise Footprint
2.5 Runway
2.6 Aircrew
8
8
-9
9
9
10
10
0£C,r.
0
a0o
o
REV SYM D6-40409
PAGE 7
q01-1
I,r
JI
-1

2.0 OPEIIATIONttL ElM"ROSIROtNT
This section defines the assumed operational environment used in the dez/g:
o `h;Se th:ee STOL airplanes and ini the plnr&in &t tdest codit.iclis for the
piloted simulation work. This study was directed towards the landing and go-
around phases of the flight profile and only these conditions are dealt with.
At this stage in the development of commercial STOL transportation systems
very little is known of the likely airport sizes or sites which may be avail-
able. The choice of turbulence levels, clearance planes, runway sizes, etc.
is therefore an arbitrary one, although necessary for the assessment of handling
qualities and operational suitability of proposed STOL designs. The follow-
ing definitions are therefore a first cut which the three STOL airplanes were
designed to meet without excessively large penalties.
2.1 Wind and Turbulence
A modified version of the wind model defined in Reference 1 was used.
This assured consistency with previous STOL handling qualities investigations
performed at NASA Ames Research Center.
2.1.1 Steady Winds
The tendency in airport planning towards single direction operation, and
the further restrictions which will occur with STOL strips situated in narrow
access corridors, is causing airlines to demand higher and higher crosswind
capability from short-field airplanes. Ransome has suggested (in Reference 2)
that the design cross-wind be at least 25 knots and perhaps as high as 35 knots.
Other airline feedback to the Boeing Company has suggested that a 30 knot
crosswind measured at a height of 10 feet is an acceptable minimum for future
airplane design. As discussed in Section 7.1.2, a 30 knot cross-wind was chosen
o for this study since the design penalty for the required rudder and lateral
control power seemed reasonable at approach speeds above
REV SYM F INO D6-40!4oPAGE 8

70 knots.
The wind shear profile used is shown in Figure2.1-1, and was recommended in
Reference I. For the design crossirnnd level, Vl0 = 30 knots.
2.1.2 Random Turbulence
The RPeference 3 turbulence model was used with the Dryden snectral form.
The r.m.s. turbulence levels in two axes, Cu and Cv, are kept constant at
the reference level, 0 Ref . The variation of 0-w with altitude is shown on
Figure2.1-2, and of Lu, Lv and Lw on Figure2.1-3. The maximum turbulence level
for normal handling qualities was set at the .01 probability level for clear
air turbulence (non-storm) as defined in Reference 3.
2.2 Weather Mlinima
The majority of the piloted simulator investigation wras performed in VFR
flight conditions. Critical flight path control tasks were repeated under
simulated IFR conditions with breakout at the Category II minima. No investi-
gation has been made of Category III requirements.
2.3 Terrain Clearance Plane
The FAA has defined minimum flight path requirements and protection
surfaces for STOLports in Reference 4. Ransome (Reference 2) has requested at
least a 6° climrb-out capability with all engines operating, and a 1% gradient
above the FAA protection surface for the engine failed condition. This latter
case would appear to be a reasonable minimum, and also consistent with the need
for minimizing noise on the ground and providing a flexible performing airplane
that can fit into and around existing ATC routes.
2.4 Alloiwable Noise Footprint
The aim of introducing jet-powered STOL aircraft into short fields built
inside existing communities is going to require considerable reduction in the
D- lF Z I No. D6-40409
PAGE .9--
c0
P.0
,I
00
REV SYM
0

noise levels emitted by these airplanes. A suitable goal would seem to be
to produce a noise level below the residual level of the surrounding cormmunity.
A first da _'it'cn of t;hi- ;'roulJ bto ^confr.ie tho 80 ri B contour within a
box 20;COO feet long by 4,000 feet wide centered on the runzway.
2.5 .runi,-y
Runway width and markings are laid out in Reference 4. The glide slope
location relative to the threshold and the touchdoom aiming zone have an
impact on touchdown dispersions as discussed in Section 3.5. It should be
expected that STOL runways will be grooved, and possibly heated, to maintain
a reasonable minimum friction coefficient, / = .2.
2.6 Aircrew
Cockpit layout and systems design should be consistent with the concept
of a two man crew. It should be possible for either crew memoer to fly and land
the aircraft in an emergency. The piloting task should not require exceptional
skills or extensive special training.
. ,'
00
REVSYM -EAx NO. D_40409 PAGE 10
- -I

1~Ir-J.10L,I,
00
a0If
Qi
...i0
0
ci-IIL.00.-i
UoJI!
0>i0
e 0IiI>
W -
x
..
I.I1.
.
CAI
/ ',l
.'
:.c ~
'-.'¢ ~"t i I-:,:;·.",
AL
U:¢~
.IAI 1 .....
CH
,-!Coi
APR7
1-2 '- .1.
Ii
PL
O.O
ALFI,
;, .
'P
r"~
F
~S
~-h
~V
~
TH-E L ,.. ;.:',,
O,',,A
,'AN
Y
L~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~_,,_
-- - --I
_____
jt C2 .I-1 -
I
4--.L
.--
j.I711-(U
.
01D 410)
3.4
.1
0FOC)
RH 0-C)
6' oG8
a-oI.
i
\I
uJI-
-..
_g k- i
)
.-0I
0CmuM
~~~L~sr~~rZ-rrB~~F·~~·rrrrr ~
~ m
WM
q -A
am
. a a ,- m
m
3m ~-tYv m
n-r%
3W
,-4
·~~~~~ ~~~
.: t !
..
7 ..-
.:
.-.
· :
......... ;. ~:·
.?
................ i
~ '....i ;:
::
i.
· ,
..
.-
: .
·'
.. :'
i'"':-:'~":
.... .........
! -..
~ .
-.."
....'.!.'
L;. .....'.:..'
..... L ......--
......'
...
' '
: ~
-.
: ·
.,.
· .
· .
:-----:. ....
i--:'r
--- "i ....
:'."
........... ·
....
"~
' ' -
, : ....
.'
'i :'7
'"'
' "
i i iii 11icli
t : I
..

FI.o .
,.... .
\- n
0
-JI h
I\I; ....
.. .
..
0~
~~
~~
V~~I
'.. .
-Lt,
.'.I"I' U ,
.\
.
:S '
\0
I ~
~ ~
~ ~
~ ~
C
0~
..... b 8vL
2
~...
.. .
.. .,..
*i- \
1>~~~~~1.;
: i
0
-~\
.o oo
-
.. U
. .
....
... IJ-.
' '
* '' ........
..... '-.. : :- i'~
'
' '
: ,
..... ;....
.. ..
: ..
'.
0 ..
: JJ
...... :,,
.......
ii i
i~~
~
..... .....
b ~
~..
! -"
CA
LC
A
tso,'
r.. I
I D
IA
7E
*L
Cq
_
_A
U-S
o,,
1_
'.:'_7
,,',sD
_E
--l R
NS
V
EL
OC
ltl-'S.
FC'.R
R
.AN
OZ
3, D
6-404097
~~~~AP
R
____
LT
USL
TL
E:4C
..,J f"¢O
-.tL
PR
-
THE
EOEl.'[G
CO'"'' 'Y
'" I
j~~
~~
~~
~~
~~
~~
10D
41(1
0
:32
40
I
IIIIIiI
*0,., P.
.r -..e
w
.

IL0¢/.e0IiIJII
-J
.O
.
.. .....
.... I
* ~~~I!
..!!ii l
..i
!!. .' .
.
i*
ti i
HI
L.
t 9
N
-;n-v
llz-1
CJLC IA
LL
'_ ,
N.'O.~ j~', ;,rG
V'J!D
.:
.A?-
c~licr --
__
_
_ .
' L.
r.---, ._'
FS O
'-r P.S..-D
O.~..A
D
6 -404009
AP
R
I __
TI 'E
B
OP
'R
'-
[ C
O '
AY
!3"'
: _
_ _
._
_ _
..
II, I A
l A
N1 N
.. .
, _,
I-xL7lItJU-
Li..
'- 1
to}
-I
I <
0I w
.-
.I ..
:i i
O
-
0 _
ii
II ,IIII
I
I
..
:.-.., ..
V %
I ,
-,1
-i
..
:
.. .
.
'~ 4
j). " 3%
)

Paa7
3.0 OFP;\TIU~!:A idGLh -
3.1 General 15
3.2 Lift Margins 18
3.2.1 Maneuver Requirements 19
3.2.2 The Effect of Stability Augmentation 22
3.2.3 The Effect of Turbulence 25'
3.2.4 The Effect of Landing Flare 25
3.2.5 The Effect of Turns and Maneuvers 31
3.2.6 Margins at Low Power Settings 32
3.2.7 Choice of Lift Margins for Maneuvering 42
3.2.8 Protection From Gusts 43
3.2.9 General 46
.3.3 Flight Path Margins 50
3.4 Speed Margins -53
3.5 Touchdown Dispersions 55
3.5.1 Statistical Analysis 56:
3.5.2 Effect of Load Factor Response on Touchdown 61Characteristics
3.5.3 Effect of Piloting Technique on Touchdown 64Characteristics
3.5.4 Comparison of EBF and AW Configurations 64
3.5.5 Comparison of Touchdown Dispersions With FlightPath Parameters at 50 Feet 65
3.6 Landing Distances 72
REI r Oz-K .N D6-40409REV SYM
BCIE~~~ HI · 'IPAGE 1L+

3.0 OPZRATIOINAL MAJIEDS
3.1 General
Criteria: The choice of operational margins must provide protection fro:.,
uncontrollable flight conditions yet allow sufficient maneuvering for completion
of approach positioning, landing, or the go-around procedure. The requirements
may be classified into four categories:
1. Provide adequate maneuver capability to perform the functions that
are required of the airplane.
2, Provide a margin in angle-of-attack to prevent dangerous loss of lift
or loss of control due to atmospheric disturbances.
3. Provide a margin in speed to prevent dangerous loss of lift or loss
of control due to speed deviations from the reference speed.
4. Provide capability to maintain the desired flight path at speeds
less than the target speed.
The choice of operational landing field lengths should reflect the
consistency with which the flare and braking performance required can be demon-
strated. Typical environmental conditions that may be encountered in routine
commercial operation must be taken into account as well as the effects of likely
powerplant and system failures.
Discussion: The operational margins used by today's airplanes have been
derived and developed from many hours of commercial jet operations, accumulated
over a number of years flying into and out of a variety of airports in
extremes of atmospheric conditions. In terms of lift margins,today's require-
ments are simple and are quoted as speed marginsfrom a stall speed measured under
F carefully defined maneuvering conditions. Climb gradients and field length
requirements have grown from operational e:cperiences and are known to allow
REV SYM - GG A NO. DS-40409|PAGE 17
.

operation from most of the world's airports without large off-loading penalties.
The related lift, thrust, and angle of attack characteristics of a typical
powred lift STOL airplane renders thins saii.c-concepr of speed margins in-
adequate. The basis for the proposals in this section is that the capability
of current conventional aircraft should be matched in terms of maneuvering margin
and margin from stall in gusts, but not necessarily in the speed margin. This
latter exception is partially justified by noting that in-service flying
records demonstrate that speeds below the reference value are rarely recorded.
In fact, pilot's make every effort to stay fast by the addition of speed in all
critical cases such as gusty weather, high winds or for heavy weight conditions.
Typical records of landings show that touchdown speeds average only a 5 to 10i
speed decrease from the speed on approach. The conclusion is that the currently
required speed margin is more truly indicative of protection from elements other
than inadvertent speed decreases. Such decreases must still be taken into
account, however, but the existing margins could possibly be reduced or
replaced by other equivalent protection."
In the same way, the landing roll-out and take-off operation for STOL is
very different from conventional operation. When aircraft body lengths approach
10 of the total available rurrnway a more rational approach has to be taken to
generating field length margins than the existing application of an overall
factor. Following the approach outlined in Reference 5 the present study ran
a number of simulated landing tests,and the resulting touchdowm and roll-out data
has been analyzed on a statistical basis to help draw conclusions concernirn the
important parameters affecting consistency of touchdownm performance.
These analyses are simply a beginning. It is obvious that much more data
in the simulation area, and in actual flight operations, will be necessary
REV SYM 'a ,' |NO. D6;-40409
PAGE 16

before hardened criteria can be adopted concerning operational margins. But,
the nroposed criteria have been demonstrated to b2 sufficient by the testing
conducted in the present study, and they are therefore cffered for use as a
baseline for evaluation of competitive STOL designs.
mOP-rj, [,NO. D6-40409
PAGE 17 +-
0
I
o
I
00
P.oP.
Lof
c
o
REV SYM
__

3.2 Lift Margins
Criteria: The choice of reference speed and configuration for the approach
shall provide a margin of lift f..ro stel -ri to cater for the acceleration
requirements of Sections 5.4.1.1 and 5.4.2.1, and the flight path control re-
quirements of Section 5.4.1.2.
The choice of reference speed and configuration for the approach shall
provide a sufficient margin of lift and angle-of-attack from lin- stall or from
loss of control about any axis to cater for:
1. A haneuver up to an incremental .5 g, with all engines operating at
maximum power.
2. A maneuver up to an incremental .35 g, with all engines operating
at the trim power for the landing approach.
3. A step gust of 20 knots T.A.S. normal to the flight path, with one
engine inoperative and the remaining engines set at the power re-
quired to maintain the approach glide slope at the reference speed.
Discussion: - The airplanes simulated in the present study were designed
to meet a series of conservative margins formulated from a comparison of the
capabilities of conventional jet commercial transports. The single lift margin
used by current airplanes acts as a margin for maneuver, speed errors, angle-
of-attack protection in gusts, an.d for recovery from wind shear. The inter-
action between thrust setting and lift for the propulsive lift systems used
by STOL airplanes requires that these individual margins be treated and applied
separately with carefully defined power settings, speeds, and configurations.
This approach assumes that the margins used in today's jet operations are
e critical in all phases and that the future of jet STOL operations will occur0
in similar environmental conditions. Neither of these assumptions is02 necessarily correct. , .
REV SYM - NO. D'-40409
PAGE 18

0
Section 2.0 of this criteria document defines the environment selected to
represent a first proposal for the definition of STOLport weather conditions.
It was an aiam of the preset study to defixne IIO-e clearly the margin require-
ments for STOL operation in this selected environment.
3.2.1 Ianeuver Requirements
The normal maneuver and control requirements for the STOL landing and
appro ah phase are presented in detail in Sections 5.4.1.1 and 5.4.2.1. Because
these are normal operational maneuvering requirements they are expressed as
margins from stall warning (inherent or artificial), not from CLax.
Other maneuvering requirements, more usually measured as margins from
CLI:;, are for protection from gusts or for gross collision avoidance maneuvers.
however, the interconnected lift and thrust characteristics that are a vital
feature of the STOL concept allows the available lift margin to vary with
powfer setting. These characteristics may lead to a new requirement for a margin
to cover likely operational conditions where flight parameters may momentarily
reduce otherwise specified margins to very low values. The equivalent case for
CTOL is covered by the knowledge that the lift margin available is independent
of engine thrust setting, and monitoring of speed alone will ensure sufficient
maneuver capability in all flight phases.
Theoretically speaking, the 30` speed margin currently used for CTOL
operations should yield an incremental acceleration capability of .69 g before
stall at constant speed. However, due to the dynamic nature of the demonstra-
tion maneuvers used to define the reference speed, VMII, the actual normal
acceleration margin to the break in the lift curve slope ranges from about .42
o to .59 incremental g for a typical family of commercial jet airplanes. If it
is assumed that these margins are critical for safe operation, and that theo
REV SYM :O =NO. D540409 PAGE 19
-I-

0
requirement is independent of aDproach speed, the STOL airplane should be
designed to match this capability. To understand the validity of this assmp-
tion, the three high-lift STOL tyues used in the oresent stud]y were desig.ed
to meet the most critical of a set of perfcrn.ance margins which equal the
maneuver capability and gust penetration ability of today's jet transports.
These margins are listed in the criteria comparison of Section 9.0. The lift
and angle-of-attack margins which resulted (for level flight and for descent on
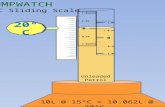
the glide slope) are shown on Figure 3.2-1. Operational type evaluations were
then made of these airplanes, although limited simulation time allowed a
thorough examination of only two of these types, the augmentor wing and the
externally blown flap aircraft.
The variation of lift margins during operational maneuvers in calm air and
in turbulence was investigated by means of continuous recordings of the follow-
ing parameters:
(i) Instantaneous lift coefficient, CL, measured at the instantaneous C(w
and power setting.
(ii) M~axiLum lift coefficient, Cox, available at the.instantaneous
power setting and speed..
(iii) Maximum lift coefficient, C available at maximum power
at the instantaneous speed. M--X
All lift coefficients are for the tail-off airplane including ground
effects. For easy comparison, the first two parameters were recorded on time
shared traces, and the instantaneous lift coefficient, CL, was also displayed
in the ratios CL/CIXC
and CL/C-,XCJAX
JMJAXThe variations of these parameters help to illustrate the advantages
o
and disadvantages of the powered lift concepts from the point of view of0
lift margins, and a number of examples are given here as background material.
REV SYM AffA7 | DIS-N0.9... ~~ ~~ P~JzJ . o.mU
IP AGE
. r

LTIT'r MARGI' N STU5LARY - NASA A!M'S JET STOL AIRPIAN?,:
TRIM SPEED8 Kt s
TRIMA w
TRIMThrust
/oe
TRIMC,
=W
SSw
aCLtLmr ..
attrimthrust
at
atmax.
thrust
A CC atTrim Thrust
degs.
A CC r rn tda ntv[ax. Thnrust
dews.
AugmentorWingFwd c.g.
' = 0 -2.50 74.0 3.58 1.81 1.98 35.2 37.7
Y = -6 5.0 45.5 1.64 2.05 32.8 30.2
ExternallyBlown FlapAft c.g.
¥ = 0 7.7 65.9 4.64 1.63 1.82 23.9 23.9
f = -6 12.7 39.7 1.40 1.86 17.3 18.9Fwd c.g.
f -6 13.4 43.3 1.39 1.78 17.4 18.2
InternallyBlown FlapFwd c.g.
Y = 0 5.8 72.0 4.80 1.35 1.39 20.6 20.8
7 = -6 7.3 49.o 1.31 1.39 18.7 19.3
NOTE:
REV SYM
The normal acceleration capabilities of the AW and EBF are far in excess
of the minimum design value (1.45, see Section 9.0) because engine size
was dictated by engine-out performance requirements. The IBF capability
was lower than the design value due to a late change in aerodynamic
data inputs. This latter design was not recycled for engine size and
flap design.
Figure 3.2-1
Amar z Gno. Do 6-4040o9
PAGE 21
N011
I
I
0a0V0
00
I
III
0I
r
II
I
3

3.3.Z The Effects of Stability Augmentation
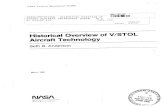
Figure 3.2-2 shows typical variations of these margins (with and without
Stability Augmentationr Systems (SAS) of various *tpes) in response to a step
input of the column. In the basic airplane response, note that the similar
relationship between CLand speed, and CJ and speed (at constant power setting),
allows the available Cb to grow at the same rate as the required CL thus
giving an approximately constant CL margin. With a stability augmentation
system that utilizes engine thrust (to help improve the flight path response'
to column inputs), the thrust changes which occur during a similar'maneuver
vary both the margins and the CL margins, and it can clearly be seen that
control of such variations will necessarily become part of the design process
for stability systems of this type.
In one series of tests designed to evaluate handling qualities for various
SAS configurations, the results shown on Figure 3.2-3 were generated. Here the
pilots were using similar evaluation maneuvers on each of several runs for each
type of augmentation system. These evaluations consisted of "vertical - S"
maneuvers (involving flight path variations about the nominal glide slope of
+2 dots) and speed variations along the nominal glide slope of +10 knots. The
figure shows the range of margin variations during evaluation runs made for
each SAS; the basic airplane SAS off; a SAS involving no feed forward from
the pilot's column to the throttle (denoted by MIN SAS); and a full de-
coupling SAS with complete interconnects. These tests were completed for
the AW and EBF airplanes only. The data show an increased variation in the
lift margin at full power when the "full SAS" is used. Note, however, that
i this augmentation system improved the variation in the flare and gave much
o tighter control of angle of attack during the maneuvers.
REV SYM A -- 7 No. Dt-4OC9 PAGE, 22

Reproduced frombest availab copy
TIME SCALE
-H 10 .SEC -I n3 USH NS I RU;4ENTS I
-~me~ ~. .. ~....Vv 7..,r - r.- I--
COLti N v -4 ."i t
PE.FLCION ' .
%,,::.:: .,1.0,0 .- __,, ... ,.., , .. .. _.-..,-._.. l:!:L ..: i .... : .. .
-i * , .- , -;-: : i
60- 1 (·;·- h
,. i' r * -i' l'::'':' ' '; ' , :."'', . T': ..'. . 1 :40'-~ ·:i i| %t-I': 1 0 ' '.:i ' ,' i ;" ' ;':"' I "t': . . ... i -:i ." , * '-'~ ."
1 .-l.;z..L2 ._.si o I'i.i l..i -- ? i_[...... l ._....i..,_ L., :, :. -- __ . ...DKGE.= " 'ta-- - - f-" -
I ' I"-- ' '---
D....t-I- ,.,i'' ?s'L " _;, i~ im i -,.. ; . ..:i , '...., t Il : II . · - ,L I.
100 - -,
-2 0... , .. ............ . [ ....... L i . ........CL.- 0.6 _ ..- -; ;- ! .:; i ' , ,. ' :: ;: ' '' :" ' '. .- .: . -. · -.. . i; ... i, ,
·0 ·.... ...I..:.!.... .... ....
+,| KNO.S 'PAS,'C }e,>s-zhri; :, ::|jj~ ::i; h i'. * i/& | | |iN
_, ,d7': ..I rt,,.... :i. : I :_
,I LL .; L.:i.;IdL l-|i .. i';iVl lirrimnilli iJ 1 : 11111 4.I .. . .. i i &.... L..... .,,,,,,,,I, -.. .'. i-, ,,,, i . .. i. .
c, , :!;|
o *_i:i[i, Ii :,< :F- Th;: i ;i !; :- Il::: i ; -4:L, :LI , ,:- -l ::::J: ;: I i i 1
, .--. 1 iN ..... , , a ., -+ :--- . ............... ... ..... . ;..I
20 i;t.* "i ...... ; 1' · : -1 ';
-Di1..T -E T NOV. COND. TO7 1
-.... .. -, .- FI
't~~~ri : .'. .... .. . . a"'
'=] i.t.J..! ii:: .;~ :·i; il: ?;:: J.L.1... i. :i ... L:14, :: ,:; :.i( . i ...
,o V. to, COND. 007, 008, 012
CALC REVISED DATE EFFECT OF SAS DES/GN ON D6:4040?CHECK LIFT _M/ARGC/NSAPPD E B F F.3.22
- 727afi-'ig=>FM 23
01 4100 5040 ORIG.3/7 1
I4
I
i
·J 1g-047

L\Io (~4,A%.zI.AT "rAQCRM
Ibp j4; 1.0
M5'' ,0.-s
AW
NO MIN. FULLSAS SAN SAS
I
E IF
No MIN :Ju.SS S As &S;M
0'
FI FT "A4 Ir.3
AT FUL..
CL/~
0
.5
! ~O
A-TT2M~;,WGF& 9it
: :~1 4-1Aeo c~·a~
, ... .
-..... ,:: -: ,. -:: . .. . :~.: : .1.-..:. ......... _:I.: I -·:·- ....
-' · ...'...''- .:....:..
·. ......': ."-..._. :~. ', ........:. --..: . _:
i..._i ''..l:i.-:1. ·~- : ....;.. .. :
· ;'. ' - · · : , ]
..... ! :.;:.i~~~~~~I: '- ; ; : :" ;....... .
.......... ':--;-"7/i- '':'!'77.-'T'" -:":-:" ......................i~~~~~~~~~ .......
. : .: _ .. '. . .I i: ._. ... '........
·~~~~~~~~~~~~~.:'. ''' :.'"
,E,5
:.~~~~~~~~~~~~ .''iii -:- - - -
I
P. . -
~ i::t
·;. . .:~ ... ... ... .:i. : '....~ .....;. ..... ._ -....._ ....... ....i ....... . :.. ".. . -'
AND AW__ .~ . - ......
-1--~ ~~~~~~~~~~~~~~~~.... '._ - .
i ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~. . ,Jii~~~...... ".1..... '. ''- : *'~ '-. "': " '--";';' .. _~.lJ.-:.;' "'' ;'';' .-. L;..:.. .. ~..:,., .. ,i 7.
;_!~..:.=-*~.;" EFFECT OF $1'ABILITy AUGM£NTATIOiVdd40
I~~: '., i
's~~~~i,~ ~ T!I -..... ,.
Li. __.J._i " 1
II
Ii'
!-

There also appears to be a small improvement in the CL/CL margin
variations for the full SAS. The large difference in variation of this ry-r|in
between the ZMF an-n the a Cannes_ wiryn air-'. asuted to t; dierest..ci~uted. to the doiffrr"-t
rates of change of lift with power near the trim point, and the fact that the
EBF design is closer to Ci]jX
to begin with. The figure shows that the
critical maneuver from the margins point of view is the flare. This will be
dealt with more fully in Section 3.2.4.
3.2.3 The Effect of Turbulence
Figure 3.2-4 shows the effect of turbulence on the margin variations for
an EBF airplane (with the minimum SAS involving no feed forward from the
column to the engine). The evaluation wras made in calm air and in simulated
turbulence with R.M.S. gust intensities of 6-1/2 ft/sec and 10 ft/seco Data
are shown for three phases of the approach; a level flight segment approaching
the glide slope; the transition phase from level flight to the 6° glide slope
(including capture of the glide slope);, and the final flare maneuver for
landing. The effect of increased turbulence is obvious, especially during t.he
level flight phase which was longer than the descent phase during these
evaluation runs,
3.2.4 The Effect of Landing Flare and Ground Effects
The measured lift ratios included the ground effects on CI~~X, and this is
the main reason why large increments of CL/CL1AXwere detected in the flare.
The increased values of this lift ratio at C'jiX (Figure 3.2-4) illustrate the
fact that the flare occurs at very close to full thrust. This powered flare
technique was adopted by the pilots in order to give a reasonably flat
attitude at touchdown, as required in commercial operations for passenger
comfort, and also to provide good visual contact with the runway.0
REV SYM NOd.e io D6-40409 PAGE 25
-r

RMs TU41BULENCE: LENVEL "AEC_
o 4>{ to o (0 Ic 0 (44 o
%~~ - -- - - - -
1.0
~Zb~xC/ / ////
.5
NOTE : ENDS OF BOxEs INDiCaTE AXIMUM
AND MI/NIlMUM LIFT RATIO V/ALUES
DURING EVALUMT/ON RUAIN.
:.0
|. 0 '-...... .... ... .........-.. .............- .
j~~~~~~~~j .~~~~~~~~~~. -. ..,' .
I~~~~~~I
TI4tI 0- :FROM
:~
.- FLo -, ,
~~~~~~~~~~~~~~~~~~~~~,-to
LVEL PUC~T TR·o LANDINC3
r··:: :C
EBF A I P- LAK F W'r- MittNim~uX 'SA& NMObF.
C__ ~ ~e~shi I ___ ~F~cv o~ ~U~LEI4C~DS-40409
:5 J.: :" J
· ~ .i.. .- _ _ , ~.. .""'.- : : -·. - ..- -''..: . : ,.i
~' -:-~-' '-":: :..:" ....: ' ' : : ....-';i . .::::':-::" -': )t ':..... !i::- ......~-:-:- .....
:~~~~- - . .... i ..... : .... b' 26..'
!7SM o-----t- ·- . -- ...;:.:-- .. -:. .;....--- ,-
E ~ ~ PH~ ...... N =- FAL
i,. ..-~~~~ ~ ~~:i,-'~1. '' :.~l.._1 ... _...' '..-.l. -..__1 _: _.
,' ' ~%0 ' 1_ ,~- :-:-- ?"-:-- : __ .... ' ' . ....... : .... '
!- . ~~~ L~-UD. ~'~ C~K'T'uE~t 0Iqt'RO L A D!:1 !1 oc~~~~~r L\Fr-r M~~~~~~ec\ Ns*
....... : ... Pt-u,,s~ ~ ~ ~ ~ ~ ~ ~ ~ ~ R ......N2 ' =-° F'.ei- ......... I
?.~~~~~ · -i~ ?~~N ...........:. . : : l_.,.. . .:

A time history of a typical flare maneuver for+he EBF airplane is shown
in Figure 3.2-5. The use of thrust for flare is clear, as also is the large
reduction in CiT in roun-rl effect.
The loss of lift and change in ChintX
in ground effect for the AW and E3F
configurations is shown on Figure 3.2-6. Both suffer a 5-10% loss in CL at
the approach power and trim angle of attack, and about a 25% loss in CL, X at
approach power.
In ground effects at the trim thrust setting for approach the EBF air-
plane has a CoAx only 10, larger than the trim CL for approach, and the AlW
has a C about 20% bigger than CLTRi4.
It was therefore very obviously
necessary to use power to flare the E3F airplane, and indeed both airplanes
were flared by using power for other reasons. The increased power gave a much
larger available maximum lift; about 60% greater than the trim lift coefficient
for the augmentor wing, and about 40o% for the EBF.
To conduct the tests described in 5.4.2.1, to determine the normal accelera
tion capability required for flare control in full ground effect, further
limits were put on the CLax available. The effect of these reduced C'I&X
values on the complete flare while enterirng ground effect from free air was not
checked. However, it is logically expected that airplanes which meet the
total requirements of 5.4.2.1 (both in free air and in ground effect) will be
acceptable.
For reference purposes a summary of the average thrust values used in
the flare is given on Figure 3.2-7. There are three equivalent parameter
values given to the vertical axis; actual % of maximum thrust; the equivalent0
steady state flight path angle that this thrust level would give at the
reference approach speed; and the equivalent sink rate for this steady state
REV SYM DO 40N409PAGE 27

ReP'Oduced IrOmbetavad~able COPY·
TIME SCALE
s-5 SEc -I
-4 _ - .. i'_. .T ......_. .---- il Id.z I I I i 1 ; I :1 I ; ; ! I
] '''_ .' ...... li..J... l · 1:1:1, .:l~f~j;,'
1"
! 1 I. /*s~f:6:~'O~/iO ' :l~l?~[~'-. .... :.:
IIIi}, V :: . I I} 'i r : I I I I · .. I ..........
':, :: : - ! '-'-- ;'' 1'': :: ' , ; · i . ''!: ' :: , · .:" : : :
.,.~ !~. ~~: !..:,''.'.':".,-'::.'':':,.,:,·.
REVISED DATE6-4040
1CHEC t | I Ml /f/ARGIN VARIATIONS f/ 7E DEICFIECK I I 11 1 I FLARE MANiEUVER
FI. 3.2-5pD II I EBF2
_ _ppD I It ll -l ____fs__i__________________ | 28D! 4100 0040 ORIG.3/71
4-/6 COL 2-z
-.lAICH ' 0o
HtEAR
,%,FEET
v.,FT/JEC
'00 -
400-300 -
200 -100-
0-
701
-20 --20-
ii_!. _-:.:.!...' , ..F.. L: :_._.. .!..j ..T
·I ' 1: t ' i -i-: :--! ·l--j: I D- I:I ' i 1 t<
CL
a-6-
4-2-0-
NOV. 17 COND 068
4
I
---4
I ,U
J D5-04

TIME SCALE
9 -;-i I'
I - -- t t-,-, !-t-:'
-. - N-rn ,- I. I.. ::.ir'.'l:,:
DEG/SEC - , -.'- -~ ':' 1--:' t : :" - .............. . 1T2- .. h; :: :6 I 1
... : . ....: .... .l ..
Nzaa t1.2
Tf. I t ! I I j
_1: LI 'b.Jp l l. |11I
- .. ... 1 -.
t
..... . J ...., , , . I
!] !::L l:! ::
'1 .....s .r " rT ' 'i.... I.. i. I
::1 : - :; 1-''l ;.Jm ...._..'....
iI I'' I,''. '
+ |:'T":.'-: .....: 1" .... I" '
k't~~~~~i~ . ... t"-f' -'! r t.i i~
~-[ i ! ...1;" '' · . I i j L..
..........t..... It111 fI 1 i:F:J ' I ' I
I ii. i i. : .I:-r-t · t' " I 1 ' 1
....i I t ...1 .' -- I...
NOV. 17. COND . O08
CAL-C ________ - REVISEO OATE MARGIN VARIATIONS IN THE D6-4040?CHECK _______ =___ __ _ I FLARE MANEUER F3.2-5
__APP _D ___ _ __ -E B F FCON r32UED^~~ppD ~ ~ ~ =I ~~~ (:1II~~ = - -I E~ -B~ J(cONr/NUED)Appo PAGE
-"A______ __A__ -. rf/Yff'/7A ~4,VY 29
J t1-047DI 4100 1040 ORIG.3/71
THRUTJCOMMAND
'N 'ro
100 -80-
60-
40-
2. -
'6-·
C;j 4-3-
t-
I-0-
.. DEGREE S
I
I
I
J
I
,.,..i I-Iii .1
L."I-.
... A
j ' ~~"

" ~~
~~
~~
~:.. .;.
'~~
~~
~~
~~
~1
k .
:.
iA-
_
m(
g) r,
u) ·
.iorr
a~
~~
~~
~~
~~
C
..... :.
; ...
.......... :
.;:..1
-.~.
I/
· .:
...... I
~ .
·;..
· '
' ·
· I
.,
, .
.:
' :
-'6l~i .
.I '
;:"'...V
,
.:
.
a ...,._.
_..._... :":'"
:: :' -!
..... :' '.
i~~
~~
~~
~~
~~
~~
i
i~~
~~
~~
~~
~~
c
~
: ~ ~ ~ ~
~ ~
~ ~
t V
).O
.: ..:.~:....~
: 3~
~~
~_..i~.....
..... .
---------- j
C-,...·
· .
0in
I,t30 O.o
L
LL
L
In10cW
0
0 1 9
-o
CALC
j
REVISED DATE
GF~\J N
7FFE:-E
T
n~w
LJF
-r D
6 -4040)
)9R
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~t
c3.2--~A
PR
-PR
-
I II
~T
HE
BO
EING
C
OM
PAN
Y
30K
JE
A,.A
* C
f 1I5
.D
I 4100
3240
:. .
..
..-I,-
.i
IIII
ILL
JC,.-
x
..... i -
'_ A

From the present study, and from previous work at Ames Research Center and at
Boeing, it appears that the use of power early in the flare aids the pilot in
producing more consistent touchdown sink rates from st,-ep epproach paths. A
thrust increase at 40 to-50 feet altitude causes the approach sink rate to
reduce and the pilot can more easily control the airplane to the around and
perform a more consistently judged flare with the elevator. This so-called
"drift-do,&n" flare appears to take place at about a 30 flight path angle, or
7-8 ft/sec., according to Figure 3.2-7. The beneficial effect on lift margin
during the flare is obvious from Figure 3.2-6 and these data can be used as a
guide for checking flare margins on other proposed STOL designs.
3.2.5 The Effect of Turns and Maneuvers
Margin variations in smooth turning flight were small for operational
bank angles. Figure 3.2-8 shows a condition where the power increase required
to maintain speed in the turn caused the C41AX to increase at about the sane ratc
as the lift required to maintain the turn, and the maneuver was completed at
constant margin. This behavior was typical of both the augmentor wing and
EBF types at small bank angles. To investigate this effect at larger bank
angles, typical flight test maneuvers were simulated including -ind-up turns
and stalls. Figure 3.2-9 shows a wind-up turn to a maximum of 450 bank angle,
with only a slight loss of margin at the high angles. Analysis of a series of
approaches involving positioning maneuvers using steadily increasing bank
angles yielded the data in the upper plot on Figure 3.2-10. With the wings
level the normal acceleration margin from stall was .63 g at trim thrust, and
g;2 g at maximum power. As increasingly larger bank angle maneuvers were
completed, the speed, argle-of-attack, and engine thrust variations cut into
the available margin as shown by the shaded area on the figure. In perfectly
smooth flight in a conventional airplane the loss in margin would follow the
a.D'E~r'/,I NO.D-o404o09
31+PAGE+
F
P
0
p.
;IS
00
CQ
0
n
REV SYM

solid line labeled "no powered lift" and equal the acceleration level used
to maintain the given bank angle. The STOL airplane does considerably better
than this, at least un to the bank angle which requires full. power to maintain
speed in level flight.
The margin available at ~ = 450 is still of the order of .4 g, where the
conventional airplane would be reduced to .2 g. The margin from stall at
maximum power, of course, shors exactly the same loss in the maneuver as the
CTOL airplane would.
The lower plot on Figure 3,2-10 shows similar results calculated for
steady maneuvers on the augmentor wing airplane. Since the trim thrust value
was a higher percentage for this airplane, full power would be reached at a
lower bank angle than for the EBF. Nevertheless, a considerable improvement
in maneuver margin over the conventional airplane is shomm.
If these charts are used to size STOL airplane margins so that they may
maneuver up to 1.5 g.before stall (same as CTOL), then a margin of about .35 g
at the trimmed power level would suffice for STOL. This value would vary,
depending on how close to full thrust the trimmed flight condition turned out
to be.
3.2.6 Margins at Low Power Settings
In general, the transition maneuver from level flight to the 60 glide
slope-(and other maneuvers requiring momentarily low power settings) were
accomplished without excessive reduction in the available lift margin.
However, if rapid thrust reductions are made during maneuvers the gust margins
can be greatly reduced and an inadvertent stalled condition may result.o
Of
0o During the present study an evaluation was made of such maneuvers and
REV SYM e NO. D6-40409PAGE 32

0
Figure 3.2-11 illustrates a particular flight in which there was no lower
limit (or "flight-idle stop") on the engine settings that the pilot could
select. Havinr been briefed to mlake rapid an' precise flight path chanxtges
using thrust, the pilot pulled the throttle back to a verl, low setting pro-
ducing an inadvertent stall condition. Although recovery from the "stall" was
immediate upon thrust increase and the landing was successfully completed,
this can only be attributed to the docile stall characteristics "engineered"
into the simulation. Real life problems, such as asymmetrical wing stall,
buffeting, or loss of lateral control would be unacceptable, ard such in-
advertent events must be guarded against with positive "stops" in the engine
controller. Figure 3.2-12 shows a repeat condition with such a "stop"
simulated. The setting of these in-flight engine limits so that they do not
interfere with required performance capability is dealt with in Section 3.3.
Similar "stalled conditions" can be encountered by engine thrust reductions
during wind-up turn maneuvers as shown in Figure 3.2-13. Again, the ease
of recovery from this condition is due mainly to the simulation of docile
stall characteristics.
A more realistic rapid transition maneuver from level flight to the 6°
glide slope is shomn on Figure 3.2-14. This is an example of a late transition
which required power reduction to the flight idle stop and is included here
as being representative of the worst design condition. At the worst point
in the maneuver the equivalent load factor increment available before stall
was .22 g (CJC ax .82). On the steady glide slope the margin was restored
to .42 g. Consequently, there is a need fobr at least a .2 g maneuver margin
^z. at trim thrust on the glide slope just in order to make a rapid transition
_ without stalling. To provide margin from stall warning will probably require
a furtherl g. The total margin from stall at approach thrust must therefore E
about .30 g.
D6-40409REV SYM a ff -WEiAP NO.
PAGE 33

AUGMENTOZi \MNGLONGlTUUINbL FULL SAS
FLA R E
(%.)
(8o %C%
DESCER I:R 42
(Fr~.,C)O1
;Z~iS:+' -'
I~~oJ~o
6-
30-
Is-
-2
-4
I
40-
40-
20
i-! -i:.-..'-'-
.,.....,
i,: .:.
i;
.. '
AA
A
I ?III.I
-II
.
III
Ar II& I
IIII1I
I
'AAAAI
4n II
AIII
?"' . ! ... I. -F'LI G.T
i..~ ~ ~ I II--. . I II I
:I : I : .·:... . i I -- ·- I_ _ _ _ _ _ _ _ _ I ~~~~~i
"- -- J i U I I I
-- ~PILO'T: I~NtS I
·~ ~ ~~ V~~L
A.
: "[~'A.I
I
IIII~
N i N li N N N U l6 5 i N li l l l l S S N
IIII
· I
FULTON
AAA
" 'ISTO
RVN
INNISMC PHESQON
EMS TteUL~.c.c. - k~ [ec.
':'STILL Al.
10.0
. ':. · .....
AAA
i ; ' . . ; .: I. [
! .......... ....... . .....
__AVA, ~ ~.. . MAXIMUM TNRLIST
* 445 -j Fog. ~iLI\ - i'4-j-i: _:J; ..-. ·.-....., ·i·,..-- :.! .........
D6-4o4oP
(= 3.;2-1
: I 3
I ^_
I
-7
1111
111
11111
11111
·..: .::
A6
It
. 4
0IIIIII

fliii11 - ',::l: !, I
I -t:'-- 4. ::ii l,: ... ,........... . :... ... .1
· it' :, { '''il} i.' j,; '('l.z='.m{4 {{
1-:
: [ .l{ {~ . !. 1 :.: :{·Jz { ',· I , lc'
. : Y...1. 'l ' ll:l'... l' '| '' 1 ... -' ........ .. I.....I. I : { : Y :{
E BF NOV. I6. COND. 041
TIME SCRLE
,, I . . , i . 1 - Ir t- - --,-
I .- 1.; I.'. I . . ,1-. :: :. ...: :
. ·
I II
I -
CLc
OMAXc J
1-1: ~ i- · : -:! ; ·ii: " :t /1:· : --i t l - l:L
2
o-.1-[OJ.:
,%,
I6-40409
|Fi. 3.2-8P AX
J 15-047DI 4100 i5040 ORIG.3/71
1 to SEC ,;
11, 20 -R ¢OM 50
DE6RE£$ 0 - "IDE6REES 0 ...... ,-20 ..- 0 .0
... : '' . :
P v tmrt nmr t ri tury ·rts wa-r urot r r~r -Xntr r
r....r;...l.. .. ... ..
I-t -l -- - 1-':'1:''1,.1 ! 1' 1' ''.'! ' 1 :i:':1': ':I-::1:,1' ,'1!1:1:1 :
I ~i i sl I i Cijr/j' i 1 ":!.... ........... ....' :.... . .... '..I i i: :-T:::-;
-- t-e --i~ t -t- -t -t..--..- F ..-t- -t
t-- i::: i- ;:7 -· -1 !..: 1.: 010- ·:! 01'- :,: i1:;; ::~ 4:,-; q,,i,;
. . . . . . . . . .
F0 -- I '..'.''l';I _ XI A4to ]R to ... .
DEGREES i
'i {PO~ I-
20Ij /° 0 'THRUST
60 i ::
'I FTEC ° :o-:': '0'
,,, ~ ~~ ., ' if5''I
: . , .; :. &! ,
-10
t P I t 1: ,-t- -| t -- _ t .- -- l +, - -:
t.. ....1: 1 :L ,:i . - . :I.,- -- ;-. ,!_~.ji' l. _ l- Zi:_,,1-:i 1''1:,,'.:
,,,.. [ ,, , ·- t-
!,:': i ;'~4;~ ~ -'1 ?i :.,::::.......:t l-.-.rl':~:r>-; -,-i1::. ;!4..~ :,!:,i ti ji --te.; 5_<'ow· ' j'' "':' -........... ..... I' '_ ' isi
,:'':~~ .. ... .... "" ' 1: :: t:,3 ": :-t:: . ...3...: t:F "':--' q -: ~i
0.8-
0.6 -
0.4-
'...",-: '- ..
.2i;, : t.l-7 -*.. `,
MARGIN I/ARIATIONS IX T(URNS
= - 15° ANDO 20
rz.X/rf g l7,4~,4~ C~'~ '~:Qa~/7ZzzSp t

dCOL 64-
·VINCHE3 2-
TIME SCALE
-4 to SEC I-.
"-4 -'_ . :lL.J:-.I:..L :.L:.JLi
100 - ao-t°L j-' -:: '801 V CA Li..80i;
60- vKNOTS ° 1Oi T ! : I -i..:. ~t
40- 40Ic- -i: -i- ':i-- 20-- . -. 20 .- i ,L
2o_1 -~-, O:-?'o : ...... . ..:
CALC REVISED DATE MARGIN VARIATIONS IN A 6-40409CHECK ___ _WIND- UP TURN MANEUVER
APPO = 45* FIG. 3.2-9A f p P P AGE
APP-O.~~s~~a~~~·/~ FN 36Dl 4100 8040 ORIG.3/71 .118-047~~~~~~~~tx-11W
_, .
-j :ii---i!I ; Ii!
.rt'" . ' .,. ... .'''-'r·: ' ' . ,"~'··:' .::1" .... .... '' .'....'. ' tsi: * ' .': i 4'~..... -- ....... i ' * ji' i
! --i'--!'-I' i"-*F': 1: " ' 4'sii-.- ...... .. -'"'t |-i'--i.' 1 1- it I L_iJ.-j.:_L L . IL,.I. : _ .... '1-. ... . . .i
THRUJTCOMMAND
CDECREE.
CJ
E B F IVO. 1S COND. 044
-11 !'-'17':
Dl 4100 5040 ORIG.3/71 J I-04 7

E.,;
MEPAL)Ue_. . r.&QE c.F M.A"PC IN
DQZINC. ita ~ 2~v~Ms~~ sutz=- P.)INSZ"~P
Nc POVJEPL L rT
· .. _o lt~
--~ ~~~~~~, ·-=~'· ---:·- ..-- "~ CON r4i'oN5
I.0 1.2.
o I's
%% 1~i
N
1·-----.~ - --- ..... :...
t~~~~~~~~~~~~l ~ ~ ~ ~ . ....
~~~~4.~.i ._._..'.. . .. ~......~..
j '.
i:' : : ". .;... ... ... _......... : .. :%.._ :. 14.... · ..... ~...'
·~~~~~~~
.... ~~~~~~~~~~~~~~~~~~...' :...:.. .. : .:' -.' .. -.. ..-~.. :
EFTEc.T OF: TUSLNGN - ~\C
o, LIFT 14ARCGNS
L, ~. . ---- ~-,.,-._............~.._. ..... ................
D6-40409
Vc, 3'..-1o
.. 37
.Br
: - -: ··
'.. .i - -1.
1.4~I..sZ 'nS
.3 los:S
-- I
I 1:I-i·- - 'i I-1..
I -1
,11 . i i I I
f.
-i I
i=3
i-- - iL !/L
..I.. . - 7 1 ,- I .rN~~~~~i
0
MARGjc4
1-

CA
LC
R
EV
ISE
D
DA
TE
'S
TA
IL"
CO
ND
(trON
C
AU
SED
B
Y
D6
-40
44
9
:CHECK poII P
OW
ER
R
ED
UC
T(O
N
TO
IDL
EA
PP
O
I F
IG. 3
.2-1
A*p
pO
I
I D
=
,If
z g
w
.-tP
A
GE
[
Al ff"A
9 E
XI'L
lIZ;
, C
, 91I/V
38
I.
0..
!-f?--i~ i:-T-;
·,., '
: '...
, :....1
I : :"'-I
':"L +..
_ 4
ib
-· .
=
'E1
: i·:l^
I- ^,,
..
, ..
i .-
I -:
r .--
:- L.
: .: i
2 :.
..s
t .
.Y
r.- -,--
IFT --h
·ii' ' :):
I*
i _- :
! .....::r.. ...
, .
[,.'._
!
., :
I.._w
:.1~
'1..
I''
l ......
'.-,'-. ...' ,,.,
.:-1;;. i---.-, :' :,:
t/ !'
%;
i..i ;
,i :[ [ i._..; .,..,.
D..;1.
1'i '"'-i---~
!~- --
"'-,.i-I ]------:,
.'it "'- t
, I-..
V_~
, .',
_,
: I -
i .·: -
·. [ l :,
! i...-:.:'tW
"?':.,.! ':i -.;: ?' '~
;...-i;j,L
.. .. ,
..- ..
?,'
t:: 1T---..-~--¢ ~
'~-''~:s
:' : '
::' :-i
'''l:;:'
ti... :
'1-,y._=.i.L r4-
.;--L .,_ ,
?"'----- t
,:-t..,'..
I:.. ;.--:... 7-i; :..h
:.L
.
.- _
i=.':-.~---F..F'' iL:
,- [ .: -, -' [
i._;'.'- Z
.|;:. '
:'"'
;; ":- :
' : "i 'r:'
;'1' :'1' -
~ :.:
-";'
I r----i--.,,'-.'..,I L
i:
i ,: i._j_.,
0,- i-I,.
_
I Ji-
s u
-' -
'b
,ru
L 'i .;=. !. .'- ..i ..i .
t i-'S. ' .''
,-'.i- F-i
·. -,.4
-.. k ..i+
.
7i -
-,_- -
,. i.. .. .. ...; ... i ,:
! ' -i ! z'
1::;': ~-,~ "
'.- ':1-;-t-'f
1.
-.
I:
~. .".-"
":-i .
I... ...:~,.:--
.,'!- i
'.-
I -
--I !
·1
..:....
._:...'?
--,- --
--ii-- .S
,1-- '. .
-,--i-:j1t -: '
-- ' ':
: !-
i·-~:: ......
i r·,
.'. -- i i_"
...i.
, :
.: L-i':i:
1: ' :
'-- -:.' -i:~ ' ','1
i--':.' -:
t;:'.. ;:? :-_j4,::::, ij4:
... L:..-:r :!-.
t .:
., :.=
- .
~' .::-1: -- ..
t+
t- --
t--- .
.._-,..:..%. 1
L- :" :--- -:1 !:-:.: :: .
: :i:: --:;:- ;:~-,...-i:
-: .:
-~ --:---
? :;-eI.':.I:
I .
f ;.
t ''' '
-:'
L
, '-..'1
:
t .'.
--
.o
.. -.
= ::
Qkmtu1wZ
ow
IZ)Xt
Z
4 C
tcm
i' cd
I-Tliz
Di
41
00
5040 O
RIG
.3/7
1J
1--0
47
I I
! I
l Cl
~ '"
x tt
I tb
I t^
,
r 1 ?e
oo
0 t
C:
o o:
°i
0a
*0 c
%to
EB
F
NOV.
10 COND. 015

TIME SCALE
20-
o- JTHROTTLrr
0-0
-20-
80 -
60-
40-20-
O-
40-o 0 -
,VDE*REES 2o0-
10-
O-
II~r
' ' '' 0: -.'' '!·i'-,;
- :' - :-. ...-, .......- ....j. .. . .l..l . : r- t1 : r , , , ilT!1g~~~~~~~~·: .PlSi[te litgt i
EUF NOV. 10, COND. 025
CALC REVISED DATE_CHECK _ =_ _ REVISED D PROTECTION FROM /NADVERTAIT STALL D6-40409
C uNiEC K _________ _____ _____ _ _W IV/T' FlI1H'T IDLE STOPAPPD /..2-2
APP= 0 = ___ _ P AGEPAGE
_ _ _ _ _ _ _ _ _ _, _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _3 9
. FT/SEC
7THRJJTCOMHAND
,v7.
I
I
II
·i-_Mr Xi - - i:- l: !::!:fi ~i -. r Mr : ! !!i I ' i !
1.:- :'':i:-i- l .:i.,:ii- l.
Di 4100 5040 ORIG./a71J 15-047
; - ; :l_;i'5 ;: " -,-7:~-? [ i'"-"' : ri- q7.
.- 'Fi , ; ;-?1-;:":"!|;i :I -:1
.i- .~ i 1. ! ..;.~.. i.5., 5 .. ............... . .. 1.1.1::-,,= :,t-.il Luii...I . ... ....ii. .,:-. i : ...... iI

%.'-~~~~~~~~~~~Ppdre .ro
be t
-IT4_ w wsrr77 ' * 1rr -r;v r; r;1 -t r w ;vtr
D~~~~~,.eG/SC ". .i :s ;] D/'t@ 'Z V- %."4'..t.'C"....-- " '"m ' ., ,...L., .~...%~.-."4-~~~ ~~~~~~~~~ 20 ' 1 . ' ':'.-1 . ...... 'rA .... ~. "? '...... """ ..; ... !:t-m "" ?' "? 3.' '!:-" :1 .... ....-20- -,s .... t...... :..,.;:. Rcob.. ro,T ,..~;~ Af,, ..... l.... ................ '- ] J~~~~ili f l : 1 1'f~~~~li lAp il !~~P~~GR·........... J -~t f · L...... ..... ' .................. ...............................r...'D RE$2-zl ,vDg~/3EC I0- .' i.:.. .ao TL- Di ·CU1N · 1· ·-t-.IIIi- .1.:.....l... ;'~·:-"""'':*''+*'mdu:'~*:* ':::*J':l:" .. ,*,,1-,!;,*'-~
0 . . . ... ~rC~~-(-H-1---(-~'~"~t"-r"�---t* * w -' ' ..... ' i ' --.-- eo--+'-- -- c' . . .-- )-
40 K R 20 "Mir-*:)cl~xil ~L420 jj;~~~~~~~i~- hi:i
DECREES D EC/tEC 10- w E:i! i itirC-; i- 'i liri I -i; IEi j ; j i i;°,' ,~l:· ............... 1·. ... . .....
.. . ': : : it... *. '.. . '.. :~u,~ , ' . '
N*QrF i- r!. ri ¢w ti: c!.i
vl�
-- ~-- _ r- -- . -f- -I -- 1-: LE:- tI. :LL1'- .-:
i...3i--10 t:DE6REES O-t
* ~~~.. .1-10t -I _I ..TF=~
JIm
t---t-
, ! .: . I ; I I :. : .! .
r-- -- -Yvr, unu'; ~uu1'uWi4 X . I :I i _ r ..*·-i- · .ii - I- 'I.
. I - E; I i I ! 1:1, _-, F tL.
c^LC ='REVISED o'TE EFFECT OF POWER REDUCTIONS D6 40409CHECK D URING MANEUVER TO, po = 4 5' F1/. 3.2-13AP=D P AGE*ppg I I II I I Ir~~~~~~~~~~~cE4
.
i
4
J
II
TIME SCALEI 10 SEC t4* BRUSH INSTRUMIFNTS DIVISION, GOULO INC. CLEEVLA
50-RCOM
P.$-0.6-
0a4-
CL
4IXC
D1 4100 5040 ORIG.3/71 J 15--047
.. t--,::~: :-.:' t: '! ,-' 4 :'i; ,: ' s(i,, T ::..:.i... ! .------. ' |: ----.l | -''1 ''A, 201
I. _.__ 0-'
too
THRUST · 80 O- 0---:COMMAMO 6 6 o0- 7 -:i: 'l'::''i:- r
00Oj 70 zo;t---: :;|:~~~~~~~~~* . 20- .It ' '/ '"1-":
ZO . 0 -- TJ;J'-:'F~ .,,,1'::
. , -: ~.... L;-. -.. t ....... i- .:..······"'I' '-ii ..... :1 ..... t--:-
:LL·I. .:-:i ..-' - Ji-}R5 ObmiA~t .:.i.:
_ I.j_.;_l .. I LL._
ir s , ?: " s; . -J 4 >PI _-, .... , ,!J - - ,+ ;u X ' - , L! .;.+ i '
* tL 1t I. ' : _Vi ; i..·--... :T.., ...1. I :id ~i"i~ ~ ',. .iet-r.. .|. .,JJ,,arbsjD.,,> , ,.
} - t -7 --.-.
...- t-: _Lt :j -F--t- :II
L'-, ---I. : Lt t .-
"...--T-1 -h-~ '--i1Lz:E:]£c E
_~~~~~~~~~~~~ . .! . .
#;; -- 1 --- -4- ~ ~~~~~-·i-·r-pt~~tl..2S0,: r f;#$t. At#,C z f~..;.:
I::--.' '?':": ':" ::.: : ii , .,'' ; ... I . .. I -j-:-. ET- , ri; ;3 1_- ,,,, I .... .LI',,, }1
! .;
F- It . . 4-
Ors
1-OJ
... i l;'~ ;-i L-. -!.-....L.I..1...-:.j - . .....i... 1-- :.+I: ::L:.. ::.::::
:.4 -· , .' -, .{.:.. .1' ., , - I T/ '[ t-...-.
't 't.2-' -- , ......... . ........ -: 4 .- ...... :-';'] ; ~ !0,l' Ai!-~.. -i, :!.i:.'
o-$l'.i': :i :-t.:J:'-,:;..:LL.*-t:.t;.;L:L-C_'.:IJ.!:| .l:\E.JI-;,L-LJLi ..l:., -.i .. !:.Odi:; lL4.. i | SlXtCa~F~c!E~vT :i-::NZ F.~~~~~~~~~~~~~~~~~~~~~~~~~~~...~, .i.i_~:
r :' "*7 rn'1- - ~TT ll...... '-:'" ::- 't,! -. ·l !..I
1...!i1. .... ... l,. ,,-.-]~,l-,,:u,, -:: .t*.:-!----,,:..';-'
t:.. t. I ..-; .:.4 , ... l.... .:.~:,,,,:,i/.L ,x ,- .I..F 1 !., l;' !;:'..;':.:,' : J,:,.i.': ~. ; ;;:.~:: c ' I: ' :i-:,|-F`' t 7 il s2Li~mIP|>ir.-ir ji.':'';` - -; I'IB iir~iiMAliiXii'c~ 7.Pl
.:.1.....1.,.
ti:1
t. .::!I J
- 1 -L.' ... .E .'.: t.,
:J·:!i..f-:::Ih i ....
E B F NOV. 16, COND. 044

TIME SCALE1 ,o secI--
IEA4o. ,IO _ I,',NIU- 1N US A
soo IHOE~ 4001
·v-FEET 300-i
200-
too
0-Ioo00 -
THRU3T 80-COMMAND 60-
""/o 40-20-
0
4'C,T 3$,
2-c1 s
0iO-[
6'1" ' t~ * ' 9'7^ , !nSli 4 Ati t r_ n j
.d .. ' '' ,' : "* .' :"! ".'i-f~'F-:~- '- - . ., - .
i- .. , J ,;*. *.;:...... , '!:-" ..-..:.1. ,' . ,, ....... ~--~ -mi' . , . .' ! '. . "
. ,- t,----'--t-- --
-2 I I T- i I !-,',-^ -' - .
NOV. 16, COND. 039
CALC =' REVISED DATE MARGIN YARIATIONS DURING A P6-40409
CHlECKI( _________ _____ ___ RAPID TRANSITION M1ANEVCERAPP o FIG. 3.2-14
==f, F9APP PDO= O:.. PAGE
'""° I I __ I -I I 4101 4100 8040~~T~t ORIG.3/71//7,,~AN .11-4
I
l 4100 5040 ORIC.3/71 JIS-047

3.2.7 Choice of Lift Margins for Maneuvering
In the following discussion the term "margin" is used to relate the
in io, f4t cczff i icn - in the fligt conditio or m-_neuver under study to
the macimum win;-bodv lift' coefficient available at the power setting for which
the margin is specified. This lift ratio is quoted in terms of an effective
normal acceleration narr;in. In actual flight the normal acceleration capability
to stall Would differ from this calculated value due to lift from the tail and
the dynamics of the maneuver.
Summarizing the examples of margin variations discussed in Sections 3.2.1
through 3.2.6, the most critical flight maneuvers appear to be the landing
flare and the transition from level flight to the glide slope, or, a capture
of the IIS beana from a flight condition above the beam and high in speed.
The flare maneuver is considered to be a normal requirement and the specified
margin is that the acceleration requirement of Section 5.4.2.1 is available
without running into stall -arning. Guidance on design rules for this case
are given in Section 3.2.4. The capture of the glide slope, and the setting
of the flight-idle engine stop, are related to the flight path control
requirement of Section 5.4.1.2. This is also a normal maneuver and must be
free of stall warning and retain a level of protection from gusts. Guidelines
for this are discussed in Section 3.2.6.
The selection of generalized margins to CLiAX for the purpose of gross
maneuvers and collision avoidance is still difficult, because this background
material has shomn that the required margins are to some extent a function of
airplane configuration, trim conditions, and handling qualities. Stability
a; augmentation system design must take into account the variations in lift0
margins caused by the control of flap angle and thrust. Figure 3.2-15 shows
an example of how a properly designed SAS can achieve large speed and flighto
REV SYM - o.Y D6-40409PAGE 42

path variations at constant lift margin.
Also, the question of whether margins to Ci.AtX
should be tied to trim
power or be referred to the lift availabuie at maoi.mu'a cower is not co-mpletely
resolved. Figure 3,2-10 shows that margins referred to trim thrust should
take into account the beneficial effect of added power in the turn. Also
relevant to this discussion is the fact that conventional handling qualities
were only achieved in these airplanes by the use of a stability augentation
system (more correctly a command and stability augmentation system) which
linked engine thrust to the column. Thus increased power was available to the
pilot in all maneuvers. The discussion in Section 3.2.5 results in a recuire-
ment for a .35 g margin at the trim thrust, or .50 g margin at full thrust,
to match current airplanes margins.
The margin at trim thrust to cover the transition maneuver was .3 g,
as discussed in Section 3.2.6,- and is therefore not limiting.
3.2.3 Protection from Gusts
For the purpose of comparing STOL gust protection requirements with the
capability of current airplanes, a step gust input will be used. This is
simpler to analyze and the results of simulated flight in turbulence will be
used to modify the discussion to the continuous gust spectrum case.
Figure 3.2-16 relates the step vertical gust level to the equivalent
angle-of-attack increase as a function of approach speed. The shaded area
on the figure in the region of 125-135 knots represents the stalling angles
of attack for a series of commercial jet transports. To match this same
0 gust protection (about 20 knots) the STOL airplane requires a larger margin
between the trim angle-of-attack and the angle-of-attack for CMAX.o0
REV SYM . A (GZA NO* D6-40o109
PAGE 43I~~~~~~-
-

i 'i.,-,, -:I' I~
~I.
.I
[ I ~ I'
i, -L
-·
Ri 'l: ·i f"
?. :''
(": .... _,9 i' r' l
[ ij -+
,, i
.... .
r !
!
1 i , : 'U i '-
Iiiiti
I 7:: ' J.
-, I
0 rt .
..
B
Iii : S-
~J
, r"
' ~
-'z
'r'F'
O'
" t
' *
o
i S
~II
~,,. .,:,i
','si'
i-'i'f : :'-'H --!, i
'-:'t· -i ';~
,iJ
I
I I
I I
o
,
"4 C
0.
-o E
u
m'O
0-u
'0
)0cLe·
-J
NO
V. 17,
CO
ND
. 05'1
A
MA
NE
UV
ER
ING
A
PP
RO
AC
H 4W
ITH
SMA
LL M
AR
GIN
V
A/R
IAT
ION
S
Dl
4t1
00
5040 O
RIG
.3/7
1
.I !I.!.I .j
I. I
i.
i! I
i'i-i..
iI ''I
:.I
!.j.1
i L
I I.I-
.| ',.. L]J
,· .!li| 1
; ! !_.i~
i f i i.i...;.,
I.[.;
' , : ...:·.. I, l. .j
',,':.;":!t i. :..
, ?': ;
IF '-
-: Fi !!i
I j;!,
,,-|:4:.
i: :"1,
ti. '..i..!.--' .i it
:. .-.. .. j .!..h'
t·: i
--.
j ..
.t. ·
',,~ !
., i ~
.t
*. -:.; i!.(i .... il: .
.-
!: [. i., I
' t..~..
; .,... I.[.
i :''-"
:~
r=
;''! .r
· · '
.,
i; .--:.
i~ i.!.i.
1·
__t- -. :'
ti..!..!t.i- : !
I .
'-" .I .. .
i .
L; ! : -:r ri -~':
,T .
;i .,-... ':.'.
il lf il'i
r '
° ' ! :.
.
, [ ·,
i!--,
,i :,.j,, ir
j
I r I
[.)i
iJ
·.. I
I .
-i,:i 1
· .i ,.'' ;:' i"-:'
! ,-
,)
U
J
ioi II
iI
J 15-0
47

~~~...._ :~~P GZ
i
.... ...-: TPG.&
~ . ;t~~~~~~~~tg~~~~~~~~~~~~... .. :..... .. :... .. ....... '
So~~~~~~~~~ . : ..;'.
. , . .~ . ~ : . - ,o
... :...."'-;' '~:"-; .... .......... ' :''''
W· B ~... : Y~~~- .... ... : -:..'....
r~~~~~~~~~~., ·· -_- ·-------- ··--· 1-- -- ·· t--l ·--·- -· i:. '..- ,.....' - J~~~~~~~~~~~~~~~
..I~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~i~~~~~~~~~~~~~~~~. -. .
r ··~~~~~~~~~~~~~~~~~~
~~~~.... . . ...... : .-.........;. - : . ..:..:--~..........._
~~~~~.~.-....... J^. ; ~! .:! .i " .i- 11L~ j:- i''...':j : ~~.:'["::.~. ~ .: ..:. . ., ['.
CALC . Pt<. % I. r-. I RWYISED DATh AOT.TO -CHEC I ~VEFTIAZ D6-4o4o
LAR IqIWI NG
APR APR _______ ___II. LANOI:G F1. 3.Z-H
THE BOEING COMPANY PAG&DI I90 324 AIAN(C tq
I
I
i
.m . .
DO 4100 3240 I.E: A"LANINC 165L

1
If the STOL airolane lift characteristics at stall are different from
conventional airplanes then the requirement for protection may possibly be
chenged. If very small lift losses are sustair.nedl "e- stall then O margins
could possibly be reduced. The real recquirement here is that no dangerous
loss of lift should occur, and as operational experience writh STOL grows
it should be e:xected that airplanes with little or no loss of lift after
ChinX may'well be able to reduce this margin.
In the present study oi variations during maneuvers and flight in
turbulence were continually monitored and compared with the angle-of-attack
at which maximum lift would occur at the power setting in use, D " CL,4X.
This latter variable was affected strongly by the power setting as shown in
Figure 3.2-17. An example of the effect of this was a condition in which a
pilot was asked to maneuver through -50 flight path changes during an approach
by using the throttle. Figure 3.2-13 shows the resulting +70, -1 changes in
M CouLiN due to the thrust changes needed for this maneuver. Variations in
angle-of-attack in simulated turbulence were relatively small, the most
important margin changes again being due to the thrust variations required to
maneuver. Even in the flare, (see Figure 3.2-5), angle-of-attack margins were
not critical. Flare techniques developed by the pilots included the use of
thrust with only 30 to 4" of attitude change, thus minimizing the c< changes
in the flare. Based on these data the margin in angle-of-attack has been set
as equivalent to a 20 knot step gust (150 o/ at 30 knots), in order to "match"
current jet transport capability.
3.2.9 General
It is recognized that the choice of actual operational margins will still0
o depend on actual simulation work on specific airplanes which analyze maneuvers
0 similar to those used in this study. Sufficient work has not yet been done to
~~~~of~ ~ ~ ~ ~ ~ ~ ~~~~
REV SYM NO D6-40409 PAGE 46
r,

decide the extent to which these margins are dependent upon specific conrli"iura-
tibn details. ILowever, the two types of high lift systems studied here ,id
show sir.iilar rargin re.uirements, =.nd the re-t'lts ha-ve bce. uscd to define a
standard for the evaluation of competing concepts.
REV SYM ~AV"lrhaVl Z 'NO. D6-40409
PAGE 47
a,
01
N
0VII.
a
00
UC
oIt
0
+

· . ..... ........ :.
,.. .. . .
I~~~~~~~~~~~~~~~~ ]
............ ............................ i
;~~~~~~~~~~~ ............ .............
..... .. ....... : .. .... : .. : '.. .
i:.......... ; .. ......
i; ................q~ ~~~~~ 4 · ---- - ' .', ., . . .. .i,:,
:.~~~~~~~~~~~~~~~~~~~~~~~~~~~.. . ... ... i.... .. . . .. ... . ;:. . . . ... ... . ; .. . . .. . . .' .. . ......;. .. . ..
i::·i~· · . · :j~ OMEIVTOR WINGr
'; . ........... ... ...... :
~~~~~~~~~~~~~~~~~~;;': j ... . .. .....
!.' . . ...... .. .. .........
i···p~~~~~~~~~~~~~~~~~~~'
.: . . ....... .. . ..... · . .... . .. :
I . ' . ' ' ; ' ; ";' ;:'": ''- ''" ~~~. ....... . ...... ~~~~~~~~~~~~~. ..:.:. .'' : .'.... ,
: . i : -
............40 ~~~~~~~~~~~~~~~~~~~~~~...... ...........
i:: !'i3 i 25 :. ............... ... ..... .
~~~~~~:....!:''....... .. ......................
i:.. i..::.:..:.-e :'" :·~i: i~i iii: i: i: i~i-:i-:.. . ............ . .. :- i :-
I-~~~~~~~~~~~~~~~~~~~~~~~~~~~'
. .... : ........ ....... :... :: ...... : ...... .: ............. :....
I.~~~~~~~~~~~~~~~~~~~~::: ':'i ':i -' :' .: :";.:i i :;.'.::':..:::' ': ' :: .;.i;"l :;:..;.':;':i: ': ' '. . ,;:i
iT:- Fii: i;F:'U!':'!i · : . : i .... i .......
.-:::::::-:.:. O . :~~~~~~~..:0.5. ....! ';: 1 .0.':i. ;;'.$ . ; i' . . . .
.:. .. . . .::::::: i:"::::i.::'.::.' :' :::: : :....:: .....: .: :.. '. :
i ~~~~~~~~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~~: : :::: :i:.i{_: ; : ··:-·:·:::..... . . .. . .... .... ..i-i .: ..... .............. : ........................... .:
........ i t ~ ~ ~ ~ ~ ~ ~ . .......... . .... .... . r ........ ..... ...... ......
:.: ..:: ; : ! ........
:. I:·i::::t ::.'.:': : . '.' :' ... ;: l:.:.-:: l ": ' : i:.J.'':. ::.....: .:'... .... :..... . ....
j , i t i~~~~~~~~~~~~~~~~i~~~~i ':.'...... .' i : 1:: .". ... .
":: . .. : i :':'" ! :::: ....i:'"i!:"::::"i i:'': . : .... .. .. :: .... . : ........:':'..~ i....: .. :.'. '. .. : : : .:. ' . : i.. ....... .. i
15 ............ .... ...~:.. :·ij i ii ::.i~.....i::.
I'~TR.J~ IYE~soN:1~/20/7--~-~;-~n;;-~----------............. .
APR
DI 4' .' o '.., / '.
......... .WIN.. A/ "- ·AX UO-4u I yWITH SLOWING COEFFICIENT
FIG. 3.2-17-- ----------- ·----~~~~-~-3-.~-- .-.. ~_-
THE BOEING C,,.,'yP.A.. 48A,~-^--Z A., Siv
tCWLCX 1cPwlI, I '
-PR I - -41 _________
I i I il

TIME SCAtE
I'CHE L
·'v INCHES
VCAS
,v KNOTS
DEGREES
" DEGREES
-O SEC --'tO C INNLL it, I J S A
6-A·rI·:;·li - · ' .. ..r · F. · .' " ' -I j rl rf -'.
- T ! .' ' 4 ' -,,X ' ." ¢::'. '.: ;: ::I + :.i':: :·, · '2 ; 1' , , ': :' ,' '. , '!' ': UM
4: , ,, '- : : L, , _ -_2_0 ,l-t 1: i ,:: i i. .
i -!-- -- t"T" --t- -!-" , t'- - r"T -i--i---i----,- - !-.- :-
1' '" i .. ......:'";";;"..;: ,';'"-:....... .. ..... ..
:,.- :.: . .:''- - ;-- ...... :.:.::..:SPE| -i----i-
0 . I.. ,=:i", · - - -i:. ..'--- : P · | " - ' ' ; T H - * - .: ,i . :' G .' ' : i '
'- Ii
20---- _ _- j---t t - " I"Hi - OM .AND; : ; ; -.-'; -...-- j ... -:
- -- :, -.- - . ---?' ---- ---- .. I - '- ' ,. ! i i . -- -*-- -----i- ---'--
!o =Xj i·i. i,$,.: .,,,: :,,,:!:,m:;!'l- T' "';, ., "J".
-2 0--- . ......... . ...--. , _.i.. ..! :.:.. i ., ... ........::1::: 1: 1 : i : i : - : L ' 1a, ;i ' ·.. _----..-- J. '
...... -- 't.. -1 1 n i --- n~lr-T--' ---* ..... t-------f---...
- - ! i--!: -1, j I--t. 1--l:- -I, t- I -! -i r- i r-' --
r' ,-'[--'-t' [---T'"-i" r ~ .... -- ....... ' " '' t.; o . U,: .. , .!.'
lO &',,,., _.,.... j .- Tj. - .... " .... .... : .: i. ' l.l* .:.I _*.- · ..
-...L__L..J..._L...~ _ .J ..... ... - ,]'J; BLOW/IN £OEFF/CIENT. i ~. -_.,o--T-T- , ,-- - :--' -:]F--J- . :-- : I=- I:-- : , :-:---- - -. -: --F
_01-,..,--, . .---,.'. :-. --30 -.:'.,'-. .I '! :!i ?*......:i "; .: .... .. .. ! '
20-,-.,; ;:' ;i':f-? r -. rf ;:; :r ;r: -:: r r-f-:;rtr m !}*-Ft F r }- ,: :- ~ :-.d.i;. ri: i -a- , ,.;.:4.-~: _ . .r l_.8*l.to ' ' , A ; ' ;i i. l:i :! '
"--t-i- - -'- i- [- -c v! ! .; .; .. ' .i-.... 1 '
""-- : '-r- |-|:::I: i*:""' ' :: 1' ;.: !. ' : *.'t i,:_ij ..1.... ._ ff.f. 1. i ...,i.._i _LLI..
', ', : I' -,.-;.:.'*:-, !i _ .: J: ::Il~.. . .. .. ... ;.
..- i II -:i-:-! -i-- .: --1
NOV. 17, COND. 040
CALC REVISEDI DATE VARIATIONS IN ANGLE OF ATTACI( P6-40409CHECK _ _ _ J MARGINS IN MANEUVERING FLICHTAPrP 0 _ __ _ 1 J FIC.3.2 -18
APPD j j PAGE__,_______ __'_ '___,_._,_____, -49
01 4100 8040 ORIG.3171 J 15-04 7
THRUSTC OMMA ND
COv 0A D
80-
60-
40-20-
0-
4-Cu s-
2-I-
0-
I
I 7
01 4100 1040 ORIG.3/7 1J 1--047

3.3 Flight Path MLarcins
Criteria:
1. cThe - ' f1i0ht pah cortrol syJS.tcm must be capable of achievir.n
a. a descent angle of 20 steeper than the nominal glide slope
angle at a speed 10 knots above the reference approach speed.
b. a descent angle of 2° less than the nominal glide slope angle
at a speed of 10 knots below the reference approach speed and
in the design headwind.
c. an incremental flight path angle above the nominal of
rva = 20 x ) r. - FOR - -t 6 - d e
g
r e e s
\ V AUIFORm~"V - knotsAPPROACH
2. The maxinum climb rate available at full power at the reference
approach speed with one engine failed must be at least 250 ft/min
in a 3°/sec steady turn maneuver. A configuration change is
allowable to meet this requirement as long as it is easily made
with the same motion that is required to increase thrust, and pro-
vided no noticeable loss of lift or appreciable change in control
forces results.
3. The maximum rate of sink below 1000 feet altitude shall be less
than 1000 ft/min.
Discussion:
1. The control requirements for the primary flight path control
system are discussed in detail in Section 5.4.1.2 and were justified
by particular tests conducted in the present study. It is worth
noting that the first requirement listed effectively picks the
value of the flight-idle "stop" referred to in Section 3.2.6.
2. The maximum climb rate requirement evolved from the engine-out
da, [l r BY<: No. D6-40409
PAGE 50
V
o
c
0
0I,0
0
0r
0
REV SYM

controllability and go-around tests that wrere conducted on the FWF
airplane. Due to the large rolling moments generated by engine
failure for this tyve. of e.irp)ne, the design enrgine-out rolling4
moment is a direct function of tile man-imm installed T/lI. Thus a
series of tests were conducted to determine the minimum engine-out
climb gradient (and hence the minimum T/W) felt to be acceptable to
the pilot. These tests included clearing turns duringr the go-around
climlb-out, for which a turn rate of 3'/sec was considered to be
adequate. In this clearing turn it was found that the variations in
climb rate due to pilot technique and airplane dynamics resulted in
portions of the turn occurring with the airplane descending rather
than climbing unless the average climb rate capability in the turn
was greater than 250 ft/min. It was therefore considered that this
was a minimum value of acceptable one-engine climb rate.
3. Many times during evaluations of flight path control requirements
pilots commented on the excessive rates of descent needed to capture
the glide slope from an initial condition above the reference speed
and above the IIS beam. The nominal glide slope for these tests was
at -6° and the reference approach speed was 80 knots. Nominal rate
of descent was therefore 850 ft/min. This increases to 955 ft/min
at 10 knots above reference, and 1275 ft/min at increased speed and on
a 2- steeper glide path. There are many documented tests suggesting
a limiting value on acceptable rate of descent near the ground,
the most often quoted value being 1000 ft/min. The present tests
amplified the need for such a limitation and discussions with the
o evaluating pilots brought forward the following guidelines for
limitations for manual flight:
o a. The nominal stabilized glide slope should represent a rate of
REV SYM ·'' J F CNO. D6-40409PAGE 51

descent of between 600 and 1000 ft/min.
b. Below 1000 feet, the ma;ximum rate of descent needed in
mnreir-ering shoload be less n On 1000 ft/in if at all
possible.
c. Above 1000 feet, rates of descent as high as 1500-2000 ft/min
are accertable.
d. The airplane should be stabilized on the final descent slope
before reaching 40 0' altitude or at least 45 seconds from
touchdown.
e. In the descent, the body attitude should be writhin two degrees
of the touchdown attitude and power levels must be set high
enough to give good engine acceleration characteristics.
Since some of these ideas are not fully tested against the STOL
approach requirements, the criteria chosen was the simple restriction
on maximum sink rate.
REV SYM ffAJ'V, NO. Do-4o1ogPA^. 52
F- '-
af
I,_
Eo
0E Y O>K |OD_00 )
0~~~~~~~~~~~~~~~~~~~~~~ AE 5

3.4 Sneed Marins
Criteria: The choice of reference speed and approach configuration shall
provi'de a ,unrgen eof 15 in sp-eed frcm tre c eon--trated V._,r at t':e aroz.ch
nower setting.
VEIN is defined as the lowest obtainable speed in 1 g flight that does
not suffer uncorntrollable roll, yaw or pitch motions, intolerable buffet, or
exceed the maxinrum allowable angle-of-attack.
Discussioh: This recuirement is comparable to the familiar speed margin
of conventional jet airplanes, and is taken from references 5 & 6 since no
specific tests to determine the necessity of this margin were completed
in the present study. It is not expected to be more limiting than the normal
acceleration requirement at approach power of Section 3.2 wlhich provides a
lift margin for the critical maneuver cases.
It is worth noting that the requirements on minimum control speed, VMICA,
in Section 7.1.6 can also set a speed margin requirement for the approach
reference speed if the airplane is rudder power or lateral control power
limited.
Other speed margins suggested by various investigators have been keyed
to minimum speeds defined by the capability to maintain the reference flight
path angle at full power. The purpose of such a margin would appear to be to
ensure the capability to return to the original glide slope after a disturbance
due to gusts or wind shear or some inadvertent speed change. The flight path
margins of Section 3.3. cover this since the requirement for NY 20- V was4V
I determined to cover just this very case. The speed margin from = 0 at
0o full thrust for the airplanes used in this study was between 25 and 30 knots
g all engines operating, and less than 5 knots with one engine failed.
REV SYM AdY ' Lm"' No. D6-40409 IPAGE 53

No requirement has been generated for a speed margin from the
poiwer-off VlmI. Other discussions in this chapter have expressed the need
for a flight-idle stop i htie eiolfies oc nwrer-lift -ehices with the eixpress
intent of avoiding inadvertent buffet or stall due to idle power selection by
the pilot. The trinrscd flight path angle at 60 knots and 25; pnower is about
100 - 110 giving a descent rate of 1500 ft/min, well above the usable values
quoted in Section 3.3. Once the flight-idle stop is installed, of course,
the question still arises in the form "should there be a speed margin from
the VijlLT at flight-idle porer'". No requirement has been found for such a
margin in this study, but the question deserves more study. A flight-idle
stop set to the flight path control requirements of Sections 5.4.1.2 and
3.3 proved to be satisfactory in the present study for all the transition
maneuvers accomplished, even in gusts up to r.m.s. levels of 6.5 ft/sec.
Calculation of the speed margin available for the AWZ and EBF airplanes at
this stop setting shows it to be of the order of 5 to 10 knots.
0
o
REV SYM BI'''J' J o. D6-40409PAGE 54
- r

3.5 Touchdown Dispersions
No criteria were determined in this area.
. . . n!iesion: --
A statistical analysis of touchdown point and sink rate at touchdown has
been made for the followring configurations:
Aircraft SAS Configuration Piloting Technicue
AW Full SAS, poor n, response Flare with column(ZCnz = 2.0 Sec.)
AW . Full SAS, improved nz response Flare with column(Tnz = 0.6 sec.)
AW Minimum SAS Flare with throttle
E8F Minimum SAS Flare with throttle
Horizontal error and sink rate error with respect to the glide slope at an
altitude of 50 feet were also analyzed for the first two AW configurations.
The target sink rate at touchdown was 6 ft/sec. The target touchdown point
was 600 ft. from the threshold on a simulated 2250 ft. runway.
Two experimental test pilots flew the runs analyzed over a period of several
days. The pilots were not initially familiar with the configurations flown.
Therefore, the pilots' learning curves influence these results and statistical
methods must be used for evaluation. Most of the runs were primarily intended
to evaluate aircraft handling qualities in the landing approach and flare.
Precision landings were considered to be of secondary importance. Vertical "S"
maneuvers or speed changes during the approach were used in the majority of
runs. A few runs in cross winds and turbulence are included. Most of the runs
; were performed in still air with unlimited visibility. No engine failures are
included. The pilots did perform go-arounds if it appeared that a reasonable0
touchdown could not be made.
REV SYM ' NO D&.4010C9
PAGE 55

The maneuvers during the approach were larger and of a different type than
a pilot would normally use. iowaever, they are similar to tasks such as cap)uri..;
thc glidc sllo-c or flyin. i: a gusty e..r.:nc:.nt. These e-taluaticn ,neuvers
weye terminated before the flare. All of the landings were visual although
several runs simulated breaking out of an overcast at various altitudes. Alti-
tude and raw ILS data were available in the simulator cockpit. It is possible
that Performance could be improved by the use of more elaborate landing aids.
For the reasons stated, it is felt that the data are not adequate to
determine design field lengths for the aircraft configurations studied. The
data are valuable for the following uses:
o They give a qualitative evaluation of the performance of the various
configurations in the flare and touchdown.
o They will serve as a basis to design experiments to determine field
lengths rationally.
o They suggest relationships between easily measured flight path
parameters and touchdown dispersions which can be used to define
approach and landing aids and to set flight path boundaries for
satisfactory landings.
3.5.1 Statistical Analysis
Some simple statistical analyses have been caried out on the available data
in order to determine the effects of the various configurations on landing per-
formance. The mean values and the standard deviations of touchdown distance,
sink rate at touchdown and the aircraft relationship to the glide path at 50 ft.
are shoim in Table 3.5-1.
The standard deviation is a measure of the amount of scatter of the data
u about the mean. Statistical tests can be used to determine if the difference0
between two means or standard deviations are significant in a statistical sense.
O . .
I-
4C; REV SYM NO Dot 6 9PAGE 56

0
With a large number of available data points, the mean value of the touchdown
point and the distribution of the touchdown distances about the mean could be
precinsely dcte:,ined. As the number of data points is reduced the effect of a
-single point becomes more important in determining the mean and the standard
deviation of the set.
With the knowledge of the number of data points in a set of data, an
estimate of the accuracy with which the mean and the standard deviation is knomwn
can be made. It can then be determined if there is sufficient data to give
statistically significant differences between calculated mean values and standard
deviations.
Tests of significance have been made for the following combinations and the
results are shown in Table 3.5-2.
o AW aircraft, full SAS, effect of load factor response
o AW aircraft, full SAS and simple SAS, effect of piloting technique
o Simple SAS, AW and EBF aircraft, effect of airtlane configuration.
The statistically significant results are further analyzed in the sub-
sequent sections of this chapter.
Touchdown distances and sinlk rates at touchdown for the configurations
tested are shown in Figure 3.5-1. Data from Reference 13 for the C-141 aircraft
with an all-weather landing system are shown for comparison. The C-141 data
were obtained for a conventional glide slope approach.
0
REV SYM " o. D6-404o9PA^ G E 57

J U
tlN
\0a r(
-N
NCu
.\
CI
k0 0OH
. .I
O
t--
,-i aco
\DCY
U-'
U'
tC-I
aO
tf%_\IV
) I~~~~~~
0 .tu
O;
,.,H
4,]0C)-
o
s
I-
, .
o;,
h -
a a)
0 N
rC)
UO -C)3
Cxi 0
(0
e *
4
4-) k
4 JVZC cd
0
_
Ck
n
AL ACA
.No.D6 -40
409
P^AG
E 58
NI-1
J II
OIe ci
'ICOU -IC
Oc
Ccdt4
-'1.r -3
;
e ~4
.H.
¢
Co
NIItNN
4-,
$-40hUNH¢ZEh 4-445.4C-)Q$4
'H .Zk4
-O C
0
N
OJIINV
.
i:j
.S.) 5.1
.1.
d
r4h
c3-1:<
P-
¢,'H
V.-1
k PI
Iw6A,CHi
H E-4
HHto
OCo
'.O
,-4
LrIH%
Cy;eN
cO
C)Cfi
.d O,40',-i
r4.3-4
aC
H
rF-
a goI'I'
4)4O
,=
III
7iiII IIIIiII
-1INII
I
¢dE4
iLi
r4
IIcJI.)
II
II!
,0.
y,O
t
o .
i
REV
SYM

',s
0 0
04'as
0 .p
0
..4 co
%
0 .
4rC
l
043
0
4
_^>
ff=Z
AO
~N
o.D- 4040o9
PAGC
E 59
OHP4HP4
0Cr)
c)
sO:r--<
<
£,-
Zr- l,-j
t
0
rt4
Ijl
5e ~.
.
x0
¢goW
-Jtp
rPI
F.
aI
00Vf.P.
CaV
CtAI
hHpn
Cl)
P
REV SYM
9C)
-I4'
CO
2 d
o 0
o o
h h
4 4
C4
E-
P4
o0 r-4'
co
o
'e0
I I-),
1
i-II .L
PI-901'IIp
--- IIi
.S ' ' ;
o~X
o X
oX~
o
I
oX \I
1
'.*4
:I

: ._:.: ~ ....... ...... :.... :. -o
~~~~~~~~~~~~~~~~~~~~~...... '
. .. .::..... .......i : !:~ I,
" ':';'~ ':' ' : ':" ~" ' :': .~::.i'~~~~ ~~~~~~~.....:::i.. . . ...... :..... '.. :.. .. '. ...!.-'.!':i.!..~~~~~~~~. :. :..:...:.;.i.. .....:..' ....
! .. .. . ! .... : ....... . ..... :.....:..:
?i"':....~ ....- ......" ' IIl q I.. II 'I..
------- ..:....:. ...... I .
;:':::_ I~~~~~ij' .. ' : :1:~:~-' . - i : : ' .- : I . I' .i...::~~~~~~:-. ;:::-:
T~~~~~~~~
:: ...... :.:..:. - :. N. .' ..
:~~~~~~~~~~~ ..o .... . . . -- LS S qc7 c
:::::::::::::::::::::::::::::::: :: :::: :: : ...... :. : ... .
~~~~~~~~~~~~: ·~~::::::::::::: : . ~ `:" ::::::::::::::::::::::::::: r::.::::::::' l 9i-' -:':'· :'- .:'·, ......_.
:::::~~~~~~~~ ~~~~~~~::::::::::::::::::::::::: ::: :I:: : ! I ·: I:- '- v~- / ~o ~
C~~~r~~* I
APPp _! i } _L' ; {
·- , .
:7: ':'::: :'.
'i
'. t
, : ;. ; . ~. ,~~ . ;
"': 7t ... . .
I .-- · · · ·i
ci24A;
,5z300Tlia
·· i Sb5 3S VS q7ckVI
- '..:.." .......... ... 1...II:::::::::::::::::::::::::::: :::::::::::::::::: .~P .. VI:: :::::::::: i:l::::::::: ::::::::::: :: : ,: : ! :: 1 1 : I"":'" i ' :..... ... ............. ::" . . . . : " : '
7 7- .... .... .... ~ ~r Mb
'
M: I 1 3~ 02;~I I:.. j-·: ::-:··l~r:: ···: :
I'a\MS ~~~~~~~~:)--S
bc ~~~~ ~~~~~SF$ '77/7_./ m/v/
i. .. . ....
!" '- - - -- - 7 7
!:"::":'::: ~~~~~~ .....F:':' . .... :::::.::.::::.:::.: : : : : : ' :~
~~~~~~~~~~~~~~~~~~~~~~~'': '":"8
. ..... .... ....:..~.?-.:· ·............ .....
IC;LC
lr' ; I
r; .;I'll let.. 1I111. , I .. , ..1 .
I~~~~~~~ .:
S~ ·
......~~~~~ '~' -' I .1CI3 (7(:1-3o 01'~~1~~~~~~~~~~ '7 c~~~rllC3H-Q
IAe-{7L_/ _ :::;: ) I ATr; D/S1,fx,',r$,10 0~ 7"< C/rU/DOM/ND1.7'A,4/CS 4NO SIV.,T~' ,qT'-Oz/c/./DO~I//V
l,-404:9
,"G j./ 3.-1
60THF- IC [:
0
3.5.2 Effect of Load Factor Response on Touchdown Characteristics
The MJW aircraft configuration with full SAS was used to evaluate the
effects of verying load factor response. Ccnventional a ilotinr techniques,
(flare writh column) were used. SAS gains were varied to obtain equivalent
time constants for the load factor response,C nz, of 2 sec. and 0.6 sec.
These equivalent time constants w-ere measured from responses to a colunt pulse,
see Section 5.4.1. Data are presented in Figures 3.571 and 3.5-2, and Table
3.5-1 to show the effects of load factor response characteristics.
The data show a significant reduction in the touchdown dispersion (as
measured by the standard deviation) and the mean sinkr rate at touchdo-m for
the more responsive ( Z nz = 0.6 sec.) aircraft. The differences between
the mean touchdomn distances and the sink rate dispersions for the two con-
figurations were not statistically significant.
There is no significant linear correlation between the touchdown distance,
XTD, and the sink rate at touchdonm, R , for either configuration. None of
the sink rates at touchdown exceeded the assumed gear limits of -14 ft/sec.
The mean sink rates of -6.7 and -4.9 ft/sec., forrnz = 2 and 0.6 sec.,
respectively, were satisfactory. Also the mean touchdown distances of 680 ft.
and 695 ft. are not statistically different although the dispersions about the
mean for the less responsive aircraft are significantly greater. This suggests
that the fine scale controllability of both aircraft was sufficient, but the
long term control of flight path and precision control of the flare was more
difficult with the tnz = 2 sec. configuration. This configuration was more
sensitive to flare initiation height and the initial conditions when the flare
was begun. This suggests that this configuration would also be more affected
by gusts and turbulence.
t The responsive (tnz = 0.6 sec.) system gave the pilot sufficient control
during approach and flare to touch down well past the threshold, yet choose the
REV SYM T 7EIAG NO. D6-40409PAGE 61

point consistently enougl to stop the aircraft within the required distancec.
With the storpping characteristics used in the simulation, the aircraft could
stop in about 11ll feeL from the touehdo-wn poinrt.
Ba'E/ =C NO. Do-40WO9Ar".Lex" PA GE 62-
el01
a
aoo0
0
9ooI-
-0
REV SYM
'Ir
62 I%
IPAGE

ta. qZ0 4.
it tt ' :\ Ia I-..zc t if I \ 'L %k, CA ;
m41, %
A
a C4
\CAolzl a
_- k k
o -o
t Q
I,
....... ; , ...... ...
*.~~I I ":i
6O
I ho
o
cz'3
"'3
Lu
s_, 'U
I t
44
e
I
0
NN
I.
- .. 'lN/Otd nMOaHnOaI o1 a70Hs3YH1 kVOYJ 3NAVISla 'IlX
TOUCHDOWNV
....... .. . ..
.___T COMPARIDSOW1:*- ----- ·--1------ ---. =T CHDOWN
~~~~~~~~~~~~7'u¢ __1___. !
DISPERSIOWIT/I SI/NhTn2 0.6 v
D6-40409<A TE ArZ.,0SEC , F3.5-2
, Fl~$$.a·
, ; , ; 7 ; ''I .. . .I
-I .- _ : i - -
LuI-s;oc
'3v'Ii.-5U
-I
-h
0..
Li'Us
go
4s
14k·
i;
I,
.-- I,)o
Ct k
c.l
4,
vz
40
-J
's
.. o~ Zt
~. S
)_
3 4'
Itr
if
*::
.- _
ft ::3
%3'U
...... ..... ,V
* ~o h4t
I. . -* 1,_ Ulf
la *
os r \
t4. I.. U 'QE P
·. , I I_
j2
(61 :; t 0 ~ ~ O
o _ / o
O ~ Li- t ?0-
%.
o'0. ,
. .. .- .. ; . -. . . ..
63
Ii
'-.
I .
. - ._........,r
. . :: .;..'....
. . ... . -... .
!

3.5.3 Effect of Piloting Technique on Touchdomn Characteristics
The AW aircraft was also tested with a less complex longitudinal SAS.
This "''ri..az`" At -ld 'not se an auxi]liary 1lar cojntrol to aid in decoUping
thrust and lift and required a different piloting technique. The pilot
controlled speed by changing aircraft attitude with column. He controlled
rate of sink with the throttles, This technique is significantly different
from that used in large jet aircraft and required several runs for the pilots
to feel sure of themselves. The SAS was used to damp the pitch response
and to quicken the engine characteristics to give good load factor response
to throttle commands.
Accurate and repeatable flares were difficult using this unconventional
technique as demonstrated by the higher sink rates at touchdown shown in
Figures 3.5-1 and 3.5-3. Because of the learning process involved it is
difficult to say if the larger dispersions in touchdown distances compared
to the more responsive, conventional aircraft, are meaningful. It does appear
that the pilot tended to touchdown harder with a larger dispersion with the
simple SAS using the unconventional technique than he did with the conventional
technique using the more responsive SAS.
With further training and improved flight path information in the
cockpit it would be possible to improve landing performance and to produce
good, consistent landings using this techniques.
3.5.4 Comparison of EBF & AW Configurations
Figure 3.5-3 als.o compares the AW and EBF configurations both flown
a with the minimum SAS mode. Both configurations had essentially the same
mean sink rates at touchdown and the same dispersion about the mean. The
lower touchdown distance dispersions obtained with the EBF aircraft may be
REV SYM V NO' ',So. D6-C4009 PAGE 64
-II~~~~~~~~~~~~~

due to pilot experience. By the time the pilots flew the EBF configuration
they had gained experience flying the AW in the unconventional mode for two
days.
3.5.5 Compariscn of Touchdown Dispersions With Fliht Path Parameters at
50 Feet
Figures 3.5-41 through 3.5-7 compare the distance of the touchdown
point from the aim point ( XTD, ft.) with sink rate error (I50," ft/sec)
and horizontal flight path error ( X50, ft.) measured with respect to the
glide path when the aircraft passed through 50 feet altitude.
The computer used in the simulation stored various flight path parameters
when the aircraft passed through 50 feet altitude during the approach.
These parameters were recorded and used to calculate the relation of the
aircraft bo the glide path at this point. The flare was generally initiated
below 50 feet altitude for the more responsive aircraft and at about 50 feet
for the aircraft with n = 2.0 sec. Analysis (see Table 3.5-2) shows that
the differences in the dispersions of AX50 , and & 0,' (see Figures 3.5-4
through -7 for definitions of these terms) for nz = 2.0 sec and Vn z = 0.6 sec.
is not significant. This implies that the pilots could position the aircraft
relative to the glide path prior to the flare equally well for either con-
figuration. The significant difference between the mean values of X50,
and A 0', for the two configurations indicates that the pilots learned that
these initial conditions helped compensate for shortcomings in the flare
capability of the aircraft. Figure 3.5-4 shows that the pilots tended to be
right on the glide path at 50 feet when flying the more responsive aircraft.
With the less responsive aircraft they tended to be below the glide path as
shown in Figure 3.5-5.R.
REV SYM 8oEie~r= |"o. -D640409IPAGE 65
-r
0--

The large difference in touchdown dispersions for the two configurations
is significant. It indicates that although the pilots could set up initial
conditions to their iiking,the aircrait with the sluggish n response stillZ
had large touchdown dispersions. Further investigation of Figures 3.5-4 and
3.5-5 shows that the pilot could cut the touchdown dispersions somewhat if
he kept the aircraft within +2 dots using the raw ILS data with the On = 0.6 secz
configuration. It does not appear that the touchdown dispersions of the
sluggish configuration would be much improved if this criterion were met.
Statistical analysis indicates that there is significant linear
correlation between X50, and A TD for the n = 0.6 sec. configuration501 TD n
z
(99.6% confidence level). The linear correlation between X50, and XTD
is less (95.5% confidence level) for the = 2. sec. aircraft. Itnz
appears that about 17% of the touchdown distance error may be attributed to
the horizontal glide slope error in both cases.
There does not appear to be any correlation between sink rate error at
50 feet and touchdown distance, as shown in Figures 3.5-6 and 3.5-7. This
implies that as long as the aircraft has sufficient flare capability the
sink rate at the beginning of the flare is unimportant. However, the aircraft
location at the beginning of the flare still affects the touchdown point.
Better landing aids would enable the pilot to position the aircraft more
precisely and improve touchdown dispersions.
a4
PI
IPAGE 66

i· -. ·%. .\
'oO. i
·o .. ....--~
7- .. ....... j...`- P - ------ ·I-' ... ... .. : .... 8 ' ' ',. ......... .
i·----- ·-····-- -- ·· -··· :· - ·r :... ...... . . .... . . ... .. ... ... .. ... O
~~~~~~~~~~~~~~~~~~~~~:. 0··!
7 :' ! :7:': ~......:..-- .......:--.:.-.'O 'O O
'' . ~. : :~ ·· : · I : : : : . ...... .. . ..... .::""':':: ....::: ....... ..... ..
r'-7'-'::'"--'7:"'":-7:':': ......:7 ":' :'"t ......:':':;:"':':;":"'":'""t'y"":-.... -:.7. : ......'- O:'....... ....i .... I..,....:"':...,. . . . . . . . 1:..... ;";......';:';'":.. . . . . . : ::.'.
..: : ........ X-........... ........ . .. .. : ....... :- :..; ...........::. .:.- .....::~~~~~~~~~~~~~~~~~~~~~. . .:' .... i.':i''!:!:!'ii:!:" ':i::':;: . : ;:'i':.i' .... :.' ...........
....· .......:-: :' ::: .:: ::!-i: ':~i;~i.: ;'F!i : ji " ::;; ' :'·" ::'VL';;E7-' · :!'..~ ~ .~'.' .;::i:'-: :7; ':·;;T: :;F ;' :';"·;·"i F: :::·::; ' : :;": :,'.............. i- ·- ·· ·-- · ··· -······ ···---- ---- ·······.. ......... ........ ..... .
"..!. · I i '..-' :. :-:·' '" .::. .. ;:..... . . i .·.: . : ;.: :::. :::.. :: .!: '· ! . :.:. ::. :.:.:......... ....... ~:.....:..: ..-~ ·
.,",?,,~,,~? ::~: .. :',- --:',' '! ;i" '?::...'.' :
~': ~~'. ......... , .... ~: : ~ .":' ....
. . .. ..... .: ..-.... .
......... ..... . ... ... ;...:. .. :.: - .. :I. .·
-.~: _[ ·:- ' .... ;.;-:-;-: -'-,:i ' ' '"' ' :~...'~ '"-:..'o. ' .... :. .... :. .. l.... .: ... ;...:.:.:.. .':..:... :.::.iL:.:~.:-./.l:~.:i. ... :...'...I. ;.-....:. :.::..... ..
:;-.:'·i ·· - - .""
"~~~~~~~~.7. i. ::. .: . ...,1 i: j I : : :~ ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ ' -;i-: k
...:...-..::::. .- - . :-L: .... ,... :. ......
a . o..... ..... ;.. 0 .....
--t~~~~~ii~~~~ii ;·- i .. i.. ............ .. .... .: : · i : : : : : .. ~ ~ ~ ~ ...... .....
.. ... ..... .....
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~. ............ .. ..... ..
.~":~" '""'':-'i INI'1loa NnI tf:)nO-L O-L 70HS3ZH t W020~ 3tZ)NVLSKa OLX. i.....: . :-..: .3.NC v~xH/./.. .L 7fS'/.Z.V/O.4S3~L[ o-
,pu ii.'..'. .......... ....CALC M Tu,4'a -L OATJ.;..:1;3 t~T MUCCHDOW~N DISP6RSIONJCHECK C"~94RISMI 4,V-TH SINIk 9A'rr / A r 40 4 O
TOUCHrDOWN Ei3A ii 44/0. WING A /CAPR MINIMUM SAS FIC23 49-15
'~ l:,...,.(o C.'y,...T-',Pt ',' { 67
' '~ J -!- 'I ; .....
....·: ! " i ::: i "::!' ~ : '~': ···/ -,.
... .....'' ' 'III~ ~~ ~~~~~~~~~~~~~~~~~~~~~ I --
~~~I I ' '[ ' . 'I ..
i ~ ~ ~ ~ 'I : ''[ ': : I 'I ' ' ' ..:. ... i :--¥-. . .. · .. .....-;. ..-- i-..~:....?.---,~--' ..i::~ ~ ~ I-i -:'e '~ii .i i . i, : ·t : 'jI j~~~~~l; :L:-·
? 7.c),,jI.%.
oIi ~' tjt 1
V. ,`C--
........ ]:
·
:.7.i
v,
I

* ?kZ'D 6S~.
f,&W 7YC'/: ,,A'T ......I
A*/D
~~~~~~~~dC,
..
7.
- ~ ~ ~ ~ ~ ~ ~ ~ ~ ' .' ... 0
-i ~ ~ i· .', .; ....
,.~ . ;-. ; .. ~ ..
a~~+6,.00· ... . . ... :. .......
...- ... L.. ., 0.
--400
.1 .- ,
.. I. ·. . . . . .
LeDES~oPA-B~ fA'~, pA-:
F77
4c0 &00
- 7sn =so -0 4-'Ax>>--FT.
- .~ .,. . · - 4'.
":;"o. / "' :'-' ". ' ' ......' 06-40409PX¼'/&5,V~i I'/7'/ G&/zDE SL6'P~
~RC ~ ,7~R ALT,7/D/E
T H E ~~~ -- ~~6 8
i:". . ~~~~~~~~~~~~~~~~.'' : ~.-':
-I-s
/
40
20
*1t
.- two So I dco 4cL..... SAPE-
i{ - I"2r
-836 -6
0
0 I I d i i -I II I I
.... &Po,~ F/T
"L ...i. "ic..... .I -.: .:.... .... ..... ' ....... ....- . ..... : ·: ... ~ .... ;. .-.. .. ..
: ...._,, .,. .
i.~:,:a cs~f_. .._'. __... -...
~rP9 I
'- - 4., _,- j, --- 1 J
\- MW;744N,6E)~~,6 K4v r7
I-I r
r.. . .
. C
:boo
ti

oNohr woWrce4r
fA~ I4.fLS, A'/rA' 4'A' I9Z4P*, Z ?e
1 I. s R -A
. p . .~~~.,. .
,~~~~~~~~~~~~~~~~~~I,.
AIFAV I -Z4A-.4ZkW~ V's
o~~~~~~~~~~~~~~~~~ -,G
:'-~' . - _ _ _ _
-ZOO I00 40
S
': ....
q -~~~~~~ ~GLJDE SLoPE ER~V-qF,:7 FrTF
· CE~ .:A J~2~ ....- ;-t---dS
I
I
-~ ~ ~_._. ..... . .-
~~~~~~~~~~~~~~~~~~~~~~~~~'..
::. 4EAr - JAt . -.. .
-a . . 6
i cr rrac-ow h A4-
APQ ~ ~ ~ ~ A5
· .'.i .!. ~ aCo~cb Pn=2' ' t0 ~,4,/E,,qYEaLi OIs~Fr;1/-?wr
....! ,-4Xs !...
.- ~~~~~:-..=: :.:.:. ..~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ .-i:~~~ ~ ~ .....
...... :"-' ':--' 'la~
i~C:~~ TDi.-.---·: -..... ._ i j
:~ ..

* A4'6 i/v6w 4iC
·7 It ,,9:-ts 0Mv//tAxt4 /,o
: !· :n ':.:. i
0 S"'m -f4- f··~- ·'· -·
.- b - - --. -..
o 0~~
-'~-'-~ IC)V -4 0 ,/2 .5V7
-
~~-.____ o__-. !*- .. .... - '... ..-. 0.2
·A: - ~ I Io s,.- .
.;.....aH~= 2,75' FT/Si~7..:. . ............ .....
-i. '~ 9 i :~._. .ili '.:L7~ :.~ ~5 ~ ... . "7~-~.~..i CPr~ C/47N //t&S/N rjL
L- ..- ___,__' '
'~~~~ 70

· V°7,,5.' -p'",d. .. ......*Aac6 ln~v& 14rAULL S4S p//7Z7 A4/i iAA
*: -U
7CAXTD
-. ,., . :·- · · .- · . .-:---~-
PX713~~ ; . ~z ....6=)h ~C)
0
0 *7
0~~~~~~
O ~ o0OQ*~ ~~~~~~~~~~~~~~~~~~ I
-2,L'Asr
-i G) i : :· ' i O
06
-~:: ·I .... -I. i........... ......- -~ ...... ~ .......... 2.0
-4'0 .......O
Fr,
' 54_'Ae /eeo, ,7-r
= I= -4--_ [o,
=I ......,=f2.a
4d /6-C A7-i Le 2S eiF7j TA
re 7MCAWOWOLA/
.-._..-.. '.*............. ~~~.... ...- .... Z .".' -. ·.....,... .. . . :. . ... ~ . . ~...
K _lL~.kj3C~t 9DEC .LJ ilt~ VN D/SP R'S 'c/Ol: i :/~~A~PAP/S,1AI WIZV S/A3 7A ,~PRe3P
.. . . ~ l S~ ~ [xt"Go7;. r- P.o's-6c_L-· ·. - -. -.---- !-- -----
~..--..... , . ------------------ -.-l
L~· i ~.. · 71.
: ......... -. .
I
_ .:'.....
I,.o
I.-
06-4o~ol

3.6 Landing Distances
Criteria
The landing field length for the STOL airplane shall be determined
in a rational manner to include touchdown dispersions and braking distance
dispersions which account for the following events:
(1) Turbulence up to the maximum design value
(2) Wind shears up to the maximum design value
(3) Engine failure at the worst altitude during the approach
(4) Crosswinds up to the maximum design value.
Sufficient hard runway surface will be provided for underruns and
overruns to cater for the worst combinations of the above cases.
Discussion
In the present study, insufficient data were generated to define the
individual effects of environmental conditions or engine failures on landing
dispersions. However, the results which were taken give a general idea of
the sensitivity of field length to airplane handling qualities. A calculation
of the braking sequence after touchdown was included in the simulation and
this produced a realistic visual scene of the derotation, a good aural simulation
of the thrust reversers, and some impressive acceleration cues from the motion
system which simulated sustained longitudinal accelerations with cab pitch
angle. The calculated distances to stop were a function of touchdown speed,
the braking assumptions being e MAX = .2 plus about 30-40% thrust reversing.
The resulting roll-out distances were nominally 1100 feet, varying
about *5% due to touchdown speed variations. Adding these to the touchdown
dispersions discussed in Section 3.5 gives the total ground run variations for
individual airplanes and for various augmentation system designs. Figure 3.6-1
R
REV SYM - . Yd'l7 jNO D6-4ho1a
IPAGE 72

compares the 3o' dispersions of touchdown distance and stopping distance
for the two SAS cco:figuraticns tested on the awsmentor -wing airplane. The
interpretation of the 3 W data must be approached with care since the data
points are not distributed normally and the number of points is fairly smnll.
However, for use in determining SAS effects on airplane field length capabili.' y,
the 3 ¢ data lends some scale to the comparison. The less responsive airplane
is obviously going to need a larger runway.
Interpreting these data in terms of field lengths may be misleading
as far as absolute numbers go, but Figure 3.6-2 shows the comparison in order
to point out the obvious relationship between the aiming point to threshold
geometry and the touchdown dispersion capability of the airplane. Also
apparent from this figure is the need for more such data to define whether the
2000 foot field is really a possibility.
Figure 3.6-3 shows the frequency distribution and cumulative distri-
bution of the 39 landings accomplished with the responsive SAS on the augmentor
wing airplane. A normal distribution line is shown for comparison. A good
fit to the experimental points appears to be a logarithmic normal distribution
- N | Up t-(Q.u - C:B7
where 0 = standard deviation of the touchdown pts.
Figure 3.6-4 compares this cumulative frequency distribution with
data taken for the 727 airplane landing on 5000 foot fields and data taken
by the FAA for large 4-engined jet transports landing on 10,000 foot runways.
In conclusion, the data obtained during the NASA Ames simulation areo
not adequate to define field length requirements for the configurations
tested. However, they do give a basis of comparison for further tests andD
REVSYM ArLf-A- NOD6-4)40c PAGE
71

for analytical evaluation of the effects of configuration changes. These
data can be used as a basis to design experiments to determine rational field
lengths.
The data show that:
(1) The load factor response characteristics will influence touch-
down dispersions and gear design.
(2) Touchdown characteristics can probably be improved with better
.anding aids.
(3) The simulator can be used to determine field length parameters
if the experiments are carefully designed for this purpose.
~LrFtVZ INo. D6-4o4c9IPAGE 74
a
C
-I
2
.0
P.F.
e0
a
REV SYM *
N
011
I1
I

* INSA AffS c: F,4/M A4O0t'/A'G SlqSE SXL~L/)A#6Ma-fV7-a 1//,6 / 'RCIc,-F7 ('?sI-'o.)
'FU z S,4S 4,/7- A6'X. FA/Z7,, 4'UinA-u/477C ST3'o/,,V G 7,_ t VZ'
No ENICNE Fl,11U-EJS INC.,!.IUD.J
b ~Zc~= .Z
_- . .-
·· . ..
' '. ':,'-2, : . ................
.... u .!...:-__L .: ...... i. ....! .!':j' '-qi::' : ' :';. ~
.... r.. L. ~.. . ;: ' '.
SIMULATOPA'EFP 7vUC//- AIwi STfiPE
DOWVN Po/Ar
77Rxo P7l4LD AZ2OCoC7r RUIYWAY-'
-- SIMOLA"TOV ......TRES HoL13
~ ~~~~_ ~ ~ ~;..-2 ,;.....~.:. ... lj_-.~L..:_
~~7~1
i . I
:: -..-. L." ._ ....-........ :.
LL:_1-L- -.'. ... :. . .... :_.
· : : ' ·· : :": . . .. 75
TIr?=oG S m
20cz0o
.SoO
i.
T7-
0--: z.... ~.
-jcm.
I,--% ' I f
i X.,r,
i-1 ---- '--- II- ..IA ,, t.' i -! -4,- i
: :
I ,-
(
i· i, -
.::.'..; . .'._. I .... ' . ,... ;
L
I1

' " '' :' :
"' "
'' i
' :"
: ...... :.......
i .
...
:
..
.....
·- ··:
· ······-· ··· ·
· ..
: ...
..C
l
~~~~~~~~:.. .
.: .
..
..
..
..............
:
........ ....... .
..
..
.
.. ..:~ ~ ~ ~ ~ ~ ~ ~
~~
~~
~~
.....: :~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~Q
................ .
·i~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
L
.........
....; ~ ~
~ ~
~
~. 14.i·
....... i....::iL
.. ......2
~'~
~~
~~
~~
~~
~t
k~
~~
~~
~~
~~
~~
~~
~~
~~
k
;i ·
-···
·- ·
r ··r ·~
~
~~
~:~
]--
·~--' ·
.:-· :·····
i ... ..
..
: : C
r)~~~~~~tt -
'
... .
:... ..
-.....:
:........
NO
~ ~ ~ ~
~~
~~
~:
: :
::::::.. i.... i.;.....
..
..
..
.. .
...~
~ ~
~~
~~
~~
~~
...
: .-
... ......
.. :....
.: .:.:
..:... .
ul IL
U
·:: fi·:-···
·:!:: U
3
:·····--·-·-···: ··.
'"
·L.
QC
ui
r
::::::::::::::::::::::::·::·::·:::::: ·i:
4
::':":::::: ::::
c
~~~~~~~~~~~~~~~~~'~.c........:-' '"
.....::'
i:.: .:~
.;'.: .;
;......... ....... ..... ..: : .. ..:.: :
..- --g
i ~
~ ~
~ ~
~3
-4
4~~~Z
----
·~·::. ..... .
.
~ "'..:.. ". : ...
.. ;
..' .. .
..
.. .
..
..
..
..
...
.. .
...
.. ... ..
... ..
.. .
...
.. ..
~~~~~~....... ... ....... ...
.. ., .
.. .
.. ..
..
..
;:. !
...... ......'::'
:'. .. .
.. : .. ":... ..
..
~~
~~
~~
~~
~~
~~
~..........
..........::.:'
::::::::::::::::::C: .... ..
:.'.
.............
..
..
.. .
..
..-~~~~~~~~~~~~~~~~~~~~~~~~."..
."'
..... C
::::::. :,: :
.:: .
:
... ...
:.::
~-.-:...
.. ...
......-.-:.-.:.~... ... .....
.-.·
::::::::::::::::::::::::::: ~
~~~~......:..... .
r:-':::::::::::::::::::: ......- ......
i'~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~
.. ..... ..................
..... .
.............
I-':-.i. ::-
-.
.. : ' ·
, ':..
.:::.: ::.:.:'.:-. .: , .....
~,i..:-·:~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~:....:...·
,..,~·...
AP
R::
.....::.:::...::.: .......:...
:P,
::
TH
E:"
: .........
: ..
B.O
..:IG-'::::
....
.~~~~~~~ ~ ~~
::::_
: :....:::::-
l
::: :1
R&
PN
·- '", j
" .........,,-,, ,y
II
:·~~
~~
~~
~~
~F
G
.-il~~~ili
i -···~
~
~ ~ ~
~i....
i::::; i·
: :
: ::: :;.
:. :. :..
:....:.·..: :
: ·
:: :· :
:...:.... I:J
PA
, ,i::...:
~ ~
~ ~
~ ~
~ ~
~ T
4 ::O
EIN
G:::
C©
.:,;/,,,NY
..·...; ··. .i.......---...-·.~.
:.·.:: ·:-:
:?-····- ·I
t
76 :::
L, f
4 -"
�, -1
.".:
uli
o'.
" I
; I
:. .. .
;.,. !
o ~ .
-.
..

LOC, %-T-d-bG,
NOi~.-IvAI.~S.
/C./
2::/¢
//A~~~
: /
...... :AIM PT.
\._ ! O MAL. t1¶.·
.....,0.2
J . c..1
oJ
m
-i- ~... .. I._ ,. J
-·-j.~~~! .... `~T C
: ' "~~~ : :: '':' i ': ..
//
L : :Li .. . ; 1!
- ... ..I.::f...:i::~. -./:/6/~~~~~~~~~ c
t ~ ~ ~ ~
noo) NOWMAL Disx.
T-
i_.,.. .... ir ~ ~ ~~~-- L_.._..- Xro - --- ··· ·- ---i- - ' - l
J~~~~~~~~~~~~~~~~~~~~~~~ ._....,.j_.. _,. '- - ~ i..-1'~~~~~~~~~~~~~~~~~~~~~~~~~~~~·- i--· ;··- ,
t""
I20F:
C, I
D
- z6
=1
LOC1.'a .
I.w
UJ
C.J
~~··~Ye~·llt~·~··BmCI-~~--·crq_·~ppl~Bq~ ·-
n ----~~~~~~~~~ ·-·II a ' ·~~~~~~~~~~~~-aas r~~~~~~·~~~err~~~~~~·~~~f
I., . . ..r - . . . I - .
F~. ,.....,,,E
' -
a
. - I . . . .
aes~~~~~~ee~~'.I
0
Z .~,MAL DIST.

t:(J0
,9 r
L.·~
~~
~~
~:
0~
~~
~~
~~
~~
~~
~
0
·~I
.) :
·: ...'"-
Z
>
Z
:' F
!':~ '-.: :* ..'
u-0
0~
I J
.~~
~~
~~
~~
~~
~~
0~~
~~
~
! -.
t~l .
..
.....
--
: ~ ~ ~
~ ~
rj .............
3~
~~
~~
~~
~~
~~
p
J dl
*rte i;
·a .......
:__. ...
DS
S.........
"A
A .D
4J0
jC:~
~~
~~
~...
'~ i
'' ':'*
'... v.
: "3
..
.-
... :...: .: ..
-
i ' ?": :' ...
·~~~~ ... :':
.i': '.1'
· *
i '.
' ,
.~-- '
-::; -
L' .
..
.... '
0
I .
.: I...__:.. .:~.
.:--. ~ -
: 0
0
i~ ~
~ ~
~~
..~
:.
I~ ,3
~1'
·3
i~~
~~
~~
~~
~~
~~
~i
.-:'
:.:.~....: ....:--, .::>
! .
i .
..
.S
~
LC
~
~~~~~~~~~~~~~~~--..;..'.:- .~. .......-
__-_::;I
....-. i
ii__
i._~~~~~~__. __i~~~
.il

4.0 CONTROL SYSTEM CHARACTERISTICS
4.1 General 80
4.2 Cockpit Control Travels 80
4.3 Control Centering and Breakout 80
4.4 Feel Systems - 81
4.5 Control Harmony - 84.
4.6 Control System Free Play 84
4.7 Powered Control Systems 84
4.8 Control System Dynamic Characteristics 85
4.9 Augmentation Systems - 86
4.10 Trim Systems - 86
4.11 Auxiliary Controls -: 87
4.12 Failures : 88
0*0
p,~~~~~~~~~~~~A .46409
REV SYM OE7A |D6IPA.E 79

' 4.0 CO6INROL SYSTEM CHARACTERISTICS
4.1 General
This section deals wcith those aspects of the'flight control system that
influence the pilot's impression of vehicle handling qualities. The paragraph
headings are conventional, but the customary distinction between primary and
secondary corntrols has been dropped. For STOL aircraft, items such as
throttles, flaps, and trim systems tend to bear close relationship to vehicle
handling qualities and safety. Segregation of these functions is no longer
recommended.
4.2 Cockpit Control Travels
Criteria: - The cockpit controllers shall have the following travels:
Longitudinal +4.0 to ±6.5 inches
Lateral* +3.0 to +6.5 inches
Directional +2.5 to +4.5 inches
*If a wheel is used the maximum travel should not exceed +60degrees.
Discussion: These criteria are taken directly from Reference 7. The
present study used +6 inch column; ±60 degree wheel; and ±3.5 inch pedal.
These travels were satisfactory, but parametric variations were not run.
4.3 Control Centering and Breakout
Criteria: The cockpit controls shall have positive centering in flight
at all normal trim settings. Absolute centering is not required but controller
positioning should be sufficiently precise to provide ease of stabilization
and must be compatible with augmentation system sensor requirements. Centering
forces should not interfere with tracking tasks.
doPitch 0.5 to 3.0 pounds00q Roll 0.5 to 3.0 pounds
,o Yaw '1.0 to 10.0 pounds
REV SYM V NOD6-4
I " 'GE~ 80

0
Sa · Throttle 1.0 to 3.0 pounds
Discussion: These criteria are taken directly from Reference 7. In the
present study the nomainal breaeout forces were 2.0 pounds column; 2.0 pounds
wheel; and 6.0 pounds pedal. These levels were satisfactory for one-hanld
operation. Parametric variations were not run.
4.4 Feel System
Criteria: The slope of the force versus displacement curves beyond the
breakout region shall fall within the following ranges:
Pitch control 2 to 5 pounds per inch
Roll control 1 to 3 pounds per inch
Yaw control* 10 to 35 pounds per inch
Throttle 0
The increase in force produced by a one-inch travel from trim shall be
greater than the breakout force.
Discussion: The force gradients are based on Reference 7. The maximum
force levels associated with these gradients and associated breakout forces
are compatible with the maximum force level requirements of References 5 and 8
except as noted for the pedals. The column gradient range of 2 to 5 pounds/inch
has been retained for compatibility with the requirements for other axes, althoug
Boeing transport experience has shown that the optimum level can be expected
to lie near the upper end of this range.
The requirement relating to the force buildup in the first inch of travel
and the breakout is intended to provide good centering, allow precise position-
ing for small travels, and to protect against pilot induced oscillations, PIO.
It should be noted that for the roll axis the incremental force for one inch
0ci
*The maximum pedal force shall be less than 100 pounds. If a high initial^ gradient is chosen, a nonlinear shape must be provided to limit the maximum8 force level.
_ _ . . .4.
REV SYM "AV WCNO. DN-40409PAGEOl
, r -I

o
of travel (1.6 pounds) used in the present study is slightly less than the
breakout force (2 pounds). This was considered to be satisfactory and
would suggcst that the gra?-ietrt-b-.out criterion is _.pr.-izmate.
The present study was run with nominal linear gradients of 5 pound per.
inch (50 #l/g) on the column and 1/6 pound per degree (1.6 pound per inch) on
the wheel. The pedals used a nonlinear gearing as shown in Figure 4.4-1.
These sensitivities, in combination with the breakout levels of the Section 4.3
discussion, were satisfactory for one-hand operation.
A limited study of column force gradient and gearing (inch/g) was con-
ducted. The results are surmmarized in Table 4.4-1. These data suggest that
the optimum longitudinal force gradient is a function of the longitudinal
gearing (Runs A, B & D). The pilot selected a column sensitivity of 50 pounds
per g as near-optimum. The accompanying lateral gradient was 1/6 pound
per degree and the lateral sensitivity was 0.134 rad/sec2 . Other lateralinch
sensitivities were not examined. These data also show that the choice of
longitudinal force gradient is influenced by control forces developed in flare
(Compare runs B and D).
The choice of column gradient must be based on harmony, inner loop
dynamic response, sensitivity (Fs/g), and trim force considerations. The
force gradient criteria of this section should, however, provide a useful guide
for preliminary control system designs.
TABLE 4.4-1
FORCE GRADIEIT GARLING F STICK
EN, LATEPL LCNGIITUDINAL iL /g PER g PILOT C0?',-ITS
A Il/6i/deg i 5/in 15 in/g 75?#/g Lateral forces good but lat-(1.5 #/in~ long. harmony poor
B l/6rl/deg 5/lin 10 in/g 5 /lg fHarmony good; forces goodC l/~6/deg 5#/in 5 in/g 25#/g Forces and dam-pirn decreased
slightlyD l/6S,/deg 10//in 5 in/g 50VF'/g Forces undesirable in flare.
Pitch sens. O.K.E il/Q:/deg 7.5//in 10 in/g 75#/g Deterioration
S.
o
o
2
p.
p.
REV SYM Lr ,a/ , .NO. D6-40109
PAGE82
-
I

:' .': : ' i I ' ; ! : '. i "' '
... : J ' :. :. :... . .i~~~~~~~-~
: :;
· . . : : .. i. . .'·~~~~~~~~~~~·c
-11: !o i: .....: .... .: . .
QC.- ....: . . . . . ~ ......- . .............. . ...... ........... ... ....... : ':, . -- ; .. ... .'.. ...
CL~~~~~~~~~~~~~~~~~~~~~~~~~... . -:.::.. .... ...........:.........:..........
~ ~~~~~~..............m~~~~~~~~~~~~~~~~~...... '" ...... .....'":i :' ...i..i..."':i:::" :4......':..;': ~~~~~~~~~~~~........:.. ~ : ' ' ~'~ 0 L
i .. . . :~~. ..... : :' ........ ....... : ...... :";.....::: " ''... FUL PEDAL..:' "-!: ~~~~~~~~~~~~~~~~..-:. !... :' :::13 : :. 'i!.! " ' ~:!.~~~~~~~~~ ~~~~~~~.'!......'X:.:. ...........:...L:'...:.i:.!:..':.. ..... ... 'F.....:I....
'"":'":'~ : ........ i~~~~~~i~ : ': ......... ~~~ ......... '".......· :": :. ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~~~~~~~~. .... ........ . . . . . ',
-:_~~~~~~~~~~~~~..:.~ ..... :.......... .~..
: .:..::;:..I i :':~ :I
:"";' :: ' i!.i:i.:..-:i:'f-:' ' :";'.
P~~~~~~ ........... 2/ EFLEECTION:::''U. .T .
... : ..... :...: .... :::::: :: ::::
-4~~ ~~~~~~~~~~~~~.: : 3.0 : ::..:::::::. :.:- :-:/.O J 2.0.0
[ ....~...... i....:.-. ~ .F.LL .E..L
::::: ,-:... 20........................ ..... . .. . . . . . . . . . . . . I lv Jp IF:': ~~~~~~~~~~~~~ ~~~~......DE L C /N.. .:;;i: ixi: .i qB':....... . :.:...:!:: .. ; .:.
. . .. .. .. .... . .. .. .. ....
~~~~~~~~~~~~~~~~~~~~~~~........................ .... ... .........
:~~~~~~~6·.
·:; -3.0 :.. -:.. .. ... . ... .. ... ... 7 . _ .
.' :: . : : ............ ....... . .. -- ----.---
i::.....: ... ........... '....
i:: :~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
·..- ....-....... .
k :""-:--~: i::':-': r:'l·· :: -:'~:'-T: :':::- I iii-i ....."'':::~i'~!:!!!i' "i i i::::i!-i- '' : ' : " ' +! "L '- : x -'" . . . ' " " . .: !- .. :...::.. :...
.:..: ....... ::: : :::::::. :::I: :· ·· - ( · - !·· ·: 1::: ::~ ~ ~ ~ ~ ~ ~~~~~~~~~7:..
F";~·: ··: '':- ' ::.. . :... ... ::... . .. .... ... ; . ... .. . .....:. . . ... .. ! . . - a .. . .. .. . .
]:: ] ] '. ; . ;'. ;:..... ... , ,,...... ..... . . ... ...... ..... ...
. :''::':::'. ::': i ....... :' .::::::.:. : .:. : .. :
':'';";: '::: ~':;::":';.. ....... ::::............... .:":.. .....
~.;;~~~~~~~~~~~~~..;._....;..;;.......:.... . ' _ ----------- -- ;..-..gL...;;L:_.:..£;;;;:.:'..- :7'.;. .... ....... ;...'_.-; .. :..: .:. .;:. .. '..... .......... . . . , ........ .. ............ ..... ....... . . . . .
, ......... ........................... ....... ........ ................................ ; ..... ;..::....;.:·
-- : . ."...;..... ' . . .. . .. : .. . . . .: : .....: · : .........-i..... '.". . ... ... ... ........- .. .:.:.:
.............. - --------- ------------ .. ... ... ....... ._:... .: .:
::.. . . ......... !.. ·:::::: I ~:.-. .:.: i:.:j..·:.~.. .. ,..-.................. i...........,...... ................ ;
i.. i i -~~~~~~~~~~~~~~.. ... . .. ...
i:-il·'.i~l.i:-:i 'I:'i::i::ii:.l..1.......:.. . .:::::.. ..:... .. ·... ... . ........ . .... ..···:--:·
7 :: . ..... .. . ....... ·:. :: :. :::: .. ·:
.. ...:~....::. ::. 1..:.:.:: .. . .~.I:..... ... ........- ......... .......
i .................. .......... ... . .......-i: i: ···········-
CALC 1,fACK 7/1/7/ IPF-'tV. I oATE&
DIRECriONAL - CONTROL FORCE DS-4040?CstCr.
C _______ -CKI ~~.CRARAcrERTIr c sA~R IiFI. 4.4-I
TPR
THE BOEING C:,:?A,\N'r '

4.5 Control Hiarmony
Criteria: Longitudinal and lateral breakout forces, force gradients,
travls, mand ser.sitivities, shall be compatible so that Lntentiornal inputs
to one control axis will not cause inadvertent inputs to the other.
Discussion: Control harmony requires careful selection of many control
parameters and specific criteria have not been formulated. In General, final
selection of critical control system parameters must be based on piloted
simulator studies. The control parameters used in the present study are found
in Sections 4.2, 4.3 and 4.4. Control harmony was judged to be adequate.
4.6 Control System Free Play
Criteria: Free play in any of the cockpit controls shall not result in
objectionable flight characteristics. Particular attention should be given to
small amplitude control inputs in critical tracking situations. The analysis
of stability augmentation and automatic control systems shall include appro-
priate deadband estimates.
Discussion: Free play produces an amplitude-sensitive phase lag in the
control system response that can degrade pilot performance in precision tracking
maneuvers and can result in PIO. Free play can also cause limit cycle problems
in automatic control system designs.
4.7 Powered Control Systems
Criteria: The ability of the aircraft to satisfy the stability, control,
and handling qualities criteria shall not be limited by any powered control
system component. Powered controls shall be capable of producing the de-
felections required for all operational maneuvers. The surface rate
capabilities shall be adequate to perform critical combined axis tasks such
as approach and landing in a heavy turbulence environment. The effect of
engine speed on hydraulic flow rates shall be included. Actuator hysteresis
shall be compatible with the requirements of Paragraph 4.6.
Dff? ! .ANO. Do-40409
PAGE 84
I
p.
0g0
0a.
REV SYM +
I
I
INC
JI-1

Discussion: Certain components in powered control systems typically
require careful design attention. The ability of control surface actuators.
to produce the required icflct' ons recquircs that actuators be 3ized for
blow-domn with the appropriate combinations of hydraulic system failures.
It is further necessary to provide overtravel in actuator command paths so that
actuator compliance wrill not limit the deflection under load.
Simultaneous surface activity that occurs in critical flight conditions
such as approach and landing with heavy turbulence and pilot in the loop can
place severe demands on hydraulic flow capability. Oil temperature effects
and the effect of engine power setting on pumping capacity must be included
in this analysis. The effect of command servo rate limiting must also be
included. A piloted simulation in which the hydro-mechanical systems and
components are accurately modeled and atmospheric turbulence is represented
by continuous power spectra is desirable.
4.8 Control System Dynamic Characteristics
Criteria: Control system dynamic characteristics, in combination with
airframe dynamics shall provide satisfactory aircraft handling qualities. The
frequency and damping of the cockpit controllers shall be selected so as to
provide good pilot performance in tracking maneuvers. The cockpit control
deflection shall never lead the control force for pitch, roll, yaw and thrust
controllers.
Control system oscillations shall not degrade aircraft handling qualities
or safety. Sensor and direct component coupling through structural modes
shall be investigated. Control system response shall be quick enough to
provide the overall vehicle responses required in Sections 5.3, 5.4, 7.1 and
O 7.2.0
° Discussion: These criteria are based on References 7 and 8. The criteria
o for feel system lads and overall control-vehicle frequency response of
REV SYM aNO. D6-40409I U
IPGEt

Reference 3 have not been used due to lack of supporting data for STOL con-
figurations.
4.9 Aume0ntaticn Svstems
Criteria: The stability augmentation or co.mmand au-mentatior, system
shall be designed so that when functioning normally no adverse air or ground
handling characteristics are produced. Particular attention shall be given to
operation in turbulent air, on-the-ground operation where control surfaces
might be driven hard over, and maneuvers where component authority limits
or saturation could occur.
If aircraft handling characteristics change significantly with SAS
failures, redundancy levels shall be compatible with handling qualities
requirements for a given level of aircraft flight status.
Discussion: This para-graph is redundant with that proper compliance with
other criteria should guarantee acceptable auCgentation system design. Ex-
perience has shown, however, that some items tend to be overlooked in the
design process and must be given -good visibility if a timely design is to be
achieved. These criteria are included for this purpose.
These criteria are based on References 7 and 8. They are intended to
direct proper design attention to component authorities, saturation limits,
bandwidths, and reliabilities; system control laws; sensor locations; system
redundancy levels, etc.
4.10 Trim Systems
Criteria: For all flight conditions where continuous operation is re-
quired, the trim devices shall be capable of reducing the control forces to
zero. Operation must be smooth and free from mechanical cross coupling effect
The trim controls shall be conveniently located and must provide the pilot
o with an indication of the amount of control remaining.
Powered trim systems shall be drift-free and shall have runaway pro-
D tec'ion ate cap aTgilities shali bse s,t.. en huh to prevent excessive
REV SYMPACE

.I force buildup, but not so rapid that overcontrol results. In dcterminin,
rates and aithorities both low and high speed flight conditions shall be
considered.
-siscusion: Hcsn crltcria a'e based oin _fetert,' -i aT nd 3. The requi:'-
ment for position indication is satisfied directly for parallel systems where
controller zero-force position is varied. For series trir sy.Stems, or control
systems utilizing an integrator in the forward path, a trim position indica-
tion must be provided. For optimum operation in approach and landing it is
felt that it must be possible to trim the steady pitch and roll forces to
zero following a critical engine failure.
4.11 Auxiliary Controls
Criteria: The design of the auxiliary controls shall be compatible with
their specific relationship to vehicle handling qualities and safety. Cockpit
controllers shall be conveniently located and functionally compatible with
pitch, roll, and yaw controllers so that harmonious operation shall exist for
all flight modes and operations.
Control functions such as thrust vector, throttle system, flap system,
drag and lift devices (other than flaps) shall be drift free and shall have
adequate rate capabilities to insure proper operation for critical flight man-
euvers such as approach and landing in heavy turbulence. Combined axis re-
quirements shall be investigated. Special attention shall be given to
minimizing system time lags.
If automatic control of these devices is used to artificially produce a
given mode of control (for example, conventional aircraft flight path control
mode on approach), consideration shall be given to change in control technique
resulting from failures as discussed in Section 4.12.
~o Discussion: These criteria are intended to focus design attention on
0 controller and control functions that have traditionally been considerd
secondary. At present the configuration of STOL control systems is largely
REV SYM 0z jF lNo.D3 .!.OI;09
IP A aG8

unknolmn. It is possible that conventional cockpit controllers Will be re-
tained and that complex interconnections between auxiliary controls wrill ,
used to produce conventional airplane response. It is also possible tha!t .:;a
piloting modes will be developed and that hew cockpit controller conlfig;ura.
tions will be used.
STOL aircraft that have high powered lift levels present unique control
system design problems. A critical area is flight path control on arnroach
and landinr. which is discussed in detail in Section 5.0. The natural
characteristics of the poWered lift STOL vehicle require a mode of operation
in which flight path is tracked with throttle and speed is controlled wtih
column. This technmiue is foreign to fixed-w'ing airline pilots with con-
ventional training. It is possible to change the characteristics of the
powered lift STOL, through automatic control of aux.iliary control devices,
so that conventional fiXed-;ring piloting techniques can be used, but this
results in a more complex control system design.
Begardless of the approach that is ultimately chosen, it is.apparent
that systems such as throttles, flaps, thrust vector control, and so forth,
will have more stringent response and reliability requirements than they have
traditionally had. In the present study only conventional cockpit controller
(column, wheel, pedal, throttles) were used. For system configurations where
auxiliary control functions rere used, (for example, trailing edge flap
modulation), these motions were commanded by augmentation system and con-
ventional controller cormands. Additional controllers were not introduced
into the cockpit. Boeing simulator experience has shorn that a pilot will
degrade his rating of a configuration where his hands must manage more than
two primary control tasks simultaneously.
4.12 Failures
Criteria: In selecting the normal aircraft flight control mode, careful
REV SYM R'iA' ,o. DG- 1401 09Q-
PAGE

consideration shall be given to the flight control system cornplc:ity zeaivr
to develop this mode, and to the changes in aircraft piloting technique t;a~
car. result from probable flieglt control system failues. ~ergency nilbti:;
modes 'hlat require spccial pilot training are dangerous and u-nacceptale
unless it can be guaranteed that every pilot wrill halve, and retain, the
special skill level required.
In designing the flight control system, redundancy levels and positive
warning devices'.shall be provided as required to match the sIill levels of
all possible crew members.
Discussion: This document deals with normal handling qualities and
these failure criteria are therefore concerned with those considerations
that influence the choice of normal control mode and the related configura-
tion of the flight control system.
In the Section 4.11 discussion, it was pointed out that the natural
characteristics of po^wered lift STOL vehicles lead to a piloting mode that
is foreign to pilots with conventional fixed-wing training. A more conven-
tional piloting mode can be produced by designing a flight control system
that introduces coupling between basic and au=iliary controls. The danger
that exists is that if a flight control system design is selected that pro-
vides a conventional piloting mode, there are potential system failures that
can drastically change the piloting technique required for continued flight.
The designer has the choice of specifying special training for the flight
crew, of providing system redundancy levels that will preclude dangerous
system failures, or of accepting the operational penalty of diverting
from the destination STOLport to a conventional length runwray after a
failure.
0
0
REV SYM DO-4040 |PAE 89

------ 'Pla;-c -
5.0 LOINGITUDIThL CONTiROL
5.1 General Discussion
5.2 Control 1echiniquos, Related iarnmeters, ansd System!nTested
93
5.2.1 Control Techniques (Includes Definition of 93Controllers)
5.2.2 Parameters Influencing Control Techniqucs 97
5.2.3 Control Systems Tested 114
Pitch Control 124
5.3.1 Pitch Control Power 124
5.3.1.1 Static Balance Out of Ground Effects 125
5.3.1.2 Static Balance In Ground Effect 125
5.3.1.3 Maneuvering 126
5.3.2 Pitch Control Sensitivity 130
5.3.3 Pitch Rate Response 132
Flight Path Control 135
5.4.1 Glide Slope Control Powrer 135
5.4.1.1 Incremental Normal Acceleration 135
5.4.1.2 Incremental Flight Path Angle 136
5.4.2 Flare Control Power 141
5.4.2.1 Incremental Normal Acceleration, 141Free Air and In Ground Effect
5.4.2.2 Incremental X 145
5.4.3 Flight Path Control Sensitivity 146
5.4.4 Flight Path Response : 148
5.4.4.1 Load Factor and Vertical Speed Response 148
5.4.4.2 Thrust Response 153
Speed Control 156
5.5.1 Speed Control Power 156
5.5.2 Speed Control Sensitivity 156
5.5.3 Speed Response 157
5.5.4 Stick Forces During Speed Changes 157
~E'~'A'G N NO. D6-40409 +90PAGE
5.3
5.4
5.5
0t.
a
0rrO
g
C
0
0
REV SYM
V0P-4CJI-1

5.0 LONGITUDrINAL COITROL
5.1 General Discussion
The longiudinilal contr.ol rlteri haeL been expressed in terirs of t:e
control- pnower, control sensitivity, and dynamic response requirements, for
control of:
o Pitch attitude
o Flight path
o Speed
Satisfactory pitch attitude control is treated as being necessary, but not
sufficient for satisfactory handling qualities; and the required attitude
response depends on whether attitude is used primarily for flight path control
or speed control. Two piloting techniques are defined to distinguish between
these two approaches to attitude control, and the criteria are related to the
piloting techniques.
Load factor response is used as the fundamental parameter in defining
satisfactory flight path control. Speed control criteria are not well defined
but tentative criteria are proposed as a starting point.
Flight path and speed control requirements for STOL were found to be
similar to both CTOL and VTOL requirements, which suggests that it may
eventually be possible to develop a common criteria in terms of those para-
meters. Differences appear to be related to the sink rate on final approach,
the glide slope angle, and the distance between the glide slooe transmitter and
the desired touchdown point.
The current study was conducted with an 80 knot approach speed, a 6 degree
glide slope, and a distance from glide slope transmitter to center of the aim
c ,zone of 150 feet (Reference 4).
For this configuration, it was found that the load factor response
q time had to be quicker than for CTOL, and the load factor authority must be
REV SYM .O'i'/. IO |o D6-40409REV SY ""WZV" NO
|PA(Er rJ.I ' J

more than required by VTOL criteria.
It was found that flight path response has a strong effect on the
rernuirel fiel.d length. Pith a steep Egl;e slose wan n-clctivelY short
distance between the glide slope transmaitter and th'e aim point, it is nece£.zary
to ma:e arn abrupt flare fairly close to the runwray. If the flight path resCOn:;e
is sluggish, the flare rust be initiated at a higher altitude, which results
in landing long. If the pilot delays the flare in an attempt to hit the ain
point with the sluggish system, the result is likely to be a short hard
landing, or an over-flare and float to a long landing.
The longitudinal control criteria apply only to configurations which
require continuous manipulations of no more than two controllers in order to
control attitude, airspeed, and flight path angle.
In the interest of verbal simplicity, these controllers have been called
"column" and "throttle". The term "column" is used for the pitch controller,
since columns are commonly used in transport aircraft. However, it is not
intended to rule out the use of sticks or push-pull controllers. In conventional
transports, the "throttles" are used to control engine thrust. However, within
the context of the STOL control technique definitions, the "throttle" might
actually be the controller for thrust vectoring or direct L/D control devices.
WThatever device the "throttle" actually-controls, the pilot should not be
required to remove his hands from it except for momentary and infrequent
actuation of a "trim control" or to make a discrete configuration change.
0 REA'FZ No. -40 09
REV SYM 'Eiv jNOD~ 3-¾OI0 O.
^PAGE 92

f 5.2 Control Techninues, Related Parameters, and S7ystems Tested
5.2.1 Control Techniques
Criteria: .The 3oxLnzhld.i aaylliaS provide .ir-ect and rapid control of
pitch attitude. Aft coluin should produce a nose-un response. Forward column
should produce a nose-down response.
Short term response of flight path and speed should be compatible with one
of the followiing piloting techniques:
Tec!mnicue 1l - Pitch rate/attitude are used to control load factor/f ligt
path angle. The throttle is used to control airspeed.
TechnicUe -2 - Pitch attitude is used to control airspeed. The throttle is
used to control load factor/flight path angle.
Subsequent longitudinal control criteria have been related to these two
techniques.
Discussion: Before establishing criteria for controlling a vehicle, it is
necessary to define:
o The variables to be controlled
o The controllers to be used
o The control technique (cross-check logic) to be employed by the pilot
These definitions are sometimes omitted in the flying qualities literature
for airplanes, because the piloting techniques and the response to contol inputs
are generally well understood. Longitudinal handling qualities criteria for
airplanes (e.g., Ref. 3) are written with the objective of providing satisfactory
control of both airspeed and flight path (about a given trim point) using one
controller only (the pitch controller). An exception is made in the case of a
landing approach on the "back side of the drag curve", (i.e, > 0),
o where the criteria allow the use of thrust to control the speed divergence thatO
Mresults when pitch attitude is constrained (by the pilot) to the attitude re-
quired for traci-dng the glide slope.
REV SYM SDEYI' Iho D6-hC4091PAGE 93

r
A powered lift STOL aircraft, by definition, is not an airplane. The
STOL flight envelope bridges the gap between VTOL and CTOL; and the STOL
response to control may runz the gapmutt f'rc a VTOL-type response to a CTOL-type
response, depending on the magnitude of the powered lift effects, As a specific
example, advancing the throttles in an airplane produces primarily a forward
acceleration; whereas in some STOL aircraft advancing throttles produces prima-
rily an upward acceleration.
If the STOL response to thrust application is primarily a vertical
acceleration, then control Technique #1 (conventional jet transport technique)
simply will not work. However, control may be quite satisfactory if Technique
2 is used. In fact, some of the powered lift characteristics which make the
use of Technique #1 difficult or impossible tend to enhance controllability with
Technique #2.
Consequently, one of the first and most important decisions for the STOL
aircraft control system designer is whether to:
1. Add the extra control devices (modulated flaps, vectored- thrust, etc.)
necessary to force the STOL aircraft to fly like an airplane; or
2. Accept a response compatible with the natural STOL characteristics,
but possibly unfamiliar to airplane pilots.
The first approach may require a heavier and more expensive airframe; and
has the potential disadvantage of forcing the pilot to switch to an unfamiliar
control technique if the stability and control augmentation system fails. The
second approach may require a faster engine response, and additional training
time for pilot checkout.
It is expected that vehicles with satisfactory (though quite different)
r handling qualities can be developed using either approach. However, different
r piloting techniques will be required; and the criteria will be different in
e certain areas. In an attempt to accommodate both design approaches while
REV SYM JWl, ' o. D6-40409 >IPAGE L94

while retaining enough specific numerical criteria to be meaningful, two
different piloting techniques have been defined. The longitudinal control
criteria have then beern etad to these o tsc.nisues.
Both techniques require that pitch attitude be controlled with the colum.
This;is consistent with existing VTOL and CTOL practices; and there is no
apparent reason why STOL should be different. With attitude controlled by tle
column, attitude and throttles become the two controllers available to control
speed and flight path. The difference in. the two techniques is whether the
cross-check logic associates a speed error with a need to make an attitude chanz->c
or a throttle adjustment. It is recognized that with either technique the
pilot must coordinate attitude and throttles as the situation warrants.
However, the distinction between the techniques is one of emphasis.
The two piloting techniques defined by the criteria are sometimes
referred to as the "front side" (of the drag curve) and the "back side" tech-
niques, respectively. However, the need for using Technique ,2 could arise
from several factors other than being on the back side of the drag curve. These
factors are discussed in Section 5.2.2.
Reference 9 discusses the two piloting techniques from a pilot's point of
view; and makes the important observation that flight on the back side of the
drag curve, while not difficult, requires continuous control applications
with both hands -- one on the column and the other on the throttle. Since
most unaugmented STOL aircraft will approach on the back side, the pilot
should not be required to take his hands off the column or throttles during the
approach. This requirement may be unduly restrictive for an experimental air-
craft, but it is considered reasonable for routine airline operations.
Speed and flight path angle are considered to be the two primary
controlled variables because they determine the touchdown point, landing
impact, stopping distances, and (in combination) the stall margin. This is
REV SYM f,'E"A/' | NO. D6-40o0og
PAGE 95

not meant to imply that the pilot must fly a reference approach speed or thlat
the cockpit must contain a X indicator. As pointed out in Reference 5,
angle-of-attack is sometim.es more usefu\l than speed as an approach reference;
and vertical speed indicators are normally used for flight path control.
Certainly the full complement of instruments will be used in the cross-check.
Whatever instruments are used, however, the net result must be precise
control of the length and direction of the total velocity vector (i.e.,
speed and flight path angle).
WOFAuOV" INO. D6-40i9og
PAGE 96
w01O
P
7
I2
aoo00
P.
o0
o
REV SYM
L

5.2.2 Parameters Influencing Control Techniques
Criteria: - The choice of control technique
atas..ttati cn is i4fluen-cd by scvcra.l parne"tcrz.
ones are tabulated below. Parameter values should
indicated:
and/or the requirement for
_So2 of the more important
be within the range
TABLE 5.2-1
L I M I T SPA R A M ET TEC E 2R
_ECHNIQL2 -i ¢ i TEC11NIQUE
n_/o - .04 g/degree O0(See discussion) (See discussion)
a)/bV at <+ .06 deg/knot* Unknown
constant thrust 4 .2suggested
A QL /~ - > 0.75 Unknown.at constant V ! Negative values
undesirable, but! allowable.
-aQ/ V <0 Desired -. 6 deg/knot
at constant & V
_ .&
1 T - efective Unknown ; Unknown thrust vector angle 45 Suggested 13-90 Suggested
,. .gst . .i
*Also the difference in a/ a V between VMiN and Vin-5.exceed .05 deg/knot.
knots shall not
Definitions of the parameters are as follows:-nz/ = the steady state normal acceleraticn change per unit change in
angle of attack, due to a column input at constant speed withthrottles fixed.
D6-40409BLJA~ PAE 9 N7o.
PAGE 97
Io
0
P.
aI00
o
o
p.
I.0
REV SYM +

r/V = slope of trimmed Yvs V for speed changes resulting fron
columln inputs with throttles fixed
3/~ ~.= slope of trimned Q vs ( iwhen ! is -changed at constant V
-4B ja = slope of trimmed G vs V when- V is changed at constant Y
X1 T = ta[n - ( 1 ] - where L and D include all thzr.'
effects. The effective thrust vector angle, 'q T, gives
the direction of the initial reaction to a thrust change,
as indicated in the sketch below
V
-AD
thrust vect:or
e insight regarding the controllaility of an
Discussion: Considerable insight regarding the controllability of an
aircraft can be obtained from an examination of "static" trim and force.data.
The criteria presented here are intended to direct attention at several "static"
parameters which have a strong effect on controllability and which are relatively
easy to use in the preliminary design phases. Data for the configurations used
in the current study are summarized on Figures 5.2-1 and Table 5.2,2.
The proposed limits are very tentative and should be the subject of
additional studies. A discussion of each parameter follows:
A. nz/oC - Definition
The definition of nz/o for STOL aircraft is modified from the
definition given in Reference 8 in that "throttle fixed" has been0
added. While this presents a problem in testing for nz/do ato tv
REV SYM - _ ~4'JBzZAb; NO. D6-40409PAGE 98 6-7000
,~~~~~
I

t ,
C0
0-4
Oft0
ej
o u
Q
B'
(Jui
I- a.
CELii
1-
-r.
c3
" C
Je s_
o
II>
01-IIIII
O
O
LZ
-2:
CCo
-
>- I:H
I-
f- 1-.-.
)
Li-.L
.
" r
I--,-
H-
0 COII
4r
iI
0..
f.
...
V
.N~
o
II
( \ O
-t! @,.S
I,)0 f-CC)
0*.6"~G
O
i-/)
_ =
HZ
C
CO
c
:- I--
O
cc
O
CD
F. C
. la:
S.--10L
<_
, _F
_
wLJ L
J
O
III
>0
COM
PARISON
OF LO
NG
ITUD
INAL
CH
ARAC
TERISrlIC
O
F U41.
WIN#G
AND E
BF
MfODELS
I-3 lLw
-J o-D
LL*L
i
*0
wL
L
LL
'
'.JC
c: I--_
LH
'--- 4--
Od
J uI-..
C.) U
)
DC
:V)
0 Z
cI,
,.
o:
2:F---
HI-
" C
)
CL.O
0- ...-. w
.Q" L_.D
6-4
0409
I\ 5.G
-1-
?PAE
99
-I.
LU
!.:_
CD7--C
-I-
Q3:
IIl
CD-J.. )
C)
F'-
c:5
C,
c/)
L:_-
_ ,_1
CD_(
EN
G i.
14
. A
LL
'scN
-1pt1
c-iji:
;c--
#_^
HI, ~
' -
..
iE
>G
l g
I~o 79C
{t ;i'f
AP
i
AP"
H-
I.--6-4
_-J
-�DC
II�L�-·D
II--
i__
II
II
_ I
.I
I ·
r-I
iII. I !'V
--
.r

6/ASIC A\IF -AM Q(NO SAS-)DAT, F OW CONFI G UrnON5 TEST-.
PARAMETE- . AUG. WING, . E'B F
-n 0. mB/ 0.V 0. 0 2 C
.>Y/av . -7.\ l .o.\sDEG / Kt0o
bEG| DuE6
NON- LI NEAR- LI tJ EA Rvtc /yNo-t-r WITH RZEVEI~SALS
'70
V AR IES W 17T4 CONSTAN WIT l5PEK t SP EE'
NMbTE: 1. SLOPES MEASRED :T. Y = -cV=o stNO TATmiM P014N2. BOTH CON-RGUTON S UN'L(ABLE. WI" TEC 1iNQUE\3. ERIF MAGINALLY 5ATISFAC.TCR-.Y '\IT TEcHINIGU'I' -4. ALG. WING UNAC.CEPTASBtE WIT1H TECHNIQUE' Z
ENt, I LLL_ [T-r V ""_'REVISEOD DATE COMPAiOTDN -PA6-404 0 ?CH[CK! ~D_..ELATE.DO TO C..O kO - I^A, TE.CH N I Q U E. 'SE 'EJ..5CT a ON
-- M A_: . 5.2-.
= ll = ='¶'.'/, 100
A
B
C
E
*1b-0 7A 1017 7

"constant speed", it is considered necessary due to the effects o:
blowing modulation. If thrust is added to maintain constant speed,
the resultant load factor incrcrent could give a much higher
apparent value of nz/( than if only a column innut were made. ..ir.c
nz/0 is one of the parameters used to determine if flight path can
be controlled and the aircraft flared via attitude chances
(Technique il), the effects of throttle inputs should be excluded.
However, automatic blowing modulation or other DLC devices that functior
with the throttles fixed may be used to augment nz/ o( , and are not
excluded by the definition.
A possible way to test for nz/o is to begin a pullup from a shallow
dive with throttles fixed, and measure the t nz and iotC at the
instant speed returns to the trim condition. The throttles-fixed
constraint is, of course, no problem for an analytical calculation of
nz/ .
nzAo(- Control Technique j1
When using control Technique #l, the aircraft is pitched by means of
column inputs to develop load factor. In the absence of thrust or
blowing modulation, or other DLC devices, lift changes must be
produced by angle of attack changes. nz/o4 is a very important
handling qualities parameter for landing approach in that it in-
fluences:
o the pitch acceleration ($) capability required to achieve
a given vertical speed crossover time, as shown by
0 Equation 5.3.1.3.O
0
REV SYM ' Jo. Do409 PAGE
101

o the control anticipation parameter, (Q/gcol) x (Sg' 0/.un )
as discussed in Paragraph 5.3.2 and in Reference 3.
o the attitude cb.ange reeuired to i'].are.
The nz/d. > .04 g/deg limit corresponds to the value suggested in
Reference 8 for determining the conversion speed between "airplanes"
and "STOL aircraft". It is about midway between the 1XIL-F-3705,
Paragraph 3.2.2.1.1 lawer limits for land-based and carrier-based
transports. Since control Technique #1 is an "airplane" (CTCL)
control technique, "airplane" criteria should apply. If nz/( of
the unaugmented airframe does not meet the above requirements for
Technique rl1, then:
o nz/bK should be augmented by means of thrust or blowing
modulation or other DLC devices; or
o Technique #2 should be used.
When blowing modulation or DLC is used, the angle of attack change
required for an incremental increase in load factor can become zero
or negative. Hence, nz/O( can become infinite or negative,
respectively. In this case, the negative nz/O( would be acceptable
even though the criteria prescribes positive values; provided the
AQ/lhX requirement is met.
References 3 and 8 indicate the minimum nz/P( criteria are someiwhat
arbitrary, and should be the subject of future study.
nz/o(- Control Technique 1'2
f. ,.
When using control Technique #2, direct thrust reaction or blowing
effects on the aerodynamics are used to develop load factor. Con-
sequently, angle of attack changes are not required to initiate a
REV SYM E | NO. D6-40409J-.o- .- _.|PAGE 102
-r

flight path change.
Maxnimum and minLaun rm/o limits have not been determined for
Technique iF2. Since a rotn£ly non-aeroOj-rnaic V&OL vehicle such as
a "flying bedstead" could be controlled with this technique, it is
expected that nz/o as 0 is the lower limit. Howrever, positive nz/od
is desirable to provide vertical damping (Zw), to minimize the re-
quired throttle activity, and to facilitate flaring. If nz/t
becomes too large, excessive throttle compensation would be required
to maintain tim flight path when the aircraft is pitched to change
speed. In this case, Technique #1 should be used; or, if this is
impractical due to unfavorable values of the other parameters
listed in Table 5.2-1, "negative DLC" should be used to reduce the
effective nz/C(.
The nz/O( limits for this control technique should be determined in
future studies.
B. -/$V Control Technioue ' l1
The slope of the flight path angle vs speed curve, A/z V is
related to the slope of the trimmed drag vs speed curve. Positive
values of a(/V are associated with flight on the back side of the
drag curve. The significance of. ./V is thoroughly discussed in
numerous reports, e.g., Reference 3. Briefly, when on the "back
side", drag increases if the pilot slows down and changes attitude
as required to maintain the flight path. With the pilot (or auto-
pilot) attempting to hold a fixed flight path using pitch control, a
0 speed divergence results from the drag instability. In a conventional
airplane, the speed divergence can be stabilized with throttle
REV SYM 4,' J ,V o |N D6-40409 .
iPAGE 103

(or autothrottle) inputs, provided the divergence rate is not
excessive. HIence, there is a need for a limit on the allowable
instability.
The Z/ V . .06 deg/knot limit was taken from IEL-F-3785, wihich
was based on "elevator only" control of flight path, i.e. control
Technique i1l. This limit was based on experience with conventional
airplanes, for which the effective thrust vector is oriented forward
along the horizontal axis. As discussed below, the thrust vector
for STOL aircraft may have a significant vertical component. The
effect of thrust vector orientation on the allowable By/) V in-
stability has not been determined.
)X/ b V - Control Technique #2
Aircraft can be controlled with Z6/ aV more unstable than the limit
specified for control Technique #1. However, as discussed in
Reference 9, experienced pilots will tend to switch to control
Technique 12 when very far on the back side of the drag curve.
With this technique, attitude is varied to eliminate the speed
divergence; but the throttles must be used to retain the desired
flight path. Limits on a/b V for this technique and the effects of
thrust vector orientation on these limits, are unknown. In the
current study, flight path control was marginally satisfactory for two
unaugmented configurations having bV/6 V ~ +.2 deg/knot.
C. A Q/&Y - Control TechniQue -#1
When a conventional airplane makes a constant airspeed climb or
e descent, o4 remains essentially constant, so 69@/k& = 1. This needo
not be the case for a STOL aircraft. Consider the Augmnentor Wing
data on Figures 5.2-2 and 5.2-3 as an example. The Figure 5.2-2 trimo
REV SYM BIE~A'C j N. D6-h0hO9
PAGE 1ch
I

curves show that angle of attack must be reduced in order to
maintain n, = 1 g in a climb at constant speed. The angle of at;t ., :
reduction is necessary to compensate for the increased biowinx. that
results when thrust is advanced to climb. The change in 0 can be
calculated from 9 = ,+ d , and is shown on Figure 5.2-3. It is
seen that the unaugmented aircraft must be rotated nose down as it
climbs, which is opposite from conventional airplanes. Control
Technique -l would be virtually impossible to use in this situation.
Typical pilot comments on familiarization runs were "something is
backwards", "are you sure the simulation is working right", etc.;
even though the pilots had prior STOL experience. These comnents
were not heard during evaluations of the EBF, which Figure 5.2-4
shows could change I at constant 9.
In the current study, the A Q/X ratio was controlled by modulating
wing flaps. The A Q@/Al .75 limit is based on the results shown
on Figure 5.2-5. At lower values, the pilot complained of having
"insufficient lead information". The column step responses on
Figure 5.2-12 show that pitch rate lagged load factor in the
systems tested (due to the DLC mechanization) and this was
probably more responsible for the adverse comments than was the
steady state AQ/;&. It is likely that AQ/%X ratios approaching
zero can be successfully used. Since AQ /~S = 1 for conventional
aircraft, it was decided to specify A Q/tb a .75 until a lower
limit can be supported by test data.
This is considered to be an important area for further study as ito
impacts on the control power requirements of Section 5.3.1.3.
0JMl;G |N .o .D6-40409REV SYM BiWZC NO.6
IPAGE 102

NOTEl
I. AMES SIMULATION DATA
Z. W/S = 78
C 5
AUGMENTOR W IN 1 G4 ENGINES, %FLAP = 700 '
C..G. .344 E -
,y -- DEG
-4---2 -0-
-- 4 2-* *4-
--,
-a--. lo
30i
- ~~~~~.- ... , -. .-. J -....... 1 .... ..... .. .... .... ; '.
'-'~~ ~~~ '. t ',-- '.:-- ":" : "~"
DEG:' : :
-to
';.:i ~.-.-...·.- .-- ~..... .~.....
' ' ' i ..~L.. :-.":'--,i..:: .- -.-.:^.. '~~..
10
-4.
- : . .. ... '.
.t' ,I ~: -- ::--- : _I . .1
-. ' . . " ~.
.4- ~ ~ ~ r` .:. .~.- ..
I0~~
.· . ... 60 80 1001.'. Ve..-.... ... K eA S
'~~~ ~~~~~~~~~~~i-: . ... .... ; ":"" I. .. .i ...r. ' '"
120 140 160
CALC ALLISON 1021.71 R.VISED DATE
¢.~~~~~~~~~~~~~~~~~~~~~ D6-40MoCHEC _ K _ TRIM DATA AT CONSTANT 6-404
AP"R _______ _ I _ _FIC_ II '1_ 5. -APRt
PAGEI I I 11 THE BOEING COMPANY c
oI 4100 3240 K*F ALlAN[EN tVSL
a~~DEG.
I ---------------------
I
t -
I v
2 I
I
C., = + Z?

CONSTANT SPEEOVS 7'" REL/TiONS5HIP
a
-10fOr- DE
/
CONSTANTV vs5 r
5
'' 0
-I .
.; '." .- 5
- ... .: -0
-15
I,- i .~· ~t ~~
t-·-
! "r'~' x Wo~ I
/ 4.-- DE&
/~ ~ ...-. 1V-2
THRU&TRELTIONS/'IP
P 6 01
60 -\ 70 80 90 100 110 120
Ve KEAS
Wa_
-\ \ .
Cc. W~~~~~~~~~~~~~~~~~~~~0'
"' \ '
i '~~~~~~~~~'
·'.i...: -; -. .,I :-l.-.~ ...- : - · .·.. _ ._..
L t~f' TRIM DA TA v-404
I ~~AUGMENTOR W1INr.' FIG. 5.2-
7
3
rTHE 3O Fi'%. ~ ..' ,, I ,
.0' '.I . k- ; - 7
-T---- -Q 69
:11
___J !A: Q i

CONSTANT SPEED i0 VS r RELATIOISHIP I
4-10 D.-DCT
2
II'
-/0 -8-6 -4 -2 0 2
.'"-DEG /
V Y5 RELATIONSHIP
5-.......... 2.: ......~: .................- ..... · .....
rh·DEG I .. ·.:.::.-::~~i.~ ., . 1.. : i~.'^.: .. .:...:.,:... --...- '.-.*...-: ~,..DE&
60 '.. 7 \ 80 90 10 110o"" ' '"' ' ' Ve" KEA.S
4%
-10
-15
~~ ~~L~~~lSOJ ~~~T I TRM P A T A P- 6-4040?EXTERNAILY BLOWN FLAP
/ y'~~3
:__'L7-- .... 2. 52-4
L 'zz~iizl~ THc- E . K. .10
-r.... .....
.-- C~~ .. :. ~....... ..-.. ..._..:.~I_ T LI 'I - - -... r·~ -_ ._ 1 .: _·._...............
;~~ `; ''LL .,'or~ !. ·DC )1-' .· -;I
: 'I5...l... . .. ........... LYBLWN LA~~n~.... · - · :..: i.-
F ,v..:- i l~~~$: 1.6' i c,:'- c - T. c"!r~ I j q~· 1
;. ... .+ .. I,~,-

PI LOTRATINC
~~~~~~.. '-. . ;
. .
..... : : .'_~: _ '.
ImPROVEM~~~~rU: : .,-r...~. 4" ',''"
:~~~~~~-- ' ' ." i':: :. .. .... :: .:-;. ' ! . ..
~O.· .5 ... 0 ... 2.0
· ~ -- '·-·:- '- " i'.' ',--·~ ' '- ' ----
'"'E: ...... ":'S "~::'~ :i!." ...... T1N AT....... ~' : .~
i .:_1. I. :-:----. 2.~ APPOATOCHN QL LANhNTA ; i~e. 5'O ~UWY·~~~~~~~~~~~~~- · TL\ -
· ...--i...: ;;..i. 4. :::AMETEe5 VAP--ED B," I',E:NS OF FLA~P · ' BLOWING MODULATION
· : ~.:..! . ]....:''~, P-.ESPONSE TIME ~,ls'O~..lE. SHOWhl ON. FIGS.5:?J.~' ~5.'z-1
.... : t .. , · t."t'":
CALc AlL15 N I vec 'I1j REVISED DATE EFFECT OF l; J D6()/40c"IXX '-C-n. D.~~~~~~~~~~~6-o4040
APR _ _ Foa CoomrP6L rcctiGueu-ll r k7.5 -
APR PAOF_________ I ~ Ij I~~pAj THE BOEING COMPANY 0THE BOEING COMPANY ' 1.09
DI .4100 3240 Alv LUmAN FtC E- !
I

0
Ag//. ' - Control Teclinioue a:
Whlen using this control tecnmiaue, the pilot associated 0 more
closely with speed than with Y . Conseauenrtly, negative values of
bl/hA Yappear to be satisfactory for control on the glide slore.
However, for abrupt transient maneuvers, such as the flare, moment-
ary increase in 9 should not cause a reduction in .
The change in 0 associated with flight path changes should not
cause the pilot to lose signt of the runway, cause passenger
apprehension, or exceed a geometry limit during touchdown.
D. t. Q/ A V - Control Technioue #1
Normally, a conventional airplane rotates nose up (+) as speed is
reduced (-) at constant , so &AG//V < 0. Figure 5.2-2 shows
this was not the case for the unaunented Augmentor Wing con--
figuration, in that there was a slight reversal in the 0 vs V
relationship at V - 95 knots. This reversal resulted from non-
linear blowing effects on the aerodynamics.
The SAS designed for use with Control Techinque i#1 maintained a
negative AQ/AV. Since the pilot is associating 0 with d-control
more than with speed-control, zero or positive values of &9//V
are probably acceptable. However, negative values are very desirable
during visual approaches as a warning that speed is changing.
1/ A V - Control Technioue ~#2
With this control technique, the pilot is using 9 changes to produce
0 speed changes. A nose-up rotation is used to obtain the longitudinal0
force unbalance necessary to initiate a deceleration. If the
0 > 80/ V criteria is not satisfied, the pilot would have to nose up
REV SYM dE7"A '" No. D6-40l0 9 _REV SYM IIPAGE ILU

to initiate the speed reduction, and then nose do-rm in order to
remain in trim when the thrust is adjusted to maintain the glide
rath. The aircraft would be on the "back side of the 9 vs V c!: e"
so to speak.
The further constraint AG/lV>-.o deg/knot was taken from Para.
3.2.1.1 of MIL-F-83300. The intent is to insure that excessive
attitude changes will not be required to make small speed changes.
E. Effective Thrust Vector Angle,1 T
Aerodynamic and thrust reactions are normally treated as separate
terms when analyzing airplanes. This approach is virtually Lm-
possible with some powered-lift STOL configurations, due to the
powerful effects of blowing.
Due to the inseparable nature of the aerodynamic and thrust
effects, an' extremely useful tool for analysing a STOL aircraft
is a plot of the total forces normal and parallel to the remote
velocity vector. Figure 5.2-6 is an example of such a plot, where
the "lift" and "drag" coefficients contain the usual aerodynamic
lift and drag terms, plus all propulsion effects.
If such a plot were made for a conventional jet airplane, it
would look like a family of drag polars with CD[N shifted as a
function of thrust setting. Note the following:
o lines of constant X can be drawn through the origin.
Hence, the maximum climb and descent angles can be
2 determined.o00V
o
REVSYM YE |NO. D6-40L409
IPA^E 111
-r

o the approximate trim angle-of-attack and thrust setting
is determined by the intersection of the constant t line
.4with .*'c quircl. tdr+Ir C (t-:act data wculd require also
trimming the pitching moment).
o the initial response to a thrust change can be determ3ined
from the slope of a constant 04 line through the trim point.
The direction of the initial response to a thrust change has been
referred to as the effective thrust vector angle, T. The effective
thrust vector orientation, for a thrust increase, has been indicated
on Figure 5.2-6. For this configuration (AuLnentor-wJing) a thrust
increase always produces predominantly an upward acceleration. At
the approach speed (80 knots) a thrust increase also produces a
slight forward acceleration, with the forward component increasing
as speed is decreased. As speed is increased above the approach
speed, the thrust vector begins inclrnir.g rearward.
Hence, a thrust application would cause the Augmentor Wing model to
climb and accelerate slightly at speeds below the approach speed;
whereas it would climb and decelerate (slightly) at speeds above the
approach speed. The pilots found the deceleration in response to a
thrust increase to be quite disconcerting; and speed control was a
prime factor in downgrading the Augmentor Wing in the SAS~j2 and
NO-SAS modes. On several occasions, the pilots were unable to
recover from a high-fast situation in time to land.
As indicated on Figure 5.2-1, the EBF model also had a predominantly
upward thrust vector orientation; but the orientation retained a
constant, slightly forward inclination for small speed changes
around the trim point. The pilots had much less trouble controlling
;OI speed.
REV SYM ~IF~F, NO. D6-40409
PAGE 112112

The differences in the Augmentor Wing and EBF characteristics re-
flect differences in the data base available for the simulation,
rather than fui~~o,: al dlffereaces in the powered-iift conicepts,
see Section 1.0.
The thrust vector orientation can be modified, if desired, by using
vectored thrust, flap modulation, etc. MhKile'IT is lno-nm to be a
very important parameter, the allowable limits are unknoicn. Factors
to be considered are discussed separately for the two control
techniques.
f T - Control Technique #1
T i 0 is typical for a conventional jet transport. A thrust in-
crease at constant attitude produces predominantly a for.ward accelera-
tion with very little vertical acceleration. Conseauently, thrust
can be used to produce an immediate speed change without an iLmm.ediate
effect on . If the pilot chooses to convert the thrust change into
rather than speed, he must change the aircraft attitude until the
thrust change is balanced by the change in the gravity vector.
If the thrust vector also has a vertical component, then a thrust
change will produce a change in nz (hence,X ) unless the aircraft is
rotated to a new angle-of-attack. The maximum upward inclination of
the thrust vector will then be determined by the acceptable limits
on the nz and 6 excursions associated with throttle inputs of themagnitude required for speed control. Both ride comfort and pilot
workload should be considered.
e The T 45' suggestion for Technique #1 is completely arbitrary.
The angle certainly must be less than 90° in order to produce a
forward acceleration. T1i13° is knomwn to be satisfactory from SST
REV SYM Z 7 N. D6-40!) PAGE 113

simulation experience. For4lT>4 5 ° the throttle gives more flight ,ath
response than speed response.
rtT - Control Tcch ... uc . 2 -T _
When contolling with Technique #2, a throttle input is used to initiate
a flight path change, and the effective thrust vector is tilt[2d, via
pitch attitude, to control speed. Consequently, a vertical thrust
vector orientation ('T = 900) is probably satisfactory with this
technique. Larger angles (T)>900) would be undesirable because of
the deceleration that would accompany a climb command. The lower limit
is unknown. However, the technique has been successfully used in con-
ventional aircraft when on the back side of the drag curve. In this
case,< T corresponds to i plus or minus the inclination of the engines
relative to the i( reference line. The suggested'T>13°O may be a
little on the high side, but provides for a conversion of 20- of the
thrust change directly into nz; (i.e., sin 13° = .2).
5.2.3 Control System Tested
This section does not contain any criteria; but describes the control
systems used in the current study. Representative response time histories are in-
cluded.
Two powered lift, configurations were flown:
o Augmentor wing
o Externally blown flap
Each was flown with no stability and control augmentation system (SAS) and
with two different concepts:
0 o SAS 11 - for use with Control Technique #1O0
o SAS #2 - for use with Control Technique #2
§ SAS #1 employs automatic flap and thrust modulation to force the STOL
o
REV SYM D DF~5,~ |No D' -4O4(9I PAGE 114~~.),^PAGE 114

aircraft to respond more or less like an airplane, whereas SAS #2 imnroved the
natural response of the STOL so as to improve controllability with Techniquc tr2.
Figure 5.2-"! gives a verbal comparisoun of the syste.m ested. Figures
5.2r-8 and 5.2-9 are simplified block diagra.ns of the two SAS concepts. Note
that both systems have attitude feedback and integration in the column commland
path.
Time responses are presented for the Augmentor Wing aircraft only.
Figure 5.2-10 compares the response to column and throttle inputs for the
two types of SAS. Note that:
1. For a column innut:
o
o
2. For
how St
SAS #1 produces a g change while holding speed, andAG/ZY =_ 1.
SAS #2 produces a speed change while holding X .
a throttle inout:
o SAS #2 produces a ~ change while holding speed.
~A/ '2 -.5 (non-linear, depends on trim data, see Fig. 5.2-3).
o SAS #1 produces a speed change while holding X.
The blowing thrust ( ;FhB) and auxiliary flap (GAIX) time histories show
AS i#1l used these controls to:
o quicken the nz response. Feed-forward paths from the column were used
to command an immediate thrust increase and flap extension for an aft
column step. These combined DLC effects were greater than the elevato2
download, so there was no initial nz reversal.
o maintain AQ/Al = 1. Following the initial flap extension, feedbacks
were used to retract the flaps as the maneuver progressed; thereby
compensating for the increased lift which resulted from the increased
thrust. The steady state thrust increase was, of course, required to
hold speed as was increased.
Both of the systems were experimental in nature, and neLther was optimized.
C, 3 REV SYM _a'_'_rs , N oi),D,-40409
IPAGE 115
P.
a
S.I,
0To
r.
..
0oo
a /
r -
IIIC
I

AUG TA-Nova R Wl \4 E _GINES, SF = 700
''' ' 8zsS- C 9
4/
25'
20
Svmeol..
0
T\ ZeLT' V ECTO.,,
-0.2 0 0.2 0.4 0.6
': '" ". , "' ~;'IP o'I', i.o-. ,
t r~~DorA4 L
0.8 1.0
NOTES:.D ~ C. CL INCLUME. A LL AEODY'NAM.I C ANb TA?-RU&T
FO[RCES IN STAB LTY AX-ES
. CTAMN. Y =--C/CL
rI i __ _. ·r
2 , - ........ ._ . . . ./' rsJ Li' / e_
TOTAL FORCE DA'TAt D6 -40409
INCLUDING TRUST -__AC.'.TON
..;' : '. .. ' ..116
7
E:CL
'rCoAL
I
5'
sPreeo'go AcfrTrE,
s CI .N0TS
0 hlcTS
1.2
I ; -.1
. .. ........
.. . ....... ...........
.~~~~~~. .';.... .... .. ... ...
I ....
i..-

C)
tC) o 3i
Or>
,0
c73 tq
.) 0)0
:=, :, ~
.,) o©
O
0s
r H
rQ t
;-I-'
X' >- i
' c..
O3 ~
·r.{ C-C\
0c1
o4.)
*r1 e)
tn -~
rS'p
·r
4-'
;ci-4
÷O
C
*rl
0rJo
o o
00
63 ,u','O
t) .4 ,'
h--..,
O
C, C.)~
o 0
· =
: .i-Ir-J
6 ci s
-r:
O n
gU
ri
0 0
0
oq~:44-'g.,
r4
·rlhK
L
~
C' rj
'J 0
· i 0r
*H O
C' ·i-
·ri O
! ).:4
O
r4
C_ r1
*rHO
*rI c;i
tor:;4
.:?.
C'){::
-,_'--"
p~
b.3
0 .rt
JR -,o
S-ic
C 0
iLJ;
-,I ,-_
2-'i ·
-o
(e C
Q
,..-H ~t.1 _,"i
H,=
3i ri
.4C)
*ri
0 O
>
C)
-D O
h-I
U
cr4.
C)
U)
to
O
.)
_-4t
ri
''; 1r
i-I-0
0 0
0
ri_
0'! cdu0cz
,0Ci
4 'C)
r-t C OU
_ *r
r-t .~
* C
)
r-l ri
rt 4
06 0
,4
Si
f- _
4 d
0 *rH
,1 CC)
.,:! ,-)
d
+ O
*rl
c) .
n 0r
r-'H
S
U)
C -
C_ et3
r_ cl:
'H
.'.~ ~
O
-.iP
r4 -C
0Fi-
>
O
Q
ri
00
h.
to 0
C) -C
C
cH)
2E-4
I .~
-o
, -0
,%)
4-P
"' Q
r. O
CD ':
°
-C
.
0 0
0
:, .r-i
4 rl
I r-
V
I) -
I o
C.
a c2>l
4S
;) __ C
0
N
0 ;
ENR 11
2" V
RV
ISO
DArE >
m
'O
O
O
D
CH
EC
K AP
R(
0 h
Or__
: N
_U
1 _: t _l __O
__
APRLU
AbO
3
Fi(
5,- 7
AP
I1
-
0.~ ..
Q17-
~~
'lec' 0~~//a7
.11-0E
JG1:'&
2-409
r."tLf-,
o1
-H ._
-r
H
ur-t
CrI-.I
Ei
C;
r-IH
*rt
0 0
>i
0
r P
H
00
C;
t.4 t'
C)
-tC=
-4 1
O2
H
2
0-I dcS
t
0 ?-
I
0 1017-
7Ji e
-04
7

pilot's.in, , .
£COL
feed-. 'ck< co trl i C l
II.
. I ..
II.
I
( + I
I .
+ I &G3,-I' II_
I
I!
;' %; t
] l- ~~~~I
I
I
I
. I'
: t
I
I
II
II
I
?qEt. I
J I ~I__-i
SC
; _ _ r _ _ _ - _r
I
I
:
I
l~~~~I m ¶ Ti-l C.
, .' ..
. . .
I. TO SE uSEIb wrIT
II I _ __I
C.OTONF-OL TEC!--NIGQUE I
2. FLAPS MODULATED Fe Z.L.C., TO C.ONT-OL - /X
AND TO CHANGE EFFECT\VE THRUST VECTOZ OD9_ENTATIC,
01
C)
I
.";
NOTE :
EN6R. RAVAC7-O # VISLO0 DA' E . 1_ 6-40409CHECK C A CS tf '
PR _ 'Fl, 5o. Z - 8APR
-_I _I - 117E: - "i5Mi ... PPb 11i 3
- An7
s e n s(',.
IIII!
/,

-feed - backI sensors
IIIIIII I,-.- I
c o n t r t.I
' I
I
II
o U t pu t
IIIIIi
iIIII!IIII
I
IIII
II
I III I1I.I
0
-I
III
III
III
IIII
-I
NOews: i. TO SE USED LANT CONTROL TECAN1QUE 2
- 2. NO FLAP MO0ULATION
pilot'sinputs
be
S'L
ENL. G r .. p l.out 1 fEVISED I DAE. P6- 4 0 ?|CHECK
APR
APR_ ff,61W=Aey~dfA ; , PAse 119
II
1.+
8 CL

..... ... .... ... .I : .I ...
I" :I , .....
I .I
I
i il. .a i
i --, - i:. 6v -v
1,- '. , , .:: / S
'f .-.·i ,
tI:. ;i.q 001 i]
; :;:. · -::[o 3as/6ep] .
· ,, ..-- ..... 1 k /
' ' i,, 9
.. .: [6ap] ` s ap
OL ~' O
_1' _ ,I ..· ... '~~~~ ·· ~r· ····· r~ .,/,,r
l ., . , .paylJ] ~~~.- S > 'i''
LI _ _ �I
i I I
Di H ., - _V'a-'--C-J
_ _ , .
ItIC:-oz-b
' LL°- -cr .0 i-.n
~:x.. --of -o a
[6ap] xnv .O ,Z:ol i O j
;O~~. /Zj ~~~~ ooqlo
>o
.-f
=I=
t ,
J
ID
t
60
i'
I-.
>o
t
t-iLo I
,O
' 1~
-OZ-
.-0 I~'-.' .., -::
0 :,'. -:, ":.~' ~. : 1:/
ro;.: :,.
..: 0' -OZ-
_ ..' :1
0l
: ....o ,f A --~'~
z
JU % %
_ L, _ _ Sl OlI
unata0 X
Ct,
cn {.__L",
U)
Wcl (a
-
a
o
O
tL
z ' S l l-
-OIL L :, .
0
L1I '
hI
aioZ ._J
I :z
, -
I
II:
C:1 , I I I
...~~~~~~~~~~~. ... "-:' .. ... ., I..... 1 , ... , . I .
* kas/] I
I
.I
I.
i .
.1 4 .. .
I .. ..
i
i , .
..:
I ~. .
-O'N__ 1I
'I.
.IZUIt .-.I
I
.' ,1 1.
,,x V<o ,1'
z I
IDZO0
B (./ I-
gLL
(zn ,a. r3.. C-)
owdo o1,ol O :
Iv
*
St-LQL 's.Oiz
,Ja:u
LIJ
0
LLJ51
'. ...... f I
.i -- -i -TT-- . -- --- ------ -7~:.-: .. .. ' ' ...~ .........Z wSS/
,' i , , _ H [SiS7 w",
[SM] AV
r-TO'L-S
I
0 o s; , Ol iI * = sw. s / ~~~I~~~~~c' ~ ~ ~ ?
Av
, . 1 a: ,o S
Zr~ ~~[6p r0l~~~~[a
* _._ _ O!`
:* *. .* ~~?0 sL ii 9 OL
..OOL'
-l
~~~~~~~~~~~~.,,: I' -sj
10
, .
',:=.'-'-_,' IM P.) ' .,5 to ),r
_ ~ ~~~ 57'S lle svzpLniI
11 I c L:.
,. ' .' *'..
t .i_r. ... -.
.u.~' ';
[....Oi..,CP .
."i- '
, '
j;..
0L
C 3S9
CIu
f,..1-
/4 I
[6ap] 83l G.
#tt
[3as/6ap]
v- C
.V :
rncAn/Fianl
Opi
-0
-:- O-i9V-oZ
O:
I'Loz:i E 0
-l ' .
;
o O
· .i' ~-"-
O0· -----~--'--_
O;, f2# SS)
.....
-S;-
-O
-O
L ,JAVi :1. .:..' S"
_
[6ap] A Ol
O L1 [6ap] ovr. I
t6aapJ e r -u, ~s~~~ iO
I 9
:[=U!] o103 Z__. .~. .. ; I° ., ..
v ft
)es] 9L 0 9 o -3a-] GL' ' ' ' 0 -,-J .....
', _ .OZ ,
*, ,;::..,,. i ..,. ' ' : ° .,. .." :
In' ldNI d31S 31ilO Hl lndNINa Nhdn-o0_ -..,

The systems were quite useful for making parametric variations in control
characteristics. Due to the limited time available, very few of those variaticos
ccts,.
be tested and most were concentrated, on SAS Hl. The most sigonificarL na-
metric variations were:
°o nz, the load factor response time constant. Within this doe;um:cnt,
* nz is defined as the time elapsed from the initiation of tthe control
input until nz reaches 63% of the first ek magnitude. Figure 5.2-11
compares responses for the quickest (Cnz ` .6 sec) and most
sluggish (Qtnzt 2.0 sec) values tested. The variations were achieved
primarily by changing the feed forward gains from the column to thrust
and flaps. The sluggish response was satisfactory for-glide slope
control, but was definitely unacceptable for landing on a short run-
way from a steep glide slope. The quick response was satisfactory
for approach and landing.
o AQ/AY, previously defined and discussed in Paragraph 5.3.2.
Figure 5.2-12 compares a response with A&/A j = 1.4 to the two
G0/I&= 1 responses previously shown on Figure 5.2-11. Values of
AsQ// = 0.5, 1.0, and 1.4 were tested by varying the gains to the
auxiliary flaps. The pilot favored the haQ/a= 1.4 value for glide
slope and flare controllability; but remarked that it produced a
cockpit vision problem when large flight path changes (including
flare) were made, The A©/A = .5 configuration was deficient in
that there was insufficient a lead information for control.
O.
o0
,O'~='j~'~ ,~o. D6-40409REV SYM Dt'X9Yv5 No. D6-40409 +PAGE 121

II'' .
t .: .: ,; .
.' ....'.· ' ' ... .
: .'-i :. "., i :
.~~~~~~~~~ .-; ' ... .
I ~ ~~~~~~ ' .' , ;2 .' ' :. · ',! ' '. :.; .,
|! ::':.t : t -' ; ~'.'
t , .;
;i
......
'..; : ; .., ..,":
-. !
,.tr-: :-
.* 7, .1 '- i l
S ' :' : ,
X ''''-'.. ; ;- .,. .,- ',
) ....-j,: , f
,. · .-
i;
, .,
.: ' '
: , ', ,,,; , ...... .. ,IiI ,, j ._i ...
* j
:- $,,^
Oas
_-~- -. ,,
i3 ...
tAf .
T
i, ..
t.:,i , II
C3,1'
0'1· : ' .
* -As ",:4;2 ~~~~~~~~~~~~~~.: Zvxev
I I
'6.O
a ......!/
IasI
I I I
OL
01 .I I .I
0 AV
O, -0 .WI--
9y.v
1
-'0.l~a
-o
-o
sl
-OL , 0 L i
0 0
.
od
WZL7
Fin 45,Z VI
[;E'/'
os~ .
..
-0 I, 1z -
ZNV- i'
OL
0
OZ.I
DO -0
L 6ap
-0
Das oz 01 CIt ,-O-r
I
Ol 0
eV 9 6Bap
), /-0
-96ap
'NI L J0 3DS1ld NWnVlo 33SDS OL S3SNOdS3l.;.. ; (SdVIj\ nlV 4!M) I1 S'S
_.
Q 6
tiw
;zo
00
v I|
L:ALU
i
Is.
tL
2
2 u~ '981
Th
NICIO0 3NI-
tSC',
Z
OUZ
zI
a- 4
0C-E
utCDzLU
0
I--
000
I?
0
o! 0
g
0N
a 44i
I
L-
I.
47-
.;- ...I a- .._ -
_ ._I I I [ I" I ... I' I
OZ ..
I
t
11 ;
i. II I . i, .. .7., ..j ..

·'' ; · t~~~~ " I .i. : " ·: .1
-'a '"..·........... ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ 4 4r S:'i ..... -"-"'~.. , __ ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~''· .......~" .' :: :..: r' ' ;'l.~. 'i , ' '_ %% ,'. : , · I~~~~~~~~'r :' .~ !--:'i ::":i.1i
:.~~~~~~~~~~~~-:.-...- 11 0 i~' 01, .. :.-.-. 0 V , 3aS Z O ...i.i ' ' ' .i. -:· .:) :
· ~~ : " .:.i~ ~~~~·. .· i. .-. :.1. _. i'-"' ' : " : '. I ' -,' ' ....!L.1: .
'~ ' ' I'I .' ...... _i
:~~ ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ *. ' ' '' ,· : j....'~~~~~~~~~~,..· ...... .... .... .....
·~~)·._. .. ...........' ' , ~"~" ': %l .!···· : ': ... ;· .'1·
J,,1 ' , -.~.' ,'~-". Z ' : 0'1 I : .I ....l''
;- · .- · (· ·- lot·-·rr :I ..:.:..~~~· .1
; '~ : ·'''...· : .. .. ~:,'". :.~~~~~~~~~~~~~~~~~~~~ ~ ~~~~~~~~~~~~~~ .......... !~ ·· J,':"-~" .....t"-:"_____.___~____~~~~~~~~~~~ -· -:""
_ _-- ~, ~~I., ',· :. .: I. : ....' ~~~~~ ~ ~~~ ~~~~~~~~~~~~~~~~~~ .... :· ·:
.. ; ..:.... : : ·i~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ ! :,:::'ii': t'-i: ',:.:' '.,: .' ' ,cr ,
; ~~~~~~~~~~~~~~~~~:.,- ......· , .. ..~~~~~~~~~~~~~~~~~' ·.: .. l ..-.....' . ··~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ..i..,: I. F:1'
~..~~ ' !'~: !:": ··!~ ~ ~ ~~~~~~~~~~~~~ i .1·..; · I.,'V.,r B ~~~~~· ' 1 I: '
I~ ~ ~ ~~! , --1 1~~~~~~ ' ': :',~ .,J:,............ · ''" ' .. ' k' : ': " '""..;:'t.. :.i: .: r ·. : ' ' : ' 'i ' " ··I ~ t'%. ... /i·.:1' :! L:'.'": " ~ : '~ ' -" ~..
i·~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~, ': ii'~
"~~~~~~~i '~ ; .. I : · : i 1~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~::. .. i-.::.::: .L. I ~~~~~ ~ ~ ~~~~~~~' ~ ''' I :
! .OZ ·: ~ i' o I·. ·,~ ., .0::,,: i;: I' d!i:,"! : .':'; ! 1: : ' ' -" ~ /: ' :~~~~~~~~~~~~~~~~~~~~~~~: · : ' -· '" :-1: ' · ·...":... .... ..
r ~~~: ....:o.I-. : :: I- :-::"I ;: !.. ; .·:: ,.:1 II .:,1 ·~~~~~~~~~~~~~ ~.,: ~. :.;; :. : :~1.....,,, ,_:~~~ ,:i ._.. ,' ·f-~~~~~~~--·"r--·--~~~~~~~~~~~~~~~ ..· ', ' '~.' (, · '"1:? ' ~" '.- ' W
t~~ " ~ ,~. -: :~ ,.:.';1 !.:l:-.-' :~~ ~ :)a .:~~~ ~ O ~ " L.. ::..:..0': -:.L:. t ·~~~~~~~~~~~~~:I
~~~~~~~~~~~~~~~~~~~~~~~~~:-.i i I~ ~~~~~~~~~ I .I I ';ai,i ' 1 I ' ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~~~-.... :- ..-.. .-'''' , .: 1.:; .: ,· ·:: ...1........ -,:, .... ,·~ ~~~~~~ ,,/,:., 1-,: ,:4 -i::;!~
: : ".,': '; .i I .~~ ~ , : tO!`':-. r.·. .:-i- , .:
~~~~~~~~~....: ... . ...........i.. .f ·~--, ,· .....I ~~ ~~. 'ri:· i. ::~~~i; :~~~~~~~~~~~~~~~~~~~~, , ,.· :~,''t ,; ,I......!: .:l3e'l .... ... .~ . I . i..: :.:'.. , ,
Ii! :'I f-r ...... ~ : ........ i i.~~~~~~~~~~~~~~~~ ' · · ..'" ...: .""
~°~~~~~~~~~~~~~~~~~~~~~~~~~~~ ' ~~iI ' ' ;"'i··················Ij '."I :7 l.,-,,vp.,'l '~~~I ·! :I,
'T "'' ' '' .... '~~~~~~~~~~~~~~~~~~~~' .) ··-' , i..i
:-'. ::j.;:il ;'.dP~i I ...... '. ~~~~~~~~~~~~~~~~'"....'..:· :''·t I ' " · ;:33:: ' f:~~~~~~~~ ..... ...........: ~~~~~~~~~~~~~~~~I· ··· '~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
·~~ ....t... ,_- !·~~~~:, .....:.h. i:· , -. : '' t .. ; .' ': t ..
t;~ ~ ~~~, , ,: ,. : ._.~_,~.-_ i.,. :r:J:.J :. :.... �... .. .I
·~· ...· ' ~' ' , I... ... ''' ' ' .
i-···- ·· r I i:~~~i~~t ;jI~11 t: -L.; :--t:-~.,--
..~ '·: i::" '..... .:'~ 91]O23 ,: ,.'.-: . · ' , ' ' '~~~; · i .~'!~~~~~~~~~~~~I: '.; ; .i~~~~...'. ...':.1,''. /-' ..' :. t.:t:.=:-
,. '-...It" ;' I.~,t ".' .:'I i· .":~ '[ : ..... :~ ............... " ~~~~~~~~~~~~~~~i' !' ----i:''..
.. .~' ,. :., ,, ,~~~..1.: F: : -i -r,..']
r':"I-'o1 :":: ": :" ~~~~~~~~~~~~~~·~~~~~~~~~~~~~ .' O I I J
i~~ ~ ~~~~~ ~~~~~~~~~~~~~~ : i33 i ~ ' Ii
I' " .'. "' 1..,.: :".':,;~''/"-^:..- ., ..11.. ..-::-%,/t , ~ ~ ~ ~ ~ ~ '' .~ .· '~~. ~ '. ","~:, :t'V'"'/'~,~" ..:
J~ ~ -' 'J I j J I
i -- J ....
I...
. .
,' ...... ..... .
.,
I _.__ ..
W6i

5.3 Pitch Control
5.3.1 Pitch Control Porer
Criteria: Tbc pitch control po-rer av.il-b!le frowm a ma-irm column. inrput
-shall meet the most severe of the requirements stated in Sections 5.3.1.1,
5.3.1.2, or 5.3.1.3. The static balance requirements (5.3.1.1 and 5.3.1.2) and
maneuvering reauirements are not additive. llo-ever, if the airplane is un-
stable wit.i respect to angle of attack changes, it must be demonstrated that
sufficient control power is installed to provide a restoring moment at the
maximum angle of attack that could be reasonably expected during abusive type
maneuvers. In this case, there would be a stability augmentation control
power requirement in addition to the static balance requirement.
Discussion: Regardless of the augmentation system or the pilot control
technique employed, pitch control power is required to assure a static balance
of the pitching moments resulting from expected perturbations from the trim
point. These requirements are stated in Sections 5.3.1.1 and 5.3.1.2; and
include the moments resulting from gusts.
In addition to the static balance requirements, there are pitch control
requirements which are dependent on the control technique employed; i.e.,
whether Q is used to control X or V. These requirements are stated in
Section 5.3.1.3.
The static balance and control requirements are specified as being non-
additive because the static balance requirements include the most severe up-
setting moments that could reasonably be expected in still air, combined with
the maximum upsetting moment expected in turbulence. Since reaek gusts are of
short duration, it is considered unreasonable to apply maneuvering require-
6 ments in addition to the requirements for static balance in turbulence.0
If the unau-nented airfrear2 does not have a stable static margin, the
e control power requirements will probably have to be increased in order to
REV SYM i NO D6-4040 PAGE 124
. r

preclude uncontrollable pitch-up during abusive maneuvers such as collision
avoidance.
5.3.1..1 ;.tatic Balance out Oi' Ground Efi'ects
Criteria: %With the trim set for approach, the pitch control must be able
to provide a static balance, out of ground effects-, of the pitching moments
resulting from any allowable thrust change comibined with speed changes in the
range from stall warning speed up to VApp + 15 kts, combined with a step
gust from the most critical direction with a velocity of three times the I's
velocity of the design turbulence (3c gust), combined with either of the
followring:
o any allozoable configuration change, or
o turns and pull-ups to stall warning.
When interpreting this requirement, conditions such as thrust reduction
or flap retraction at VM]]{ need not be considered, as these are not "allow.able"
inputs. Allowable inputs are gear and flap retraction for go-around, etc.
Discussion: Configuration changes are not combined with the turns or
pull-ups because configuration changes are normally made in 1 g flight, and the
speed variations required should assure an adequate control margin for small
load factor disturbances.
Maneuvers to stall warning are specified rather than to "stall"
(d liax, etc.) because it is unlikely that a 3o- gust vrould be encountered in
conjunction with a maneuver outside of the normal flight envelope.
5.3.1.2 Static Balance in Ground Effect
With trim set for approach, the pitch control must be able to provide a
static balance, in the most adverse ground effect, of the pitching moments
resulting from the most adverse combination of:
o angles of attack up to d = Amx' and down to the lesser of ~OApproach
or Ground Roll
35zE-Ofi;z NO. DO-401o09
PAGE 125
a11I0
c
0r,0
so
so
o
- o
o
e
p.
REV SYM +

0
o speeds in the rar.ce of VI;in to 1.1 VApp
o Thrust in the range from flight-idle to go-around thrust
Di.s. i-,n: During a late flare, th.e iLct mar c:-trcl into the "stick
shaker" (I!,zarrn) in order to prevent a hard landing. 'The reqiirerment for a
static balance of pitching mozments to lax assures an excess of control rpoer
at "sticl. shakear". Control carability to the "geometry lirit" was not specified
because the 0(yly reeuire;;nt is rore severe; i.e., w may exceedK'reauircn-ent i ror eee eGeometry LiLit
when the aircraft is descending during the flare.
5.3.1.3 Maneuvering
Criteria: With the aircraft trimmed for approach at approach speed, the
pitch acceleration resulting from a full aft colunn sten shall be within the
satisfactory region indicated in the sketch below.
SCTSFA4:TOe aY A ~. FC31E. ' ~~FOT" C.. N:L CV.IJ SE <
.E?_ Ni ',1,C, t.J VttE5
5AT- SACO Ro o 'e , .' Fo-C'E I 3 U S-'eC "TE~HN\Quz. ' / E --N E.
The nzand @' terms refer to the initial peak acceleration (at t r; 0)
resulting from a column step input. The %nz term includes the change in lift
resulting from actuation of the elevator and direct lift control (DLC) devices.
For an aircraft intended to be flared by means of colurn inputs only
0 (Control Technique l1), i must be adequate to provide a positive rate of climb
() increment within 0.8 seconds after an aft column step input of the
REV SYM DZA |NO. Do-40409PAGE 126

magnitude normally used for flare. The effects of DLC devices should be in-
cluded in deterlriningC the 9 requirement.
Reiisxa' le, of the conrcl -",- ....^ *..,g a ar'' -.es'' - -~ caability, it mst bse
nossible to achieve a 3 degree attitude chanrge lithin one second after a full
aft coltuWn step.
The 9 requirements apply with the aircraft trinmmred for symmr!etric flight,
but controlled into the most critical steady sideslip required for engine-out
or crosswind conditions.
The requirements should be satisfied in the most severe ground effects
encountered oat altitudes down to 1/2 of the nominal flare altitude.
Discussion: Pitch attitude changes wrill be required either to control
flight path (Technique i#l) or airspeed (Technique -':2). Reouirements for the two
techniques rwill be discussed separately.
Technioue l1 - One fundarental requirement for satisfactory flight
path control is the sink rate crossover time (ti), defined as the tire required
to achieve a positive changre in rate of clifob following an aft column step
input. For a conventional airplane with elevator control, the crossover time
is usually approximated from
For the more general cases of an aircraft with powered lift effects and DLC
surfaces, the CLK and the CL gc/Cmge terms can be modified to include these
effects. With a little mnaninulation the crossover time equations can be
solved in terms of the @ required to produce a desired t[1 as follows:
o .W .. fi {e/
0o
. where all DLC and blowing effects are included in theAnz and nz/m( terms.
REV SYM VA/ | N(O. )>-l.O^9 +1OPAGE 127

As discussed in 5.4.4, ti . .A sec. is desired. After decreasing tu by
the amount of anticipated control system lags, the required 9 can be computed
for. aqut-io .J. '3 oe a enl ·S is3- r O ti- e' for an elcc-at or,
which requires a positive G. If DLC is used, Anz n step could become
zero or positive. In this case, the AG 1 sec = 3 degree requirement would
apply.
The A 1 sec = 3 deg requirement is based on the following:
o Consistent with Table 2.1 of Reference 7 which recor-mends AdHi = .05
- .2 Pad/Sec1 for STOL and oj.ij = .1 = .4 Rad/Sec2 for hover,
o Necessa-ry in order for 9 to lead nz with the recommended nz response
time and Q/~ ratio. (See 5.2.2).
o Adeauate for flare. Some STOL aircraft may require large attitude
changes during the flare to arrest the sink rate and to avoid striking
the nose gear. The required 9 would depend on the configuration,
but 2 as 6 deg/sec 2 does not aprear unreasonable.
In the present study iwith a system that uses DLC to meet the crossover
time requirement, it was noted that a maximum pitch acceleration of 3 deg/sec2
was used by the pilot to flare in turbulence. However, an additional 9 in-
crement to account for speed deviation below approach speed is desirable.
Technicue i2 - WThnen 9 is used to control speed, rapid 9 response is re-
quired to achieve adequate speed response. In addition, it is necessary to
control the thrust/pitch interactions and to rotate in the flare. The e
requirements for STOL operation using this technique are expected to be sirilar
to the VTOL requirements of References 7 and 8.
The Reference 3 requirement for /A1 sec > 3 deg was used since this
format includes the effects of control system lags. Assuming no lags and ao ..
constant acceleration for the first second, 9 > 6 deg/sec2 would be required;
which is consistent with the .1 to .3 rad/sec2 requirement of Reference 7.
REV SYM NO. D6-4009
PA^E 128

During the current study, one configuration was flown (with Techniclue ;i,2 )
for which control power -<as -1iAited by the column/clevator gearing to
G;..jI1 5 dog/ '.1 Til- -cuz- *cd.? i W c -lu r wz t;eattzr: to ,old air-
speed ldurinr a flare in turbulence, arid felt the control nower was inadcouate.
Prolff " N o. D 1401409
P AG E 129+
oa
P,
0
0rr
0o
g
REV SYM

,r
5.3.2 Pitch Control Sensitivity
Criteria: Pitch control scnsitivity in terms of Q/ Col should meet the
rc remn,-t se. forth '.elw, witl the aircr-aft trif.d for .ap.rc.ach at the
approach speed.
Control Technique irl - Pitch control sernsitivity should be set to meet..
the Q requirements of 5.3.1.3 in combination with the nz/gCol renuirements of
5.4.3.1.
Control Technique 1i2 - 0/[ Col t 3 (deg/sec2 )/inch is required.
Discussion:
Control Techniique -"l - In a conventional unaugmented airplane, pitch
control sensitivity is determined by the column/elevator gearing. As discussed
in Reference 3, the relationship between / Col and nz/g Co for a second order
representation of a stable airplane is defined by the short period. frequency
(lTnsp) and the load factor response to Od (nz/d), i.e.,
. .. L
When augmentation systems are used, the response to control need not be
second-order; and the initial acceleration can be controlled independently of
the steady state load factor. Both the command paths and the feedback paths
may contain shaping functions. The nz/ Col requirements will establish the
steady state gains. Direct lift control and elevator gearing can then be
traded to meet the initial G/ Col requirement.
Control Technique ,-2 - The G/ICol requirements for STOL flight in this
mode are expected to be similar, but a little less severe than VTOL hover
requirements. As shown in Reference 8, longitudinal acceleration during hover0
o can be approximated from the change in inclination of the thrust vector; i.e.
0 '
REV SYM D N.e D6-40409
I PAGE 130

STOL aircraft operate at speeds well above hover, and a significant
longitudicnal force is also obtained frora tile change in aerodyna.mic drag
(CODd. i f). In addition, t,,o STCOL tasl norr-lly r.-.Je holr the. i
as oppozed to the VTOL requirement for quickly c:-a-i- airspee- in order to
translate or stop over a desired area. Consecuently, the Q/fCo' requiL .ncn
for STOL was chosen to be a little lower than the Reference 7 requirement for
VTOL, and to meet the minimnn control power requirement of 5.3.1.3 with about
a 2-inch colu=n deflection.*.
In the current study, Q/gCol sensitivities of 0.8 deg/sec2/inch and
3 deg/sec2/inch were tested with systems designed for control teclmique t2.
With the lower sensitivity, the pilot used full colurn (6 inches) when attemnt-
ing to hold airspeed during a flare in turbulence; and dowmrated the system
due to inadequate control poemr. With the higher sensitivity, attitude
response was considered satisfactory.
.~'f'-.,f'1=,. NO. Do-40409
PAGE 131
0
o
I
U
,0o
oo0
z
REV SYM -

5.3.3 Pitch Rate Response
Criteria: Pitch rate resnonse to a colurn step input should be general!-
ccloat ibic- Wit';l thi frleoaue±cy aid d'&aiig i'equii-ciients of the longitudinal
dynamic'steaoility criteria of Section 6.2, herein. However, it is not
necessary for the pitch rate response to be second order, provided it is
smooth and has no unusual characteristics that would detract from controllabili.ty
or passenger comfort. The response. shape sketched below is considered to
renresent a desirable response, and is presented as a guide.
Control Technioue -1 - For a wings-level pullur conducted at anDrox-
imately constant airspeed; and .ith nz/7 typical of CTOL trarsnorts at landing
approach, the pitch rate response to a column step should have the character-
istics indicated below:
- At S PEAY. C 2. SEC < tL .-r PA ePtvcH eAX _
1.0
0.5
SpeeE Lt- r'N 5-D -SpI-4s- ' .I CcL-Um4u ,,,, . ,S, ;-r~
5so0Y OVERSaOT
:t -'- SEC.
oDU" 40409
PAGE
132+-
a
er0o
f.
-o
REV SYM

o
Control Technaaue ;- - The pitch rate response to a column step input
should be similar to the response shown above for Technique #1, except:
o the recuirement applies with sneer. varrinP
o the initial Q and QSS requirements do not apply.
Discussion: Unlike the case of a fighter gunnery task where precise
attitude control is important, per se, attitude control during landing approach
is important only as it relates to the ability to control speed and flight path.
Consequently, the response must be quick enough to give good sink rate control
(Technique #il) or airspeed control (Techniaue #j2). Yet it must be sufficiently
smooth and predictable so that the pilot can put the nose approximately wmere
he wants it and keep it there while waiting to see if he gets the' desired
rate/speed response.
Pitch response criteria for airplanes are frequently defined in terms
of the frequency and danming of an equivalent second order system which
represents the pair of roots (real or complex) dominatirng the short term angle
of attack response. The equivalent second order system requirements of
Reference 8 have been prescribed in Section 6.2, herein, as dynamic stability
criteria for the response to external disturbances. However, there is no
reason to require the control response of an au nented aircraft to approximate
a second order response if a better response can be obtained by command
shaping. The design criteria used-for the Supersonic Transport control system
approached this problem by defining an allowable pitch rate response envelope
and a desired response shape for several flight conditions.
Control Technique '1 - The desired response shown for Technique #il is
similar to the SST low speed requirement, which was shown to be near optimum
for that vehicle by extensive fixed-base simulation studies. However, the
optimum shape is a function of several configuration-dependent variables, in-
cluding nz/DQ and the effective tail length. These two effects have been
REV SYM "AA' 1A MNO. D-40409 +PAGE
133

partially accounted for by prescribing an initial slope, Q, that will give a
satisfactory sink rate crossover time.
Contr,)L ocT'ni ,e . e -o .Since attitu.3e ch r.nres .re not recuired.to
initiate flight path cl-amges, the initial Q requirement to obtain the desiredc
h crossover time, and the relationship of Q to t do not apply. Hovever, a
fairly quick attitude change is required for good speed control.
Current Stuayj Results - The shane of the pitch rate response was
similar for both control system concepts tested. It can be seen from Figure
5.2-11 that the pitch rate response criteria recommended herein were not met
in that:
o the overshoot wras less than 50,
o with SAS A-1. the first peak of R-occurred prior to the first pea,
of Q (this was achieved through powerful DLC)
While the pilots felt the pitch response was generally satisfactory,
compliance with 'the criteria would probably have corrected two of the
reported deficiencies:
o more attitude "lead" information was desired for flight path
control with SAS 7#1
o attitude control was considered sluggish with SAS #2.
dEiW4 INo. D6-40409
PAGE
ro0
-1
I
2
C00I-00
0
REV SYM ,
I
134

w
5.4 Fliiht Path Control
5.24.1 Glide Siope Control Power
5.4.1.1 Incretmental lcornal Acceleratiorn
Criteria: The load factor available at stall rwarninS shall equal or exceed
the greater of the values showni below. The requirement applies at approach
speed, in free air, with trim set for approach, and rith a thrust setting not
exceeding the thrust required for constant speed in the maneuver.
nZplide slope 3 nzflnre ~- see 5.4.2nzglide slope nZflare
nzide slope >+ os g
where
Fax = .25 VApp " ~ required for = 3 °/sec turn rate @ V = 1.15 VApp
(Deg) (Knotts)
Discussion: The above criteria are similar to the vertical flight control
requirements of Reference 7, but differ in several respects. The nz require-
ments stated above refer to the capability at stall warning at the trimmed
thrust setting, rather than to the maximum nz available at maximum thrust.
This was done to assure that stall warning would not be encountered during
normal maneuvers at the power settings normally used in those maneuvers.
"Normal" maneuvers for landing approach are shallow turns and the landing
flare. The load factor increment required for turns was specified in terms
of the turn rate, so as to provide a rational variation of the nz requirement
as a function of approach speed, The choice of a standard 3 deg/sec turn rate
at speeds up to 1.15 VApp is arbitrary; but the resultant bank angles appear
reasonable. Note that the maximum required banLk angle is 30 degrees at a
120 knot approach speed, which is consistent with current CTOL operating
practice. During the current study, the pilots felt uncomfortable when the
bank angle exceeded 20° at 80 knots, which correlates exactly with the criteria.
REV SYM A NoD 40409
PAGE 135

*0
The arbitrary allowance of .1 g was added to the steady turn requirement
to account for typical perturbations about the nomninal valde.
in!Oike Reference 7, no distinction is made between be·
e nz rcsult'in
fro.I thrust and the nz due to c . It is felt that the basic reauirement is to
have sufficient nz capability, regardless of the means of obtainirng it; and
that a criteria presented in this marnner will be applicable to any configuration
from a pure airplane to a pure vectored-thrust machine.
5.4.1.2 Incremental Flight Path Angle
Criteria: Considering the design glide slope under no-wind conditions to
be the nominal flight path angle ( > ); the constant-speed glide slope modulatiot
capability shall not be less than the following:
Steeper: = - 2° @ VApp + 10 kts
Shallower: tE = Still Air + tLu Design Headwind
where: Still = the greater of:
o + 2 @ VAp -10 Kts
o 20 (P/aV) @ VApp
- in degreesV in knots
c~a ~'. ~ = ~x VwindDesign Headwrind. VA
Discussion: When approaching on the back side of the drag curve, the
ability to make glide slope corrections becomes a strong function of the speed
deviations and the slope of the N vs V curve. The NV= +2° criteria of
References 5 and 7 have been modified to account for +10 knot speed variations
from the approach speed.
This requirement was established by limiting flight-idle thrust and
maximum thrust, and requiring the pilot to recapture the glide slope from
high/fast and low/slow conditions. Glide slope deviations of 0.7 degrees,
combined with 10 knots speed deviations, were chosen arbitrarily. The pilot
REV SYM N I o. D6-40o4o09 PAGE
136
r

felt that deviatlions of this magnitude represented realistic worst cases ior
attempting to salv-ge a bad approach, provided recapture was initiated above
nn altit!ude of 500 feet.
The thrust lirmits tested are shown in Figure 5.4-1, along with the rilo-,
coMr.ments. These comments appeared to substantiate the 4H= ±2° requirement
if the j capability was measured at the limits of the speed deviations.
Figure 5.4-2 shows the thrust limits corresponding to the recomm-ended criteria.
These limits where then tested in turbulence (?.iS = 6.5 ft/sec) and in head-
winds and tailwinds with wind shear. The pilot flew a normal approach ieth no
intentional offsets. The limits were further verified by tracking a 10
steeper than normal glide slope on instruments to an altitude of 100 feet at a
speed 10 knots below approach speed; and then recovering from this situation
to flare and land on the runway.
A tailwind allowance was not added to the "steeper% " requirement
because the required descent capability may be a prime factor in selecting
the flight-idle thrust setting. It is desirable to keep flight idle as
high as possible on powered lift configurations in order to minimize the
likelihood of inadvertent stalls resulting from throttle abuse. The b= -2 °
requirement will handle expected tailwinds on a good approach at typical
STOL speeds. Failure to regain glide slope from a high/fast situation in a
tailwind will result in a go-around; but will not compromise safety.
The case of headwinds is entirely different in that headwrinds are the
rule rather than the exception, and the ability to regain glide slope from
a low/slow situation is mandatory for flight safety.
The requirement for a positive AX capability of at least 20 (bO/ V)
was based on a prior unpiloted response study of recovery from longitudinal
c gusts. The criteria are intended to provide a recovery capability comparable
to current CTOL transports. This requirement will probably set the positive
REV SYM _ Bi'AP | NO.Do D-40409
PAGE 137

4&capoability for very unstable valtes of Z[/3V whereas the Af= +20 rc-
quiremnent will preodcninate at raore stable values. For the configurations
tested in the current Rtid?.r nrnroxlte3.v the snme &spmaility resulted
from both criteria.
D"a"E/rAKM"° NO. D6-40409
IP AGE 138 +
0
0
P.0
P,
000
REV SYM
11I'I
I
L
c
IoP

LIPPEDR TH-Q%-T L M IT/k"T' SO ,"/o DF_.FIN IF~_LY i NADEOt. ATE
,lt::E..'TP,¢.LIST LI N1 IT AT G0'Y~ MArCiNAL FO~ LOWN-SLOV
'5 ~- 'i ·- -':
"=~'70`19 \0 ~i-s
·~~~~E
-:-
i~~~~:...
.......... :..-....·.....: : . .. ~: ~~~~~~~......·...: ....: ' ''-'
I . i ,. / _L0WER II ~~%I~QJ~ IRHG-r~
· .. .... :...: .. ~......:.
·. ...I !· ! S · i '
UL.AU.1L RCEISVD DATE\JALUN7TON QF GLI ' S~LOFE (-4040YCHECWFC IK CONI'(TOL \NITIA LIMITS ON
APR-HE BOEING COMPANY1PAGE
THE BOEING COMPANY 139DI 4100 3240 ALSAN(Ni DATL
DI 4100 3240 H~r. AIANtMt IgSL
II
.

THwzus Rsc;ur ·r FOc GCL1O SL.-e Con-,_cI - - -~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
FO- TIAIS C.6CAFIGUi-AT0140 TH.E SAME/ TRS~.%T IN. CAZE t'IS .EC' D TO MEET TAE A. =-A-Z T ' Z.O.A-- .EQ'OT.S
+-5
o
- s
-1I0
-- .'
MA'X. RATED THR.UST OET SAtOUL P._VIBE FO.1. Ly =. A: GEAOTe. OF 2 3 - AT VAt)-CI\
\ .- .~ -E F 30 'v ATBWIp
2. PLUS ALLOW/ANCE F CF 30 KNMr REAW-4INWI-
I
.- :~o ,... . .. ._ ;
I . . _. -
· .- 'C:,~ :X_,. . k .''
r777Ae---
c1~
s~~~~R~ANEE :L-C~AT It43L: (z o4
: ~a / ;'2 .., 'C' : - ' :
I~~~~~~~~~~~
.:: : : :, ..... ,~~~~~~~~ .4 "./' ·-.'
.. - . 01*'"J- :" ': i' :- '* ' "-'/ ... ":
.~~ . ; .... RECDMMENEfD FLIGHT \D\_E CtS; °/o: i :.. : -' .:... PROVIDES FO: o.' = -.-AT V..
-- : -. .:'....: IN STILL AIR OR FOR Z'.: . . : .1N 10 KNCT TATLWINb
.. :. .: .i" .; :: . :. . !-............... i .......... : ' '. ..
- ........ : ... ' : .... ..... :. : ....J ..... ' ... . . .I: .. ...... .. ._ .: ....... _ ..... .. .. . ... .. . . .. . ... !. . ..: ......... - : - ' i ' : i '- - ; .: .-.. .... , '. "' ::t.... ..- : . . . ;' :: .:
-' ' ; ! ...... :" ' . ; ' .,_. __.... , , _.._.:.,_.... ~.........._. i.. 7.... ..._._;..... _,:., .:...... ;.... ~.....'' . : _.. _ ........ . .. .
,; . '.. .'.! .: :·"~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ ., :" ., ... j ', ... '_.
CA-C A_,-_ '17/_ RNSD D T_ TIcST ZEIM TS VO GLlE D6-4040fCECK I SLOPE CONTFOL .ELATU.B TOAPR TRIM bATPA - EF. APR =
APRI~~ ~THE BOEING COMPANY .0 I
MOTE:
?
\ .' \
I. .
DI 4100 324o Y-E A! N E"KI96L

5.4.2 Flare Control Power
5.4.2.1 Incremental nz
.C.t...ri. Toh loa' ea.t-', (n T.l . .^..al ro
less than the values showsn below. The requirement applies at approach srecd,
with trim set for approach, with ground effects corresponding to the altitudc:;
shown, and with a thrust setting not exceeding the thrust required for const-t
speed in flare.
1. EaTmPRESET STbrY
I.o
0 5 o L
I -r +r/sec . \uK 11 E:4
Discussion of Requirement at Flare Altitude: CTOL transports typically
have a 1.3 g load factor (nz) capability in free air, at stall warning, at
approach speed; and the nz capability tends to increase in ground effect. This
flare nz capability results from the approach speed margin which is selected to
satisfy several requirements, and exceeds the nz normally required for flare
of a CTOL plane.
STOL transports approaching at sink rates comparable to CTOL -rill use
higher flare load factors due to the more abrupt flare required by the closer
c proximity between glide slope transmitter and the aim point. The STOL flare0
requirement is less than current CTOL transport capability because it reflects0
only the flare control reqauirement, independent of other approach margin
REV SYMNO Do-40409IPAGE 141

considerations.
The flare requirement is presented as a function of approach sink rate fro-
three reasons:
o To blend into the VTOL height control requirement of References 7 & 3
o To be consistent with the nz = 1.1 g requirement for glide slope
control at nominally constant sink rate
o To reflect the increased load factor recuirement for arresting the si
rate as VApp and/or I APP are increased.
As discussed under Section 5.4.4.1, nz control in an airplane or STOL
aircraft is analogous to vertical path control in a VTOL. In both cases, n,
is used to control sink rate. The nz required to flare depends on the sink
rate change required, and the time available to make the change.
The VTOL data on Figure 5.4-3 indicate that the nz requirements increase
as the vertical damping, Zw, decreases. Reference 8 points out that, for a
VTOL craft,
lk
zw= w ( 1)
where wo represents the vertical velocity, h. Since (TW-l1) is the same
as An z for a VTOL, a line of constant sink rate is a straight line in the zw
vs nzplane. Slopes corresponding to several sink rates are shown on
Figure 5.4-3 for reference. When these slopes rere matched to the pilot
opinion date of Reference 8 as shown on Figure 5.4-3, the requirements appeared
to support the proposed variation of nzflare with sink rate, although the levels
required were a little less conservative than those of this section.
The flare load factor was recorded during all approaches. It was found
that An z rarely exceeded .2 g in the flare. The maximum observed was .25 g.
The current study was conducted with an 80 knot approach speed on a 6 degree
glide slope, which gave a sink rate of 14 ft/sec.
As sink rate is reduced, the load factor requirement is also reduced.
BXA'=A o .DD6-40409
r.o
!
00
.9P.ot.0
0.9
a
REV SYM +
I
IPAGE 142

Discussion of Renuirement in Cround Effect: Proximity to the grotund can
greatly reduce the mnimunM lift capability of a powered lift STOL aircraft.
It is conceivable that some coiigula'ion coula niee the rn rcquiremernt at
flare initiation altitude, but be unable to sustain a flare to touchdo;an.
The intent of the nz requirement in ground effect is to assure the capa-
bility to control sink rate throughout the flare, and to assure that a0n under-
shot approach can be "dragged" up to the runway. Neither would be possible if
the aircraft does not have an nz > 1 g capability. Since this requirement might
be critical in sizing the powered lift system, an exoeriment was conducted in the
current study to determine the minimum nz requirement as follows:
o the lift capability (including all thrust effects) was limited to
a 1.05 g capability at approach speed.
o the simulator was set up over the threshold of-the long (10,000 ft)
runway with a 6 ft/sec rate of descent, which was the nominal sink
rate desired for touchdown.
o the pilot overflared from this condition and made a porpoising fly-
by just above the runway, setting up and recovering from conditions
typical of misjudged flares. Control Technique 'I2 was used. Vertical
speeds of +5 ft/sec were typical.
o the experiment was repeated several times. The strip chart recording
of lift coefficient showed that the lift limit was being encountered
during conditions which the pilot felt rere realistic worst cases,
and for which the lift capability felt marginal.
Figure 5.4-3 shows that the results of this experiment correlate very
well with the results of a prior moving base simulator test of VTOL height
control requirements. As previously discussed, the required nz capability
is a function of sink rate.
O
REV SYM - eat#A, NO. D-40L0 +PAGE 143

l
NOTE :I. STOL DATA FROM FSAA 1ASIMULATION OF EFg. 7 ltRST = / SEC
2, VTOL HOVER PATA ·FROM NASA TVID-2451, AUG 'd4
Sirl:olocrs O->.2 X-i4 & -'-,;/ .26 $c
C-- : -I .710 H-2I .10 sec.I Ft-2 2C - .Z5 sec
I
(X-4 - X-;;ti H',3C detErr-.i e 3)
3- 11/2 -. H- 2 R:2- / R)
1.1 1.2 1.3
n',MAX N' M-axirnumn up;lrrd confro! poiver, I
SLOPE OF COAI'STA/VERTICAL I/EIOCITYLINES -v
ZW = 90 (a n)
1.4
CALC Allson |2 -6-71 REVISED DATE COMPARISON OF STOL AND VTOL. D6-40409CHlECIK _________ ___ IREQUIREMAENrTS FOR hMAX/MUM UIPWARD.APPD' '] CONTROl. POWER FIG, 5,4-3
APPD0 . : ;vG E
= _ ~~~~r·i34aF_ CO/~~j~·i;a. fV 144
-I.O
-.-
v;
0
4ri:,
c-
:_E
0._;)f:t:
0.o
_t4
-. 6
-. 2
hO t.0
II
r,
j
4
Di 4100 5040 ORIG.3/71 J 15-047

5.4.2.2 Increment.al
Criteria: With the aircraft trimmed for annroach, it should be Posz-ile
to fl.e'e from the apro..ach to levei flig.ht ,:.tlc .i.inr .; .e ap.ro.:L,.
conriira.ti.on and the appr-oachl secd. The requirement for sustainirng lc-el
flight should be met in free air and at the altitude for the most adverse
ground effect.
Discussion: While STOL aircraft will not normally be flared to zero sirX
rate, the capability to do so is desirable to avoid landing short follo-win, a
misjudged approach.
This requirement applies to all viable landing confi'urations, incluting
one engine-out appraches wh.ere the selected approach configuration must be
chosen so that the criteria can be met. Once the airplane is comitted to an
all-engine approach, a subsequent engine failure requires only that the landin,
be compnleted and that the go-around requirements of Section 3.3 be met. The
field length requirements of Section 3.6 will cover the possibility of short
landings from such approaches.
0
C.
I 5 B..e N . ..410
REV SYM - |O D6-hO}O9 +^PAGE 145

5.4.3 Flight Path Control Sensitivity
Critxeria.: Colum-n and throttle sensitivity shall not limit the maneuver
cao aoiiity or perforloez.ce of the aircraft, arld shall riot result in undesirable
handling characteristics. Specific requirements are:
Control Tec:hnicue L1 - Pull forces and aft deflection of the column should bc
required to maintain increases in normal acceleration. The desired column
sensitivity is
nz/ cola 0.1 g/inchl
based on the steady state nz during an essentially constant speed wings-level
pullup. The nominal column deflection required to sustain a standard 3 deg/sec
level turn should not exceed half of the available column deflection, and should
not require colunl forces in excess of 20 lb (including break2out).
Increasing nose-up pitch rate should be required to maintain increases
in normal acceleration. The desired sensitivity, in terms of AQ/;%~ is
specified in Section 5.2.2.
Control Technioue i,-2 - Forward throttle deflection should be required
to maintain increases in nzand X . The desired sensitivities are:
nz/ col .1 g/inch
nz/ITHL f- 0.1 g/inch
based on the first peak of the nz response to a control input.
Pull forces and aft deflection of the column should be reouired to maintain
increases in nose-up pitch rate. Transient pitch rates during throttle inputs
writh the column centered are allowable, provided the resultant attitude change
is in the direction required for holding constant airspeed. Column sensitivity
should meet the pitch acceleration requirements for Section 5.3.2, and the level
; turn requirements stated above for Control Technique i'l.
00
REV SYM4 9 PAGE 146
- �I _ _C'

Discussion
Control Tecirninue -i'l - The optimum column sensitivity and feel spring
gradient depenr.s on several i'acturs, includinL 'ire aircraft responlse
characteristics aind the static nistrims (e.g. gear and flap extension) that
must be controlled.
The nZ/ col .1 g/inch recommendation is typical of current CTOL
airplanes (for landing approach), and was used during the current STOL simulation
study in conroination with a 5 lb/inch feel spring gradient. Since the nz
capability during a STOL approach will normally be less than 0.5 g, the
.1 g/inch sensitivity will not limit the flare capability.
The sensitivity is specified for a wings level pullup, and wrill normally
be less than measured in a steady turn, particularly if the SAS uses a high
gain pitch rate feedback loop. The column force and deflection limits for a
level turn are intended to assure an allowance for control in turbulence and
to minimize the need for retrimming in a turn.
Control Tech:ninue i-2 - In ttis mode the column is used to control attitude
primarily for the purpose of controlling airspeed. However, a transient load
factor response may result from a column input, and should meet the sensitivity
requirements stated to avoid overcontrolling and excessive coupling of speed
control (column) inputs into flight path. The nfz/6Th = .1 g/inch require-
ment was taken from the vertical velocity response requirement of Paragraph 4.6
of Reference 7.
Sensitivity requirements in this mode were not studied during the current
STOL simulation. A configuration considered marginally satisfactory had
sensitivity characteristics as follows:
o nnz/&col = .05 g/inch
¢W nZ/ THL = .04 g/inch
OrlFAJ/Yg .o. D.-. 0409REV SYM No D6-4o4o9PAGE 147

5.4.4 Flight Path Response
5.4.4.1 Load Factor and Vertical Speed Response
Crit-ei-: R--n-r.s5 of t'lie c.:.rol te-z- iqu c.'......
o The load factor response tinie constant, nz, shall Ilot exceed one
second; where ' nz is defined as the time elapsed from the initiation
of the flight path control input until nz reaches 63- of the first
peak magnitude
o The vertical speed crossover time, tl, shall not exceed 0.8 seconds;
where th
is defined as the time required to achieve a positive (upward)
change in vertical speed followring a climb command.
Further requirements are:
Control. Technicu.e ,1 - For a column step input at approximately constant
airspeed, the shape of the nz response should be approximately:
o first order, or
o well-damped second order, with the overshoot magnitude not to
exceed -lO0, of the steady state magnitude.
Control Technioue 7!A2 - For a throttle step input at approximately constant
airspeed, the shape of the nz response should be smooth and with no sign
reversals.
Discussion: Flying qualities criteria for airplanes normally do not specify
flight path response requirements, in addition to the short period frequency and
damning reouirements, because the flight path of an airplane is controlled via
angle-of-attack modulation. Powered-lift STOL aircraft, however, have the
capability for producing large lift changes through blowing modulation writhout
changing angle-of-attack. High authority DLC surfaces would also provide this
capability. Consequently, fli.g:ht path response criteria are also required.
oo Load factor, nzt has been used in defining the flight path response
criteria because the only way to change flight path angle is to change nz, i.e.
REV SYM NO i
IPAGE 14i
·__I

If speed is more or less constant, as in CTOL and STOL approaches, sink
rate is controlle3 by c..n:ir X a
In a ViOL landing, sink rate is controlled through nz dlirectly. Hence,
nz control for a CTOL or STOL is analagous to vertical path control for a 'VOL.
It appears that the tnz requirements are not dependent on the control technicue
used. While similar, the ' nz requirements for CTOL, STOL and VTIOL may differ
depending on approach conditions and the nature of the flare task.
For STOL landings on a short runwray, a quick load factor response in
the flare is required for accurate control of the touchdown point. Current
study results indicate the nz response must be quicker for STOL than for CTOL.
The requirements on the shave of the nz response are intended to assure
predictability of the flight path, and a smooth ride.
Vertical speed crossover time was specified rather than nz crossover time
because:
o 0 control is the primary requirement, although nz is used to control
it
o the control system lag time, which is a part of the crossover time,
represents a different percentage of the nz and h crossover times.
Using an h crossover criteria allows a euicker nz response to be
used to compensate for part of the initial system lag time.
Figure 5.4-4 compares the recommended criteria against the responses
of some of the configurations tested. More complete time histories are shown
in Section 5.2.3.
Study results are discussed separately for the two control techniques:
Techniquce ,l - Load factor response requirements were studied using SAS -l1.o
The results are showm on Figure 5.4-5. The studyi was begun with Tnz -, 2 sees.
and t
h
z 1.6 sees. This is more sluggish than desired for CPOL, but was
REV SYM NO D-lO!409 +| ArC 14I.... 149

RESPONSE TO TRROTTLE STEP ., ;is5 I!2
DEGSEC
CR; TERIA
0 0.;5
.1t " $SEC
-i ?r = I £SEC, C/'ITERIA
! / , .6sec, sAC lSFAcrORr
_ , 3 OF PEAK
I '. r-,* 2.0 SEC, UVNACCEPTABLE
.,/, .
0 0.5t Cv srr
an z
0.1
0
7W = 0o1 SEC,, CRITERIA
--20 ... ...--. .- .20lah d-,---·-h i
10 10 -FT .. . . . , FT
SEC . . SEC.... 0 ,- ........ : .. . . O
-- ..: .- 0 0.5 . O............. , .EC....
ALL, So vi 15 riaz·
. ~ ~~~~~ . :.
;....: : ..... ... ... .... . . . . . -. : .:
· . .:. j : '~~~~~~~~~~~ :' . : , ''
, , ~ ~ ~~~~ . ' , ..
., . ,,: . ,,.. , .j. ....-!,*:,It~ .l.t$ 4 - '.: :t* J
~~~~~~. . . .. .. . _''i~- ' ; .' ': .:-----~ ''. '. '.'
, ig if~alSO s_ _ 15r*S12 _ - t- | CURRENJ STUDY RES- ...... ¢ OMPARED WIT H FLl
iA ,; r : CONTROL CRI TER/1;>- .;r- -t- i ,---7-~.-_ _--· _____
!1 ~ ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ .
I~~~~~~~~ -._ _ _
I 'rnZ = ISEC, CRITE.RIA
RESPONSE QU/CK FWrUO'c,, UTr DIFFICULT ro
/ " PRECISELY CO,'TROL FLAR£
',__ d OF P6EAK
II %
0 0.5t "v SEC
,
0.5
t V 5EC
SPONSESCH T PATH
D6 -4040?
FIG 5.4 - 4
150p
0.1 -
A nl
0
. RESPON£E TO COLU4IN STEP 5AS 4 #1
I
I I .... _.-.
! ..
v Ocv ... .....
. :. ,. . ..
. . ' - .
-.- _ .. . _ . _

...... -- -............ _,.. -, ._ .. ~.
? -.0 ~'.~o ,~ -. : . 4 ',
-o. . '. ..: .,
0.5 1.0
NOr'~: 1. I ,,ME FrA. S'OL 5.,l'Ai'"'N,,.-N-~rO, l-,-:',
. D.; C'.AN ."'-T .C:,'G i' - ' , ... ,;', S- ".:
.- C ui.lC ~ , 2 .- .,', . . . t
- .,. IY...rF'" ' ". 'F. k' i t'.' .. ' ,,, CLL U ' '~- SlS
p~~~~ C.O~~"'TEIJ GL aNN "E tth "-' -\s
BLO,R r,,~,,, G,¥ t)L-'''tO4~~~~~~~. .. . .. ,.- _ . . . . .. (i . ... -
, ~ ~ ~ _ ' ..- -
... . :F? :
.*, t , .
'.--'-.'i-- i--['I -C_ _ _ _ _ L _ _' /
Fo,.L - C.M-r ' O L -.. C t -At?- ' -"" ----..
THE UOEI;NG COk:?..,i'Y
PILOTF,:; t ti .. r,
4-
a-I
00
D6-44o09
1FI 5 4-5
151
..'.. ;......
.. .!. : .
. .i .. . . . .- '..... . ..
- ..
* B\
: . . . . . .
. .. . I": . .:' :! :
. . j . . .
. . . .11 . . .. . . . .
.. . . .
. ,- . .- .
~i .
E _ , () i :n t.C¥ 0;: "'.'- rTl:-,
11. 4, 1"I 3 - 4 1

attainable without a direct forward path from the column into the flapds a:.
engines. The characteristics were satisfacto-ry for glide slope control anrl
for .LanI:ini-s in still air on the lotre rtmLwy. i-Tie''e^r, none of the pTi'cs
(all were eCxtrermely com.etent c.xperinuer.ntal test pilots) waas , ale to land it
on the STOILort from a U degree glide slope. On the long runnway, the nilots
could initiate a raore gentle flare from a higher altitude. This type ofr f1'e
could not be used on the STOL-ort due to the excessive air distance consum¢cd
by such a flare. IWihen the flare was delayed to the altitude necessary for
hitting the aim point, the response was so sluggish that:
o the flare was not completed, resulting in a hard landing; or
o in attempting to compensate for the sluggish response, the pilots
used excessive column. inputs, which resulted in ballooning and
floating beyond the touchdown zone. This overcontrolling tendency
can be attributed to the sluggish nz response, since a large Unz
gives a large X overshoot when the column is released.
By using a direct columan innut to the flaps and the thrust commnmnd, the
response was quickened to give nz i .6 sec., and tz .6 sec. With this
configuration, all of the pilots could hit the aim point zone on the STOLport
at the desired sink rate; and all rated the configuration as a 2 on the
Cooper Scale.
Unfortunately, it could not be determined from the test results whether
the improvement in controllaeility was due primarily to the improved crossover
time or the overall improvement in the response time. The recommended criteria
were, therefore, arrived at by consideration of:
o Current test results, which indicate rnz = tn = 0.6 sec is a little
more responsive than necessary
0I o Prior Boeing fixed oase-simulator work regarding DLC systems which
0 indicated t h (1 sec. to be desirable for CrOL
REV SYM DO;-. 0 109PAGE 152

o The Reference 7, Paragraph 4.3 vertical flight path control rcnire.-
ments for aircraft resnonse
o The reference 8, Pareraon 3.2.5.3 (V''Oi.) renuirement for a
100 ft/min rate of clfsnb within one second following a clainf
command
5.4.4.2 Thrust Response
Criteria: There are no specific requirements.for thrust response.
However, thrust lags may strongly influence the capability to meet the n,
and th requirements; particularly for systems designed for use with Colntrol
Technique j,2.
Discussion: Reference 7 specifies a maximum time constant of 0.5 for
both the thrust response and the vertical aircraft response (at constant
attitude) during STOL flare and touchdomn. Reference 8 specifies a maximuna
thrust response time constant of 0.3 seconds for thrust changes of LT/WI = 0.5
manitude during UCOL hover, but states no such requirement for STOL. The need
for emphasizing the propulsion system as an integral part of the flight control
system of some STOL aircraft is recognized. However, it is felt that there is
no more need to specify the thrust response characteristics for a STOL aircraft
than to specify the elevator or the DLC surface actuator response character-
istics. Instead, the approach taken herein is to specify the desired total
aircraft response. With this approach, DLC surfaces can be used, if required,
to compensate for thrust lags.
The effects of thrust response were investigated briefly in the current
study for Control Technique ff2. The EBF configuration was used for the study,
with augmentation limited to the pitch rate and attitude loops of SAS -1-2;
i.e., no SAS inputs to thrust.0o
REV SYM ____a__ NO. r!-4004O9
-r
IPAGE 153

The VTOL hover data on Figure 5.l4-6 were used in establishing the
References 7 and 8 requirem;ents for thrust response. Those data were obtained
i!' tahe .:~s~ T Cnto +- S5i .ntor by intro.:,! inJ ~ f inrst order lag betwcen
tihe' height controlier and. the liftin system cor: a.nd.
In the current study, engine dynarmics were represented as a first order
lag between the throttles and -the thrust output. Since the throttles were
used as the primary flight path control, the experiment was similar to the
Reference 10 experiment; except the task was a STOL approach, flare, and landingr
task rather than a VTOL hover task. As seen froml Figure 5.4-6, the current STOL
study results correlated very well with the prior VTOL study results in that
similar response tilmes are required for satisfactory control. However, it
appears that longer response times will be acceptable (though unsatisfactory)
for STOL, probably because angle-of-attack changes can be used at STOL speeds
to assist in initiating flight path changes.
The majority of the current study was conducted with a thrust time
constant of one second. This thrust response, in conjunction with SAS A.2,
gave marginally satisfactory flying qualities.
ri
REV SYM .____/___'_ No. D6-4 0409
IPAGE 154

tJOTE :
OV TOL HOVER DLAT.4 FRO.M NASA TD -2-51 ; ,U. '64
2 * S L W A FR..OiMcy 1 TO. rOF 3
2. STOL DATA FROM FSAA /A1UL.ATION OF EBF
I:) r ,r- -
*ap
C 6
0
6-
I)
O_
0r.
'c
2
0 1 2
7 THRUST ^- First order tirrne c-r.stcnt, sec
COMPARISON OF STOL AND V7OL
flE4UIREME rTS FOR THRUST RESPONSE
J 1-04 701 4100 B040 ORIG.3/71
3

5.5 'need Control
A complete coveraoe of longitudinal control must include a discussion o',
speed control as w-eii as :Litch attitude and rl.li.ht path contrrol. Speed control
requirements would include critteria for control powrer, sensitivity and the :
of the speed response to controller inputs. The present study produced very
little data to substantiate suggested criteria or to guide construction of no.;
requirements. Further work is needed in this area to com!lete the definition
of the complete criteria set. The following are offered as suggestions.
5.5.1 Speed Control Power
Criteria: It must be possible to hold the desired approach speed, and to
change speed as required to transition to CTOL flights.
Discussion: While the requirements appear trivial, they are stated to
draw attention to potential conflicts in designing the SitS. The speed-hold
capability of the augmentation system should not be emphasized to the exclusion
of the requirements for changnin: speed.
5.5.2 Speed Control Sensitivity
Criteria: The speed controller shall provide direct and rapid control of
speed.
Control Technioue url - Forward movement of the throttle should produce an
increase in speed, while aft movement should produce a decrease. Throttle
position should indicate the amount of speed change capability remaining.
Throttle sensitivity in terms of longitudinal g's per inch is unknown.
Control Technioue ,r2 - A nose-down pitch attitude change should produce
an increase in speed, while a nose-up change should produce a decrease. The
A Q/ V requirements of Section 5.2 should be met.
2 Discussion: The directions of speed control movement are conventional for0
both techniques.
I _. . - - .REV SYM _ ,t, NO. TYShI PGE+
IPAGE iJU

When using Technique l1, the requirement that throttle position Should
indicate the speed control remaining is consistent with current unaugimented
airnplaes- end is conad'rl necessary as a warning that the f!.I.ght path
angle is approaching values beyond which the trim speed can no longer be
maintained (stall or overspeed warning).
1When using Techmniue i?2, speed control requirements should probably be
similar to VTOL criteria. .
5.5.3 Speed Response
Criteria: Unlno;rn
Discussion: Wnile the criteria for a satisfactory speed response have
not been determined, the tine histories in Section 5 may be useful. Speed
control was considered:
o Excellent with SAS 7i71l
o Poor with SAS F-2 (slugsgish, excessive attitude change required)
5.5.4 Stick Force During Speed Changes
Criteria: If speed is changed at constant flight path angle from a trimmed
condition, the slope of the stick force vs speed curve (excluding breakout)
should be in the range
0 S FS/ VI 1 lb/knot
If the stick force required to maintain straight flight is other than
zero, a push force should be required if speed is increased, and a null force
should be required if speed is decreased.
Discussion: When speed is changed, a pitching moment normally results
which must be balanced by the pitch control to maintain straight flight.
PAssuming that the stability criteria of Section 6.0 are met, a zero gradient
of stick force vs speed is preferred and can be attained by using an augmenta-
tion system with feedback. If the aircraft does not use X feedback0
it will probably be impossible to meet the Section 6.0 stability criteria
REV SYM ___dwjrlf~B__-;,_' NO. DO-140!9 0PAGE 157
r

without having a stable stick force vs speed gradient. The upper limit on
the stable gra(lentrs is taken from extensive fixed-base simulator studies oi t::
Simersoni.c T!rnssort,
While the precise value of the upper limit is somewhat arbitrary, the
pilots participatinmg in the SST studies agreed it' was in the vicinity of
1 lb/knot. The liji.t is stated to direct attention to the fact that excessi;vely
stable stick force vs speed gradients can be objectionable due to the e:,cesivec
retrinming required during speed changes, and due to adverse effects on Ditch
dynamics.
sBOwfN !mNO. D6-402o09
PAGE 158 +
P.
0
00
qt
VIt-
o0
0
REV SYM
01
-1
I
I
-1

6.0 LOIGITUD1IITL STABILITY
6.1 Longitudinal Static Stability
6.1.1 Angle of Attack Stability
6.1.2 Speed Stability
6.1.3 Flight Path Stability
6.2 Longitudinal Dynsnmic Stability
160
160
161
161
162
-I
o0o
0
a
REV SYM _F'B__'_ a No. D6401 1409
PAGE 159159
+
i

UO LOI'ITUDII,:1.L STABILITY'
6.1 I,on;-itudiinal Static Stabi.lit
.Cit--r Wth o;he En: ~r.tca! 1a5r, for 'rll .toriy f ht coni^ t...'"
at which the aircraft bight be operated continuously, the aircraft should -os.c:;,
the stability characteristics outlined below.
Discussion: As stated in Reference 7, "the primary purpose of stability
is to reduce divergences in airspeed, attitude, or angle-of-attack, which, if
undetected by the pilot, could result in an unsafe condition in the form of
either large. attitudes or insufficient control for recovery."
The requirements pertain to continuous operatirng conditions because the
pilot will normally be actively controlling the aircraft ,when outside these
conditions; e.g., speeds below stall warning.
6.1.1 Angle-Of-Attack Stability
Criteria: If the aircraft is perturbed from a trimmed condition by a gust
input with column and throttles fixed, there shall be a tendency for o( to
return to the trimmed value. However, this tendency should not be so pro-
nounced as to be objectiorable in turbulence. If the aircraft is poerturbed
from a trimmed condition by a flight path or speed control input, there should
be no tendency for (o to change farther from the trimmed value after the cockpit
controls are released (except for momentary dynamic overshoots).
Discussion: The intent of the requirement is to assure that the aircraft
will not fly into a stalled condition if trimned by the pilot and then left
unattended while his attention is diverted by some other task (e.g., navigation
problem, system malfunction, etc.).
Separate specification of requirements in response to gust and control
inputs is necessary to accommodate sophisticated control systems which allowo
the pilot to commaand a new flight condition and then "hold" that conditiono
when the controls are released. As an example, consider a control system,
REV SYM ~~%~- .NO. D6-40409 L
IPAGE 160F--

designed for use with Control Technique mA2 which allows the pilot to increase
g at constant speed by pushli.g on the throttle. The angle-of-attack may
4ece-.~ de,~ to to,';e in rlc:.;~L 6z.G:i,.;-; fl'e L-,-v
a safe situation, although there is no "tendency for oC to return to the
triLmned value" as is required for the gust input.
6,1.2 Speed Stability
Criteria: If the aircraft is perturbed from a trimLmed condition by any
input except a commanded s!eed change and the controls are then released
(hands off), there shall be a tendency for speed to return to the trirmmed
value. If perturbed by a speed change command, speed should not diverge
beyond the commlnded value.
Discuss ion; The intent is to assure that the aircraft will not change
speed significantly from the trim speed if left unattended by the pilot.
Stick force vs speed gradients are not specif:!ed. 'rnile such gradients pro-
vide a convenient means for flight checking static margin, they do not
necessarily assure s-eed stability; e.g. a strong speed vs thrust instability
could offset the stable static margin and produce a sneed instability.
Further, stick force variation with speed is a nuisance when the pilot is
intentionally changing speed and the requirement for it would preclude using
a stability augmentation system having a X -hold capability.
6.1.3 Flight Path Stability
Criteria: If the aircraft is perturbed from a trimmed flight condition
by any input other than commanded changes in speed or flight path ( ), the
aircraft with cocknit controls free should tend to return to the trirmed .
If the aircraft is perturbed by a commanded change in speed (V), a
stable X vs V relationship is desirable; i.e., steady state reduction in0
speed should be associated with steady state increases in cli:ob algle.
0o0
REV SYM ,N_,____.,_, o. Dub- 1 10O!)..IC -1 !~~~_k/.IPACGE 1l
__ __·

However, an unstable Z vs V relationship is allowabole provjied the sloe
3</z .V does-n6t exceed the lid.its Irescribed ulder Section 5.2.2.
(steady state) from the trirn.ed flight _ath if lef unattended by the nilot;
A phugoid about the trLTmed ~ is acceptable.
The slope of the X vs V curve relates to flight on the back. side of
the drag curve as previously discussed under Section 5.2.2.
6.2 Lonaritudinal Dynrvaic tasi lity
Criteria: If the aircraft is disturbed by a gust input; or, during fliglht
test, by a control input representative of a gust disturbance, there shall be
no clivergence (aperiodic or oscillatory) in the aircraft response. In
addition, the frequency and demping of the pair of roots (real or imaginary)
that dominate the short term angle-of-attaclk response shall meet requirements
of Figure 6.2-1.
Discus;sion: This requirement is similar to the Reference 8 criteria,
except the response characteristics have been limited to stability (i.e.'
response to external disturbance) rather than control inputs. Response re-
quirements of Section 5 should be met for control inputs.
As discussed in Reference 8, the Figure 6.2-1 limits assure a positive
maneuver margin.
0
00
R YO.DS4OO f
REV SYM ~WPJ; | NO. ])6E-40409_4_
I P AGE 162
-~~

- 0.3
1
,AO/"-EC '
\\'I
I
-
TI
StF
S2 - (11 + A ).) S+ 1)2 =0
_· .. 1
5" 'I ;" ,n -' r, - u*n r
tjE CF i U .l·) DXES A; Sid E ·J ii: HL [ ;tk i: jcARiO.'E~l I'-E fB A!GH,`.- '- E:X.?l ;,- .... ·3 N
;X' E iN;, 0 O' S.
LEVEL 1, LEVEL 2(lF -).T77rrrrr-T T T,-,, T'',T 7, ~ :r
/1 i i I , .
I1t7 .- -j ,,, ; i r ,~ I , . I / i i 1 4 " 1 1 1
REFERENCE : MIdL -F-83300
CALC SALIel j SFEi 7__ _REVISED DATE SHORT TERM LONlITUDINAL RESPONSE D6-40409
CiHECK _ _ _______ REQUIRE MENTS
AP PD r)l 6 -7
APPD D : _ .'-, 13 PAC
- ____ ___~__ _- _______________________ 163PI 4 o0 504 =RG37 Jf 1f5J'' -047' P.2/t = P
U
II
!2 I I I .,,,,, iI
2¢ -. SEC'
D01 4100 1040 ORIG.3/71 J II-047

7.0 L'TERtAL DI:CT:IOC'L COi1TROL
7.1 Directional Control
7.1.1 General
7.1.2 Steady Sideslip
7.1.3 Heading Response: Crosswrind Landing
7.1.4 Heading Response: Fmgine-Out
7.1.5 Go-Around
7.1.6 Minimnum Control Speed
7.1.7 Sensitivity and Linearity
7.2 Lateral Control
7.2.1 General
7.2.2 Roll Control Power
7.2.3 Sensitivity and Linearity
7.3 Lateral-Directional Cross Coupling
a'- :-c
0O
I
'S
oo
165
166
166
166
167
167
168
168
169
170
170
171
173
178
REV SYM D6-040109
PA^GE 164
I
LA'"4:-7'.q , I NO.

7.0 ILEflL-DIF3CTI0YAI, COiTROL
The present study was m.ade using, a linear nmolel of the lateral-dire ion al
* 1C U.&.-la .C....].i f ;J. UCr WinlS
provided to give good handlirng qualities and alloew adequate control of cr..irne
failures. A lateral-directional stability auentation systeym, S..S, was pro-
vided to improve the basic vehicle characteristics.
The fully aug, ented lateral-directional handling qualities .were rated 1.5
to 2 (Cooper scale) by the pilots. The unau3mented characteristics were rated
unsatisfactory to uniacceptable.
The control pow-r was sufficient to make satisfactory .uroach.es and
landings in 30 lnot cross.irnds. Both the wing low, steady sideslip method,
and thile crabbed approach i?-th a decrab maneuver just prior to touchdow-:n, were
evaluated.
Landings and go-arounds %with ant engine failure were performed. The effects
of large rolling- and yawing mo-ments due to an engine failure were simulated.
The lateral-directional SAS made these failures easy to control. Landings and
go-arotunds with a failed engine were easily performed, and were rated satis-
factory by the pilotso
The selected criteria presented in this documrent are compatible with the
optimum. vehicle characttristics that were chosen for this study. Since the main
purpose of the study was to investigate longitudinal handling qualities and
performance recuirements, no attempt was made to define mninimum levels for
lateral-directional control. Therefore, the following criteria are based on
criteria reco-mended in the literature. Applicable results fron the present
study are used to supplement these criteria.
0
o
REV SYM =a;ltji r6 N!
1- ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ ~~~PG e
IPAG, Et5)

7.1 Directional Control
7.1.1 General
-Cri' ria: iht ruder - cda_ dlz!t o and force zal.l roduce nosc-
ri,nht yaw;, vad left pedal deflection and force shall producc rose left yaw,.
Yaw control rowe.r shall be sufficient to coordinate turns, provide trial an,.'
maneuver capability durinr steady side slips or rwith the most critical engine
failure(s), and provilde sufficient control for decrab maneuvers.
These criteria shall be satisfied from initially trir.Lmed conditions
at the specified reference approach speeds and wind conditions,
Discussion: The design of the directional axis is governed by maneuver,
trim, and upset control considerations. For cross-wvind operation large rudder
pow:er is required for the decrgo maneuver. The decrab maneuver also mak.es
significant delmands on directional dynamic response because is is done
inemediately prior to touchdowmn.
MIany STOL configurations have large yawing moments resul.ting from engine-
out conditions. Trin-mang the roll axis often increases these moments. The
yaw control power must be adequate to permit safe landings to be made in the
wind envircnment that existed when the landing commitment was made.
7.1.2 Steady Sideslips
Criteria: Steady state sideslips capability shall be the lesser of
25 degrees or sin-1 . (30/airspeed in knots) at the reference approach speed.
Discussion: These criteria are based on Reference 8. During low speed
approaches in cross winds large sideslip angles may be encountered. Airlines
have requested the capability to operate in 30 knot crosswinds. Present day
short-haul transports do operate in crosswinds of this magnitude or larger.
Therefore, the criterion stated will give the STOL aircraft the same capability0
as present day aircraft in the speed range above about 70 knots.
0 Below 70 knots the steady sideslip requirement has been relaxed. This
REV SYM XgiT raa NO. DO-l!O!09_ +
PAGE 166
- r

has been done to reflect- practical design pJroblcms associated with thse lcx
landling spceds.
7.3 i o N~ '7,', R espons: Crtos?.:n i,2?di. -C
Cri-teria: W;Xith the aircraft inittially in tri.r.led s;.lmetrical fliGllt,
the heading response to an abrupt maxrtnum opedal input shall be ;.ithin the ran. :e,
1.0 deg & A %-2.0 15 deg. This shall be accomplished. with h the wing-s held
level at the reference approach speed.
Discussion: Durin, an approach in a crosswrind, airline pilots usually
crab the aircraft to eliminate sideslip and maintain localizer track. During
flare arnd touch0dovwn the pilot imust decrab the aircraft so thar the aircraft
touches down -ith low side velocity and with the aircraft aied down the
centerline of the runway. For good handling .qualities, and for precise touch-
do-.nms, the pilot must be able to decrabo quickly before the side velocity
becomes excessive. Iie must also keep the wings reasonably level to avoid
strilinr a nacelle. The present study showed that the aircraft could be
successfully decrabbed from an initial crab an-le of 10 - 20 degrees writh a
directional response as low0 as s 10', although - 15" was considered
to be about ontinmun. Boeing STOL simua.,%or studies have sho':m that the de-
crab maneuver shculd be pcrformed in 2 to 3 seconds and tha.t L* 10°
is a minimum level of yawv response for acceptabole operation.
An aircraft with a crosswrind gear would not need this decrab canpaiiity.
7.1.4 Heading Response: Engine-Out
Criteria: The aircraft shall be able to safely decrab for landing in
a 30 knot crosswimnd with the most critical engine inoperative and the
remaining engines at the higher approach power required for continued landing
with one engine inoperative.0
0
REV SYM ____ _ |NO. D·.-I O}) bO) PAGE 167

DiscussCion: If an engine fails during an approach, lbelow the critical
height where a go-aro'unid cal be .e-rformled withou.t touching dowm, the nilo
will hatve to continue thlwe r.-,.~ach and mak-e a landjing, T"he la.n0din. need rnot
occur a.t zero crab, but must be made safely.
7.1.5 Go-Around
Criteria: It shall be nossible to maintain straight "fl-iht with one
critical engine inoperative and the remaining engines at maximrLum power, at the
reference approach speed. A hleavy turbulence envirorment slhall be assu.med.
Discussion: The airplane must be controllable writh one engine failed.
It must be possible to appply power for go-around or maneuvering winthout
wandering beyond the conSines of the landing anproach corridor. Since the
landing comitMent may be made before the engine failure occurs, a heavy
turbulence environment must be assumed.
7.1.6 Min;.innum Control S-oeed
Criter:. ,: It shall be possible to maintainstraight flight w.ith a bankc
angle less zhlan 5 degrees with a critical engine inoperative at V 6 0.9 V app.
in the landing confi-gur-ation. The power setting on the remaining engines shall
be maxilmurm power.
Discussion: The above requirements are intended to give a control margin
with respect to the approach speed so that the pilot can perform a go-around
following an engine failure. In the present study the folloirng sequence was
used to make a go-around followring an engine failure. After recognizing an
engine failure, the pilot arrested the rate of sirk and applied nower. In
general, while performing the go-around maneuver following an engine failure,
the pilot selected full thrust and completed the go-around without further
4; throttle changes. As soon as the engines began to spin up he selected go-
o
around flans and began to climb. The pilot was able to maintain speed during
? the level-off maneuver and while he was transitioning to go around flaps.
REV SYM Att______ w o. -_D ! 0 1)
168PAGE

Durini, the cli.nb out the 10j sneed margin was sulficient.
7.1.7 Scnsitivity and Linearity
fCr':Leiia: Wilth the aircraift in:icia.l!y tritmedl in si;raiaght f'i.Jchtv at the
approach speed, the -avr arn.,ulr acceleration fcllovrinig mn aebruot 1.0 inch
input of the yaw control should be: 0.05 to 0.10 rad/sec2.
For sideslip a-ngles between 4-15 degree, variation of yawr cckipit control
deflection end force with shall be essentially linear. At greater sidcslip
angles, an increase in deflection is reqzuired for an increase in sidcslip and
a gradual lessening of force is acceptable. Hioever, pedal force shall not
drop to 1/2 the maeximaum value.
Discussion: These criteria are taken from RPeference 7. The direccional
control system used in the present study confcrmed to these criteria and %was
found to be satisfactor-y. The directional force characteristics are defined
in Section 4.4. The pedal to rudder gearing was linear.
0
REV SYM N 1PE.-C|NO '169;,,\ o.
'9~~~~~~~~~~~~~~~~PC
- r

7.2 Iatersl Control
7.2.1 General.
. Crer t ro l co:trol dcft cti on and force sh.1. produce a rin ht
wing do:.m chng.e in ban.tt, anlle, andl vice versa.
Roll control po,,er shall be sufficient to attain a desired baki! angle
quick-ly, to maintain ,.ings level during a decrab maneuver, and to provide trim
and maneuver capacility with an engine failed. For all conditions, sufficient
roll. control to counter the effects of turbulence is required.
Discussion: During the larnding approach the basic maneuvers which lateral
control must be designed for are:
(a) Trackiin- the localizer bean. The pilot desires to ma-ke small
lateral and directional corrections using wheel alone. The roll
response to wheel must be free from time lags for small control
inputs.
(b) Large turns. iWhen capturing the localizer beam or wh.cn rma.ir g
a sidestep maneuver to correct a lateral offset, the pilot -irll
make large turns. Crisp bank angle capture characteristics are
required. For all turns, the roll rate and cross coupling
characteristics are important.
(c) Decrab - The pilot needs sufficient lateral control power to keep
the wings level during the decrab maneuver, plus some reserve to
counteract gust disturbances.
(d) Engine Failure Recovery. During approach and landing, safe recovery
.from a critical engine failure must be possible. The pilot must be
able to safely control the transient amd arrive at a satisfactory
trim condition. He has the option of continuing the landing or
making a go-around. Since there may be no prior warning of the
failure, full turbulence envirorment must be assumed.
REV SYM -:f7NOD-hO IooJ 17 0PAGE 170
V0
1
I
I
0Iro
o
0oo
a
+
I __1�1� _ ____

7.2.2 Roll Control Pow'er
Criteria: Roll control po ;er for mazneu;ering shall be defined by the
tim= to achicve a ...c.fi4 boC-- gle, n a n tz t 4 , -n rs .' sose to
a m:aimur coc,pi t roll controller irnput. For turUoses of comparison, it shall.
be assumed that the lateral control surfaces have a ranp response of 0.3 sec. to
this conm.:.and.
At the reference approach speed and in the design turbulence envirornaent,
the lateral control pow;er shall be adequate to provide:
(1) a minim.um banl; angle response of' t 3 0 , 4.0 sec. in addition to lny
lateral trim. require emnts. For example, with a critical engine failed
and a cross-rind level as defined in Section 7.1.2, the roll control
shall be able to develop a barnk angle response eq'.valent 'o
t3 0 = 4.0 sec, for a continued landling or go-around.
(2) for maneuvers initiated from symmcetrical flight conditions,
t3 0 ( 2.5 seconds is required for satis'-:,ctory oreration,
In addition, at the minimum control speed as defined in Section 7.1.6,
there shall be sufficient lateral control power to bal.cance the aircraft -with
the most critical engine failed and the remaining engines at full po;er.
Turbulence is not required at the minimum control speed.
Discussion: Roll control requirements can be divided into two categories.
(1) Roll control reauired for normal maneuver starting from symmetrical
flight such as tracking the localizer, turns and sidesteps.
(2) Miinimum, roll control po;er for maneuver and stabilization required
in addition to the roll control required to hold a steady sideslip
and/or to triL an engine failure.
2 The normal maneuvering requirement (t3 0 = 2.5 sec.) was taken from
0 Reference 5. Reference 11 recom-ends a mini-um rmaneuverinr. requirenlent of
t30 = 5.5 sec., and Reference o reco.,tends a minimum roll control requircmentt30
~~~~~~~~~REV S ~ ~ ~ ~ ~ ~ ~ ~OYM No.:--',,,,o. UPAGE 171
_ _ -I __I, r

of t30 = 4 sec. for a maxi:.:uim surface rate roll co.;mand..
From the results of thice nresent study; it is lifficult to de"fine th^ ;:.i..:
t3 0; reciirenents, For la.--:e eel h et.etef oleaos the .atcra) control sy.te.m 13
came saturated due to the hi;h gains needed to gl;ve " pr.cr sensiti-ity aro 'l
neutral rwheel deflection. *Then saturated the roll mode time constant increased
from about 0.4 sec. for nominal deflections, to about 1. sec. for large de-
flections. Therefore, t30 for a given roll pow.er, L .S , varied according
to the size of the wheel cor-and and de'ended on the amount of trim command.
A block diarman of the roll control system is shown in Figure 7.2-1. The
static gain for the -rheel (P = R =0) is about 3. That is, mar'Lmuvr.i rollin.--
mor;ient (initial roll rate and yaw. rate zero) could be co=amarded wmith 20 degree
of wheel.
Figure 7.2V2 shows the lateral directional time history of am approach
and landing in a 30 k-not crosswind. The pilot was able to satisfactorily
control the bank-, angle and to make a heading change, of 20 degree to align the
aircraft with the rumnay centerline.
The incremental roll control power, L. , 1/see2 , available beyond trim
varied from about 0.26 ( = 170) to 0.2 ( = 220). Roll maneuverability
available beyond trim was in the region, 5.5 > t3 0 > 4.0 sees., for an
assumed roll mode time constant variation of .4 sec. to 1.0 sec.
For normal maneuvers, tLs.s = 0.5. WTith a roll mode time constant
of 0.4 sec., t3 0 then varied from about 1.5 to 2.25 secs. for a maximum surface
rate cormand.
During the present study engine failures were simulated. The relation
between available and required roll control poe-r is showm in Figure 7.2-3.
Heading changes were made during a go-around followring an engine failure to
evaluate the roll control. The roll control npower was judlsed to be
satisfactory. This margin corresponds to E ALS. r beyond trim
REV SYM _ e z-~'~.e |No. D{-b40h09PAGE 172i2

= 0.2 rad/:;cc 2, 1R = 1.1 seC. or t3 0 = 4.0 Sec.
7.2.3 Sensitivity and Linjiea.rityr
ritEi'ia'. The S.'nsitV:y'' of 's le.a 1 ruor 1 SJ-t.er Shall be:
-->- ~ 0.72 dog/inch. This reauire'enent shall be met for the smallest
controller r.oti'c that is used by the pilot in approach and landing tracking
marleuvers .
In addition, the variation cf aircraft roll response with controller
deflection shall have nio abruTt discontinuities.
Discussion: 'The.se criteria are 'based on References 5 and 11. Lateral
control sensitivity is irLnortant because it provides information that allows
the pilot to anticipate the control input magnitude reouired for a given task.
The lateral sensitivity is expressed in terms of a bank angle change in
one second becau.se! this retains the depvendence on roll time constant. The
de-cendence of lateral sensitivity on roll mode time constant has been clearly
demonstrated in i-:eerr.c 12.
The lateral sensitivity requirement must be met for the smallest controller
motion that will be used in approach and landing tracki:,3 maneuvers in order
to linlit control system lags. Boeing e.xerience has repeatedly shown that the
pilot is very aw-re of transport lags that inrhibit the development of initial
roll (or pitch) rate. A pilot can detect a transport lag of 0.1 sec. in roll
rate and will downgrade the configuration if it exists.
Specific linearity requirements have not been imposed because Reference
12 has sho~wn that pilot opinion is a function of the comrined nonlinearities in
the feel system and gearing. This reference shows that the pilot wrill tolerate
a certain amount of nonlinearity, but these systems can potentially cause
e problems with coordination, PIO's, harmony, differential sensitivity, and other0
o force related problems. If significant nonlincarities are to be incorporated
g into eitiher the feel system or gearing, attention should be given to the
REV SYM .,-'",/.o D6-40409
PAGE 173

pilot 1'eaction to the srzccific system in perfonni,; his tot!al tas.;.
N
_________ _ NO.]o. IT -l0'_ 09
PAGE 174
2'3c
Ir00
0(V
a
REV SYM
v101n,
pIIc
In

i(i I9
II!0i
_ 0-Io41 J
d (j-10I0 +10a..
I-0z
0 ~zr0 L.I
J0IJ
FICG
. 7
.2 -
I
trn2
7ziA
,io
. D6-40409P
AG
E
1756-7
0()0
Ll'wi
4-
0t 'D0
REV SYM
-i4c

NOTE :TIME SCALE TIME SCALE CIANG--e
.. i t0s.:!---s40 ' _0--~- V
ooU C-· -s';. . . . . .' -. . .- . . .· 0O· .
II~~~~~ . . . . , .. ; .-ji~
,v~~~~~~gC,£CE$~~~~~~~~~~ ~ / ': %'--.-~
ji ·-RC~~:: ...... ' '
-DEGREES AT--~~G;ISEZ J ! i ''20J -r~~o- , ·i· :.i i'··5-i ! i !i ? ;, ?.:~,~,~t I ,! c
i ·,~v~,-~·. ::' %' :.~'~ ,,~ ... :
10/ - N ' ji~i.i
DEC;REES
~~~~~~~-.i. :. ._..... '''''':;' ~""'' '~.. .. ~. ... " - ' .'i.o;.i. :, ... ;....- .... ': ..: . -..
"°-E~ .. ; :.~:: : .' '~it·:CS
:.:.Y" kV:..:: ! i. ii
i !.. J .: i:.. :. .A.... .
'!.::'O ......
20 OEE 1 , ·- 4 -- :- ---- !
JR ' !
'~~~~~~-~:. ;. .:'::: ':::.-':i .....
-20-~~~~~~~~~~~~~~ : ' . . '::...0: "f.i P, L..:, -F .6~u 20- , :..,~....... /.............:-. , . .I : ~....,. .... ~. . ....... ,..
.. ~~~~~~~~~~~~-- .. ~.... ...... , ...... ~~~~~~~~~~~~~~~~~~~i '1 ~: ·.. [ ; . .....,". %'~~ .~t,~~, ...... :. . .. .. x..
/v~~fO~g£$ | .vlNC~g$ : -.. ~.. . , . .. ~ ~.. . : : ,. .:: .~ h: ='iii . .. ·· '¢;·'i· ,:' : ; .·
-10 -2-o i -;-20 .....
a, po i .1 .:~~~ -: I i ·-·I ACCEL; IX
A DEG/s E~c 2 O--F -1/5 E Sc
-~O-J - 4-i ~ ~ ~ ·~ ':'..'~'" ~ :-'~,- ; at,:,gctv q~.;~L,?-/~.;rc,, _'.i....: ...! [..
10 -rto- .i-i: I: .2-f_'; ::i::~I .i...i. . .; .. '.....~ ...!. ;..r ~AA ' ~'.r=.. :'~:?r.,Cl' ....
C" E N, /- J
NDEG/SECZ I2 ~~~~-~~Jf . I0-'[ ; tO-r '! , ' i i'.-P: I , .. 7..':'e:.. !1-? ':-'", :., 'iG·F· ' '
~/ ~--'j"~'- 1 '"~-:'t~ ~'" ~'' :=''~~~~~~~~~~~~. .. ~... .~'" : . .. ·.:' ; : ...., I: .... ;.: ''r.......":....
10,000 ~ ~ ~ L %.., " * ~.'~ .' :' r r . '~ ; ~ . ... . . .- · · : , .. , .- . *-- !· .. ;~.......
'tO- ] i tn i..... ;.. 4 ..r .']tj OL R:E ,Oy.:.¥ l.
XRE' i'', ' .P....... : .:
O YREF--O--·--:· - ........ !.... -. ?- .. ~..;_~..;.: i .. .. ,,I .. .. .3 zoo~~~~~~~ -]' 'r }"3tl~ t-';. '{ ......
4 4FEET 20,000 .. .. j FEET. . . . . . . . . . . r ' 'I .200. . .....
NOV. :-: COP. 044
REVISED OATECAL.C A--- AE PPROACH 1AND LANDING D6-4040P
___C!___ ___ _ IAN A 30 KNor CROSSWINh D~~APPO D ~ ~ __ ______ _FIG. 7.2-2
APpO 0 AG E
,l 4/E~,,.,HGa/; 4 lU -n ...-176
I
DI 4100 B040 OIRIG,3/71 J 15-047

NOTE: 1. ", = 0f
-. : ....0.8
...:' . ;N
0.6
0,4
.. ............. ........
0.2,. .4 - .
....... : ;.... .... ; '..~~: ·
i ..... :.i:. i ....i ' ...
· . ,,.
~~~~~~~~~..._..'_. :....:.: :...:.. .....:... .. FAP
. !:! ;'i :ii : : " : '/ : L B
' ~~~~~~i-ii: j...l.-..·:' :'i''
-. .:...:: .......:...:..:.:.. ..... :... :.....: .: ..: ...:.... 1:. ' .:...- : .
: · ;: ,: ... ',; ;.'.......
.; .... 1. .-.. i.
.. .~~~~ : .. ';·; ... .
?EQlUtRED
0.. ...:: ... ....... ... .. .. 7 0 -7 5 8 0 ..... ... .!i':·:' " :'":: ... ...O."'O IT N T! ..... ..-. : '...'............ ........ '. ...'.. ! ..... .... ... . .
........' ..:...i...;..;.;..;. .. ;;.:...;.....; ... . ........................ ; ................... ;....'...
~::. ! '}: :i':!.;il " ' ':i': !' i ;i~i.:..i . i:' i i::...'. ... ...
i....... :.... ...... : ... ..... ......1.::.:....!.:..: ....... ::.. .............. ...........:....:.:::....:
' . . . " ..: ... : : .... '-' . ....: '...... . .' ..
i .. ............ .....
. .. ...... ................. ....... r~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
Li!..: ........:.: .. ...... .... .... .. ...... .. . . ....... .... .......
. ... ............................. ................. ..... ..i:' ': , . :: . .: : , . ···i · :.:-' :':.:',; · ;· : , : ... ;· : .'.. :~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~· ·
i~~~~~~ .... I..
i..~~~~~~~~~ ~~:'. .· ,· ': :.: . :.-. ···· - · : ' ... ··:' ··: ···:···
¥7 --'/_- iS i7;~(E ~t
I~~rR75_' " .! .......*-- -4----
*i
ROLL CONTROL MARGINS BEYOND D6-4040o4LANCE OF ENGINE F,4ILURE
FIG 1.2-3
177'
I.. ...... I..-...
- .. :. . .
'i

7.3 Lateral Directional Cross Couplin!]
Criteri.a: E'rora trir-mld conditions at the selected reference approach
roll control irp-uts y-aw control free) up to tilat required to -met the roll
control row;r criteria of Section 7,2.2 should lie betwieen tle icll.ok.in[,
val.ues of the ratio of n-i;m~, sicd.esli. ,ngle 'to o' nrle:-
-.1~( < ( &0/ ),. 44 .3
Also, from the saure trirnzled coniitionls, the value of the paraieter Oosc/~4av
followring a.yaw-control-free abrupt inipulse roll control co.-mcmand shall be
within the li-its snecifiesd in Figure 7.3-i.
Additional requirements on lateral accelerations due to roll and yawr
control inputs raray be necessay to insure adequate pilot perfomnance and providc
passengrer c. Vrt.
Disc:::';ion: The sideslip criteria of Referenco: 5 has been justified as
a goodt indicator of lateral directional cross coupling in a n;:foer cof
sim-liLator evaluations. As modified by the results of Reference 11 to include
prorverse yaw conditions, this par,-aiter is the most tested of the many
proposals ir. this field.. The {~ /~ 4 / %c parameter proposed
by Reference 8 has theoretical and analytical justification based on the
author'£~ effcrts at curie fitting existing pilot rating data. Unti specific
tests have been conducted to validate this criterion and its variation with
the parameter the Reference 5 criterion will be used.
Another approach to measurement of this type of coupling is through the
laG in heading response, T~ , as suggested in IReference 11. Thlis suggestion
has merit since the indications are that the primary piloting problem arises
0
a3 not from the sideslip itself but rather from its effect on precision of
heading control. Again there is insufficient experience ;ith this criterion04; to propose it sa a measure of commiercial STOL hlndling qualities.
REY'/ No. FLA--.aON;o.REV SYM1 -
pAGE 17i
r 7.3 I~_ateral__ DietcnlCos oplri .,
II
f-

I .
0
However the sideslip critcrion ii proba&ly a poor indicat'or of
pilotin,: problems for airpl.nc confi`aturations ha-ving hiih v alues ( d
or acdverse vyaw f'iue to ailron (See nefer .ce ?iC. In t(ese caLses; I,cn' nredc..i.nanz
heandling cqualitics deficienCy is in control of' the resultzi, oscillatory banh-
cngle response to pJlot irnputs. Pilot opinion data has been' cor-elatcd
(;ieiference 3) to the rarase-eter (Posc/Pay) in response to a nul.se input; on t.he
controls, and this is the criteri.on chosen here. The variation of (~osc/Pa~;)
allo<red with thle sideslip 'hasing parameter is sho.m on Fi-ure 7,3-1 and
is quoted only for the case of positive dihedral effects since this is a
further requirement stated elsewdhere in this criteria doeument.
The possibility of reauirements limiting lateral accelerations felt in
the cre-w antd ra.senger cabi.rs due to operation of the yaw aznd roll co.ntrols
arises from consideration of the large yawing moments from lateral controls on
higth lift wings, and the nossible use's of high 6gain w.heel-rudder interconnect
systems for good handling qualities. Specific cr.iteria ca-n-ot be cuoteld untzil
the subjective effec.ts of "jerk" and accelerati.on levels are separated and
understood.
00.
o
REV SYM ______ .l ...M1 NO . D5-L4Ch8.)'
|PAGE 179179

I
req))
.L :Y: -.
I_s~
~~
~~
~~
S:!-
bctQ).u.
Q00 N..)003 L0 OQJ
::
! .
.. ;
...,....,_
-'.
.t
.. .,
... ..
.. ...
._.
...
·: '-
· !
............... :
....
.. ...
.... -
.,
ll
·:.... ..
d .__ d
o o
..............................:
._. LATERAL
DIR
EG
£tIOtA
L CRO
SS- COUPL/IG
I~~
~~
........ L
.......... C
RI F
ER
/A
-
i.' ..... !-
......... .
-...
-~
...........i F
OR
BSzNK
AN
CC
E
O$
CZ
L L
/tTO
A F
S
!~~~~~~~~~~~~~~~~~~~~~~~ ·---- -· -, ----i ·· -
*!?; ..i .
....... .....
_ ........ ....
u)zCF2 _J-JU... J
zdZZ'
K!-.
kZ-
I- t3_.)
I,,
1,, kujf--
1z:Z
D6- 4o04S
FIG
. 7.3-1
1.O.)
1
i
I
..... ".
[.
i:"
..
! I
' C
" \

8.0 LE ' Ts "-D IOL, :"TiTY
8.1 Gencral
8.2 Roll *'~oile Tir.-e Const mnt
8.3 Spiral Stabilty
8.4 Laterl;1-Diractional Static Stability
8.5 Lateral--Directiolnal Dynasic Stability
~'~.~JP~'] No. ',I ,NO-.10G)
PAGE 181
Pa -,
182
1c2
183
184
184
,8
r,0
o
o
0
o
0
REV SYM +

8.0 LS.. ..T.L-DICTIOI,;AL STABILITY'
8.1 Gencral
-At by::i a:L Ui'L landin;¥ s>jeed:i the in1er.eLaia.,cirL s m etn bceetCn lateral-
directional control now"er and stability are even more imrnortcet than usua]..
The cross-couplirg bet-ween controls, and the ir.ertial and dynaJncic cross-
coupling, become dominant iterms in determrir,ihg airulne response. Tyvicali3¢
criteria are w·ritten for specific response pararaeters i isolatioh, but it is
i-xortant to understa.;nd that the successful airplane meets all the criteria
in con!b:Iination anld also does not lie close to any individual bounldearies. For
exanple, it is entirely possible to .meet the roll mode time constant criteria
by the use of auw-.aentation at the expense of reasonab3le roll control powzer,
but this must be avoided by designing for both requirements together.
8.2 Roll Mor. Time Consftant
Critrieria: The effective roll-mode time constant,t R4 1.0 seconds, as
measured in res.onse to a step input of the pilot's lateral cont;rol s Other
criteria quoted ensure an essentially sin-le degree of freedom roll responceo
Discussion: The real criteria here must include the effects of control
system mechanization (actuation lags, rate saturftion, etc.) as w;ell as air-
plane d&ynamics. The total system damping is the narrmceter which will affect
the pilot's precision of control in turning and maneuvering flight. As
discussed in Reference 7, it is difficult for the pilot to distinguish between
excessive control lag and low aerodynamic roll damping. Either will produce
a requirement for large lead equalization from the pilot in order to prevent
bank angle oscillations when attempting to stabilize at a desired bank angle.
The available exmerimental data relating pilot opinion variation to roll
C mode time constelt has a fairly broad band definin the division of acceptole
and satisfactory handling qual .ics ( R - 1.0 4*2.0 seconds.) Very short
aE, _......,,""REV SYM . .. . DcS-40".09
PAGE." 182

natural tim.e constants are gen.erally avoided because of the possi._liz' of
lar:ge accelerations bei.ng prcduced in gusty conditions. Ti-h STL coi.. ratio.s
.of' ntie Des-ent s-tuy has,. "-tuxa." roll ul. ie *id con-s;ar;is of -lr ma.e.y 1.2
seconids. Rol.d. dia-ing ar)cnencta tion redaced t,i~.s to about .4 seconds, this
value being- chosen n conjunction with the roll control sc nsitivity for ortimu
n~lot rating, as shown in 1--ferenrce 12. No adverse co:rzients fwere gencrated due
to accelerations in gusts although these were simulated by thre large lateral
mootion excursions available on the six derree of freedom FSAA motion si.mulator.
There is, however, still some doubt as to the realism of the turbulence
siaulation, especially in the roll axis.
The reauirements for accurate control of bank angle are likely to become
mere restrictive for the STOL approach because of the rapid heading chlcges
that can develop for small bansi errors at these low speeds. The criterion was
therefore chosen at the low end of the uncertainty band.
8.3 Spiral Sta'bility
Criteria: With the aircraft trimmied for wings-level, zero-yawvr-rate flight,
the soiral characteristics should be such that with the lateral control free
and following an intentional smail bank angle input ( = .00) no increase in
bank angle build-up is desired; however, in no case should the bain angle
double in less than 20 seconds. In addition, there should be no objectionaole
coupling between the conventional roll and spiral modes.
Discussion: The form of the Reference 7 criteria is used to deliberately
include the effects of flight control system characteristics, lateral-directionaL
trim changes writh speed, and possible lateral trim changes due to fuel slosh,
etc. Too much positive spiral stability is undesirable because of the large
wheel reauirements in steady turns; too little stability will require constant
pilot attention to prevent the rapid buildup of large heading errors. Neutral
stability is therefore desired, although a reasonable alount of instability
REV SYM .,,D,'-:".''.C., | No. D-40(,'-
| PAGE13
183

will remnain satisrf.ctory. The present study a.irolanes had neutral soiral
stubilitjy with -au._.ntation, and were sli.ghtly stda;le (tl/2> 3 secs.) for the
baroie n ix s iZ rne.
Cr;iteria: Static directional stability is retuLired, and ;rill be demon-
strated by the tendency to recover from a yawed co!d.ition rith directional
controls free, Static lateral stability is recuired and will be dem..onstra.ted
by the tendency to reduce bank angle from a steady yawed condition when t.nhe
lateral controls are freed. !owever, the static lateral stability may be
lilited by the recuirements of Section 7.2.2.
Disc.ussion: Other criteria are specified under lateral/lirectio.al
dy.namic stability which nay be more restrictive than this si?:mlre requirement
for recovery frcm skids. However, this is an easi.l denonstrated chiaract4er-
istic and one which is clear in it's mes,age to the pilot. This cualitative
check on static stability is th.erefore recui.ed in addition-to the cua.ntita-
tive requirements for steady sideslip characteristics, Dutch roll frequency,
and spiral stability specified elsewhere.
8.5 Lateral-Directi.cnal Dyrnaic Stabilittr
Criteria: The lateral-directional oscillation shall have the followinrg
characteristics with controls fixed or free:
Dutch roll dwmping ratio, g D - .08
Dutch roll frequency, S h) > .04 rads/sec
Discussion: The Dutch roll dariping requirement is exhaustively dis-
cussed in lefefcznce 8. Whlat little e;perimental data thiere is on the re-
quirements for a minimum Dutch roll frequency for STOL airplaycs is open to
several interpretations. However, enough unfavorable pilot opinion data is
available (fReference 5) to cast douot on the level of i- = .25 rads/sec
set by Reference 8. For the purposes of this criteria document (i.e., gcod
REV SYM NO. L)XIO'PACE 1, 4
o
o
o
o
0
00
I-
00
+
V01
I
i
I
a

lhandli':; (qualities for co:xrercial op:rations) a conservati-c estiJ.;ate as"
made for this requLirc:icnt of '.il.D) ) .40 raz s/:sec or T'D 4 15 see s., rey;ard! ,s
of dappir ng ratio.
nnrc.>zydc NO. D&-40409
PAGE 185
I
To
o
so
To
To
II
C0
0
REV SYM
I
I

9.0 CO.i.,-;\J;O N OF' CiL0 ; AT3-IE !F'lO`,: LIT;E-T£U; S, 3U]rVLr '
The 'foll*o.-inC paGes are the result of a literature sr,-vey of existing
cormrSrcial transpor t airplncIes, riliitar% air2.ancs, anrd i'OL research air-
plamnes. Tile criteria were su:-z ,rized and presen.'tcli side-by-side I'or easy
compa.i.son. The resultin] datla were used to influence both the organiztion
and content of' the criteria nronosed in this docLLment.
'J'7ApW ,:.-9 ~ No. DU-_40',o
PAGE 186
00
0
REV SYM,4 +
I
I
I
0
r·

:,iI
4"
I \L
v
I
I I
I ia
~~
~~
~~
V
-h
.. -
L.4
.4
hh
a
.'
Z
Pa~~~~~~~~~; ,~,.
PD8ai
' i
0O~
e
.;-o
s ~
~~
~~
~~
, ".j
5 .~
~~
*''.
"~
.?
%%
-'
..
~I0
.4
. 00
'0
~a,,,.
~.~ .
, .~
;*~
~~
~-4
o.r
.~
94 iA
A
A-A
9
. la
U,
·a~
~~
~~
~~
~~
0o0 -0. W
.SU.
I9a4
&I|
a.u
a
R
9
I 'I
4
aIAA'i'A
.
4.
6. I
I .a..,
'"'
b -
j
.} .5
" _
A
o A
AA
I.. I.
.L'2
944
e.G
A
.5-
' a0
, .
Jl .
0 , .
--
8 .4 0
I .0
U
.1
>
o X
o
'.:' .. ..
.. ILg.080Z
.a 4
e _a C
*-, I
4.
".
.40
-_
ocu
s 6:I0 0
-0
:0 .
3 '2:la
o _i
4ub
"a
S.4
.94 !
940.0 00 a f
0k E'
04 oNa'a 0Ul
0-t0
0 °
.C
v
.a
.0la
o.Ie}M
0.a.
I.0A
0~
~~
~~
~
.4 '
.. .
-.1
O.0
i *.. L
=
4. ao
.Ne k
e
o j
.o
* m
ll
oo-,,o.!,§ .
., .
· i i.
.j
'et C: ~
-0.
AA
~~
~~
34
.94a ,~~~~~~~~~~~~~~~~~~~~~~~~~~~
'~~~~~~~~~~~~~~~ ,
94 0
~~
~~
~~
~~
~~
~~
~~
~~
~~
025~
~~
~~
~~
~~
~~
~~
~~
5 2
.
ao
d 2
'4
.13 3 I
a s
S~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~I-
.~~~~~~~~~~~~~~~~
,-' ,
., ....
] 5!
3
· .'0
0 'I
.,,04-(,
·~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
'-A
ITM
M
O-'
J
ar~
~~
~~
~~
~~
~
a~~~. A
.· v
..
=:. .....
V >
94 8 0
-0
T
..' 0
0
25 ~~~~~~~~~~~~~~~~~ c n
~ ~ ~
~ ~
~ ~
~ ~
~ ~
~ ~
~~
~~
~~
.:l.~
> ",O
A
A -
L
·r
'- '-
..i.944
.~ "
""
. ''
,," ~ l~
: -,,~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
It
I~~~~~~~~~lal~ ~~~~~~~~~~
oaa.~'
* -
..
P .
*
c
o-
B
.- tu;0
10~
-'.4
0
F.4
~~~~~~~.·~~~~~~~~~~~~~~~~ ~
~~
~~
A
A
C
V
O
~ UAOY
094
=S
940
O
Y·-(
-. O
u C
a
6I. *
.~4
0LC
44 4
o Y
·0L
a
·~~ar O
t~
*
00 .0
I IV
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
00
94 94
..
.0*
* a
V.
' 4.
ns..
0
mu
r ao-
.o
45
6
;* a.
4. 0rrru
'O
14 0~~~~~~~~~~1
964 .
L
O0
v eiC
A
%a~~~~~~vr-reL
rrD
~~~~~~~~~~~~.> 1
w.0. a'
' 2~
L
'
...+0
a 8
0C
V
00~
.V
49
4
* C
.*.
W la
.' O
00~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~
0 C
'. M82.C'.
~~ ' ~ ~ ~
0~
r,~~
~~
~~
~~
~~
~~
~~
~~
~
..
4
l a
9 .
f4 ,
....
A Z
a 2
a
4 W
. Il
-
00
us .0
) os
U a
Iu'
C' .O
,
-u
.~~
.
2 ~ ~ V
a0V
,
Jt
4 W
l
t .e
:,,
-A
M
P
P
0
-
mo
2
~~
~~
~~
P~
~.4
a
I a
'06 +
0,
*n
I\04,494849
-- 0
4 -
.P ~ ~
~ ~
~ ~~0-
04P9
a 0..
05
-4.
-~
~
&
X
,~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
.. C
a,
..2'w
o
0.2
·~
~ ~
S~
·"
* h
A
A"~~~~~~9~~
84 0
-,4~,
,~I~
B
4. f.
*
4 I
.4S
..a
4,.
1
4.
4 , a 4,0: '
A 4
o* I
m
I
0I 2U91
M., '-gg a o
.a I...4
.
I 0~~~~.*
VO
as·4
0'0
U III
.a.
I 3
05
,x
L e
o--4--
-
+ t IE
Z;.
2C
.I
C
· .o
.
-4 .o
a -.
3 .4u
C-' ..
.2 2
8 '/ .
.,
+
, ,
.,
fl '
4 .
='
| 0
94~~~~~~~ ~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~
~ i i
i
i~i
.0*8
.4 L~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
~~
I.
a .
o '.
<4,o
.
u an
OC
=M
A5- _
.,944
-=.-
9 0c.
'on
O
0C
00.4.34
A
~..dA
m.1
I
I I .
, '
" ..
V
I *
._
r4
A,!
-I3
$5l..
,*..
%aW _~ D
,* b
,
0.4
a._ V
.2,°.0. _00 _
eme:
e n,
·
La
3094-
y 0040
o..
' 0 4 3 .
0.4
)
0-
C
.09'
0Co
* e4
e,
.00
I S e V
c0
00444.
-.
e
8. .0.5oA
e
o40-c 4,).
0.5
0-
.4400oC
O ~-a
I
.!.'.i','>:.'
..0L/_o __
i'
Lu I,/' i -iII .I
''II
IL
r .I
ALI
I1.IiIIIIIL
Ii
IIIIII
I
i
.. -I ..
I
!-
_ a
.IIIIIIia O
i
a .
A.
"te?'
__

Page intentionally left blank

Page intentionally left blank

Page intentionally left blank

Page intentionally left blank

Page intentionally left blank

Page intentionally left blank

Page intentionally left blank

Page intentionally left blank

Page intentionally left blank

Page intentionally left blank

Page intentionally left blank

Page intentionally left blank

10. O RV:F:IWTR:'CZS
1 . C -
2. AAI ' 70-124), S'i;, Defin:.tirs and Field len.,]t Cr. i: er :a,R. K. Rlansome, C(:tober 1970.
3. AFL ",-C\'.-9-72, .cknr;rosu.-nd Inforna.tion and User Gulidefor 'I- ' 75 3 (.
Military Srpcificartion - Flving Qualities of PilotedAirplanes, C. R. Chalk, 199(.
4. hCL50/5.30-8, Planninr and Design Criteria for ', troo1 itanSTOL Parts, FA, :November 1.'970.
5. 2INASA TI'~D-559 4, Air-orthiness Cons;derat.ions fonr S'- OLAir.:.raft, R. C. Innis, C. A. Holzhauser and ;'. C. .. ui.;..-e.y,
Jan' :%- 1970.
6. Special Conditions att-ched to FAR Pa:re 25 for Ci'.if-ioatio'of the Breguet 941, October 27, 1969
7, ACA;_.::.-R-577-70, V.SOL Handlling, IT CrLteria and Discussio.n,
8. AF.'FD)L-T7-7O- 8, Pack-..round I:nfor.ation and ITer ,;. ide for!41L--,P'533 ..................... ;iri> tio"- O~ , Qalities of '..Piloted V/S-'L AiC-r.' t, C. R. C'.allk et l. _ *' 'l1971.
9. AGARD Report Nio. 358, Factors Li.miting the i -a: "di r .. A..r.r.t:hSpeed of Airpl :.es From the Vie'wpoint of' a Pilc;, .. C. I.is,April 1961.
10. NASA TN.D-2451, A Piloted Motion Sim.ulator I.nvzt s.. ticn ofVTOL Height Control Requirements, R. M. Gerdes, A.uust i3: !.
11. FAA,-RD-70-61, A Flight Si.mulator Study of STOL 'ITr-ansrt
Lateral Control Characteristics, D. E. Drake et al.,September 1970.
12. ICAS Paper 70-55, The Effect of Lateral Control Ncn-_li-.niari;eson the ?Hndling Qualities of Light STOL Air-raft't ' Fi;.lt
Simulator Study, D. P.. .,adill et al., Sete:;ier 197,0.
13. AGARD Conference Procedings No. 59, Aircraft Landing Systemns,September 1970.
0
0
REVSYMPA GE
-5