
seminar.uny.ac.idseminar.uny.ac.id/simposiumkrsbi2014/sites/seminar.uny.ac... · Web...
7
IMPLEMENTASI MICRO SWITCH PADA GERAK JATUH ROBOT BIOLOID TIM ROCCER UT Jusman 1 , Muh Surya Akbar 2 , Ayuni 3 Fakultas Teknik Jurusan Teknik Elektro Universitas Tadulako Palu Jalan Soekarno Hatta Km 9 Kampus Bumi Kaktus Tadulako Tondo Palu – Sulawesi Tengah 0451 – 422611 [email protected] Abstract The main components of these robots as well as the brain of the robot is driving the CM 530 (ARM Cortex M3 / 32bit). CM 530 can communicate with a computer using a mini- USB devices are on version that was formerly CM510 using USB2dynamixel. All devices such as actuators, sensors, and buttons are connected by the CM-530. To program and manage all processes running robot using RoboPlus program which is a program that is compatible with the production Robotis CM - 530. In this humanoid robot some micro switches mounted on the body and the back of the robot which is to help the performance of the gyro sensors in determining the position of the robot. Keywords: CM-530, Humanoid Robot, Micro Switch 1. PENDAHULUAN Perkembangan teknologi robotika pada saat ini sudah sangat berkembang. Dimana berbagai macam robot banyak difungsikan untuk membantu pekerjaan manusia. Seperti mobile robot, flying robot, underwater robot, manipulator robot, robot berkaki, dll. Salah satu aplikasi robotika yang cepat berkembang yaitu robot humanoid. Robot humanoid adalah robot dengan bentuk menyerupai manusia dimana memiliki struktur umum dari tubuh manusia, seperti dua kaki, dua tangan, tubuh, dan kepala . Sebuah robot humanoid memiliki potensi untuk melakukan tugas-tugas dalam lingkungan manusia. Selain itu, robot humanoid bahkan dapat menggunakan alat yang dirancang untuk manusia. Pengembangan Tujuan dari robot humanoid adalah untuk membuat sebuah robot yang berpikir dan bertindak seperti manusia. Pada akhirnya , robot humanoid akan melakukan pekerjaan manusia, dan manusia dapat berkonsentrasi pada kegiatan lain yang lebih produktif. Seperti robot yang akan dibahas pada makalah ini yaitu robot humanoid yang dapat bermain bola layaknya seperti manusia. Robot humanoid pemain bola umumnya hanya memiliki 3 gerakan dasar dalam berjalan yaitu gerak lurus, gerakan samping dan gerakan memutar. Pembahasan pada makalah ini yaitu tentang gerak jatuh robot Bioloid Premium Kit.
-
Upload
nguyenkhanh -
Category
Documents
-
view
215 -
download
0
Transcript of seminar.uny.ac.idseminar.uny.ac.id/simposiumkrsbi2014/sites/seminar.uny.ac... · Web...

IMPLEMENTASI MICRO SWITCH PADA GERAK JATUH ROBOT BIOLOID TIM ROCCER UT
Jusman1, Muh Surya Akbar2 , Ayuni3
Fakultas Teknik Jurusan Teknik Elektro Universitas Tadulako Palu
Jalan Soekarno Hatta Km 9 Kampus Bumi Kaktus Tadulako Tondo Palu – Sulawesi Tengah0451 – 422611 [email protected]
Abstract
The main components of these robots as well as the brain of the robot is driving the CM 530 (ARM Cortex M3 / 32bit). CM 530 can communicate with a computer using a mini-USB devices are on version that was formerly CM510 using USB2dynamixel. All devices such as actuators, sensors, and buttons are connected by the CM-530. To program and manage all processes running robot using RoboPlus program which is a program that is compatible with the production Robotis CM -530. In this humanoid robot some micro switches mounted on the body and the back of the robot which is to help the performance of the gyro sensors in determining the position of the robot.
Keywords: CM-530, Humanoid Robot, Micro Switch
1. PENDAHULUANPerkembangan teknologi robotika pada
saat ini sudah sangat berkembang. Dimana berbagai macam robot banyak difungsikan untuk membantu pekerjaan manusia. Seperti mobile robot, flying robot, underwater robot, manipulator robot, robot berkaki, dll. Salah satu aplikasi robotika yang cepat berkembang yaitu robot humanoid. Robot humanoid adalah robot dengan bentuk menyerupai manusia dimana memiliki struktur umum dari tubuh manusia, seperti dua kaki, dua tangan, tubuh, dan kepala .Sebuah robot humanoid memiliki potensi untukmelakukan tugas-tugas dalam lingkungan manusia. Selain itu, robot humanoid bahkan dapat menggunakan alat yang dirancang untuk manusia.
Pengembangan Tujuan dari robot humanoid adalah untuk membuat sebuah robot yang berpikir dan bertindak seperti manusia. Pada akhirnya , robot humanoid akan melakukan pekerjaan manusia, dan manusia dapat berkonsentrasi pada kegiatan lain yang lebih produktif.
Seperti robot yang akan dibahas pada makalah ini yaitu robot humanoid yang dapat bermain bola layaknya seperti manusia. Robot humanoid pemain bola umumnya hanya memiliki 3 gerakan dasar dalam berjalan yaitu gerak lurus, gerakan samping dan gerakan memutar.
Pembahasan pada makalah ini yaitu tentang gerak jatuh robot Bioloid Premium Kit. Dimana robot tersebut sudah dimodifikasi sedemikian rupa agar dapat bermain sepak bola layaknya seperti manusia.
2. Sistem Penggerak Robot
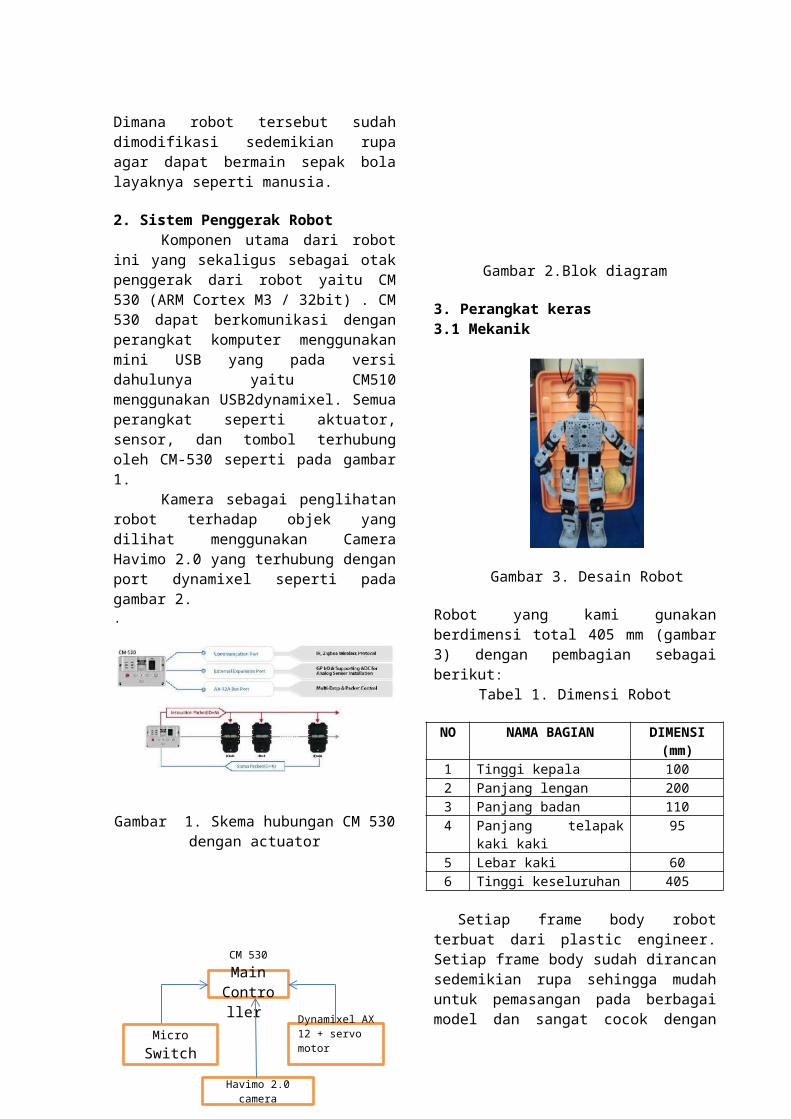
Komponen utama dari robot ini yang sekaligus sebagai otak penggerak dari robot yaitu CM 530 (ARM Cortex M3 / 32bit) . CM 530 dapat berkomunikasi dengan perangkat komputer menggunakan mini USB yang pada versi dahulunya yaitu CM510 menggunakan USB2dynamixel. Semua perangkat seperti aktuator, sensor, dan tombol terhubung oleh CM-530 seperti pada gambar 1.
Kamera sebagai penglihatan robot terhadap objek yang dilihat menggunakan Camera Havimo 2.0 yang terhubung dengan port dynamixel seperti pada gambar 2..
Gambar 1. Skema hubungan CM 530 dengan actuator
Gambar 2.Blok diagram
3. Perangkat keras 3.1 Mekanik
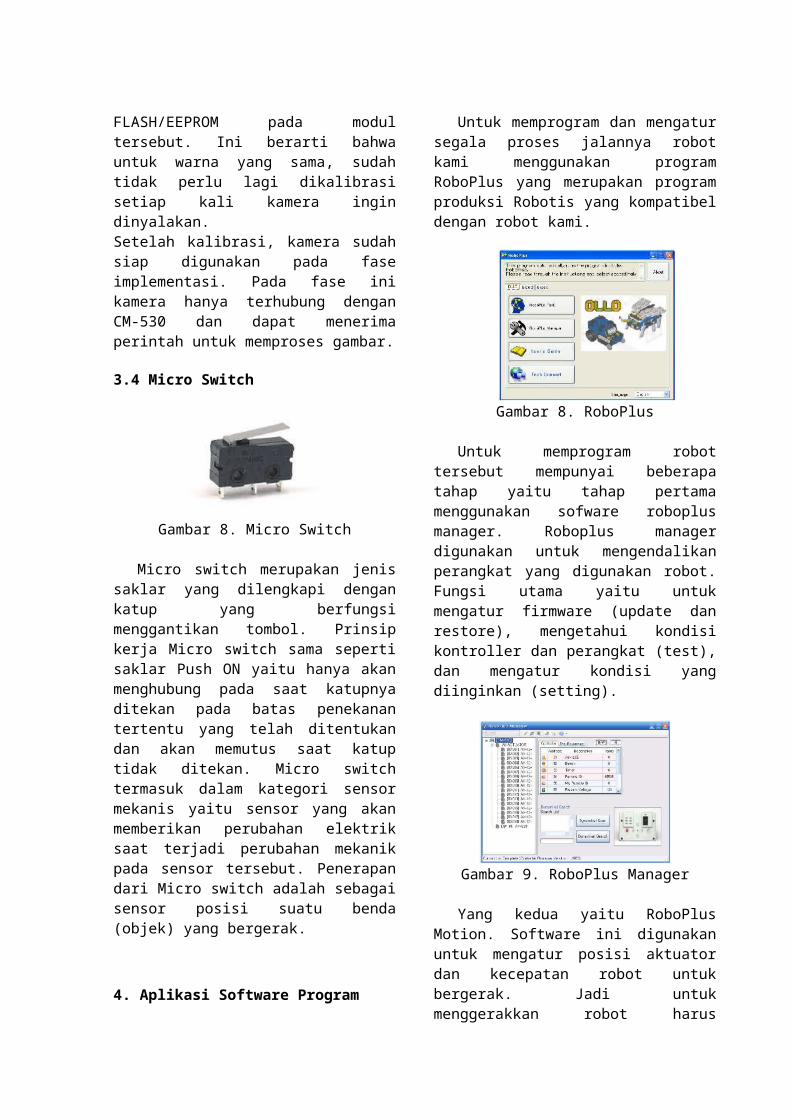
Gambar 3. Desain Robot
Robot yang kami gunakan berdimensi total 405 mm (gambar 3) dengan pembagian sebagai berikut:
Tabel 1. Dimensi Robot
NO NAMA BAGIAN DIMENSI(mm)
1 Tinggi kepala 1002 Panjang lengan 2003 Panjang badan 1104 Panjang telapak kaki kaki 955 Lebar kaki 606 Tinggi keseluruhan 405
Setiap frame body robot terbuat dari plastic engineer. Setiap frame body sudah dirancan sedemikian rupa sehingga mudah untuk pemasangan pada berbagai model dan sangat cocok dengan servo dynamixelnya. Tiap servo dynamixel memiliki lubang begitupun juga frame body untuk memudahkan pemasangan baut dan mur, yang melekatkan dynamixel pada frame body.
3.2 Aktuator
Gambar 4. Dynamixel AX-12+ Sebagai Aktuator
Dynamixel adalah aktuator yang pintar yang menggunakan roda gigi reducer, dan juga rangkaian yang presisi dapat mengirimkan data dengan fleksibel dan hanya dalam sebuah paket. Pada ukuran yang kompak, akan menghasilkan torsi yang tinggi dan terbuat dari bahan kelas tinggi untuk meningkatkan kekuatan dan struktur agar dapat bekerja pada tekanan luar yang besar. Dynamixel juga dapat mendeteksi kondisi internal seperti temperatur dan voltasenya (gambar 4).
Dynamixel juga dapat mengirimkan peringatan kepada pemakai apabila parameter berada pada kondisi yang diijinkan seperti temperatur, torsi dan voltase dan dapat menangani permasalahan secara otomatis seperti mematikan torsi Dynamixel AX-12+ bekerja pada sudut 300°, voltase 7-10V, temperatur 5- 85°C, kecepatan komunikasi 7343bps ~ 1 Mbps, berat 55g, rasio gigi reduksi 1:254.
3.3 Sensor Camera
Gambar 5. Havimo 2.0
Robot kami mempunyai sensor warna, yaitu Havimo 2.0 Camera yang terletak pada bagian kepala robot sebagai sensor warna untuk mendeteksi objek yang dilihat.Kamera tersebut terhubung dengan CM-530 melalui port dynamixel.
Micro Switch
Havimo 2.0 camera
Dynamixel AX 12 + servo motor
CM 530

Gambar 6. Fase kalibrasi
Gambar 7. Fase Implementasi
Terdapat 2 tahap untuk dapat mengoperasikan kamera tersebut yaitu tahap ‘kalibrasi’ dan‘implementasi’. Pada fase kalibrasi adalah untuk mengatur kamera sesuai warna yang diinginkan. Semua pengaturan akan tersimpan pada memori FLASH/EEPROM pada modul tersebut. Ini berarti bahwa untuk warna yang sama, sudah tidak perlu lagi dikalibrasi setiap kali kamera ingin dinyalakan. Setelah kalibrasi, kamera sudah siap digunakan pada fase implementasi. Pada fase ini kamera hanya terhubung dengan CM-530 dan dapat menerima perintah untuk memproses gambar.
3.4 Micro Switch
Gambar 8. Micro Switch
Micro switch merupakan jenis saklar yang dilengkapi dengan katup yang berfungsi menggantikan tombol. Prinsip kerja Micro switch sama seperti saklar Push ON yaitu hanya akan menghubung pada saat katupnya ditekan pada batas penekanan tertentu yang telah ditentukan dan akan memutus saat katup tidak ditekan. Micro switch termasuk dalam kategori sensor mekanis yaitu sensor yang akan memberikan perubahan elektrik saat terjadi perubahan mekanik pada sensor tersebut. Penerapan dari Micro switch adalah sebagai sensor posisi suatu benda (objek) yang bergerak.
4. Aplikasi Software ProgramUntuk memprogram dan mengatur segala
proses jalannya robot kami menggunakan program RoboPlus yang merupakan program produksi Robotis yang kompatibel dengan robot kami.
Gambar 8. RoboPlus
Untuk memprogram robot tersebut mempunyai beberapa tahap yaitu tahap pertama menggunakan sofware roboplus manager. Roboplus manager digunakan untuk mengendalikan perangkat yang digunakan robot. Fungsi utama yaitu untuk mengatur firmware (update dan restore), mengetahui kondisi kontroller dan perangkat (test), dan mengatur kondisi yang diinginkan (setting).
Gambar 9. RoboPlus Manager
Yang kedua yaitu RoboPlus Motion. Software ini digunakan untuk mengatur posisi aktuator dan kecepatan robot untuk bergerak. Jadi untuk menggerakkan robot harus menggunakan software ini, dan setelah itu file motion didownload ke robot.
Gambar 9. Roboplus Motion
Yang ketiga yaitu RoboPlus Task. Software ini digunakan untuk mengatur motion robot untuk menunjukkan aksi gerakannya. RoboPlus Task merupakan kode untuk mengatur logika pergerakan robot. Pada RoboPlus Task diatur bagaimana robot tersebut dapat jalan secara otomatis dengan menggunakan sensor camerasehingga robot dapat bergerak otomatis ke objek yang dituju. Task code juga mengatur kemungkinan-kemungkinan yang terjadi ketika robot dijalankan dan mengatur pergerakan robot sesuai dengan gerakan yang diperintahkan.
Gambar 11. Roboplus task
Jadi jika kita ingin membuat robot untuk berjalan, kita membutuhkan task code. Jika task code didownload pada robot dan menggunakan motion, kita harus mendownload motion file juga. Jika tidak ada motion yang digunakan pada task code, maka kita tidak usah menggunakan motion file.
5. ALGORITMA5.1 Algoritma Gerak Bangun Robot
Untuk gerak bangun robot ketika jatuh kami menggunakan tactical sensor yaitu micro switch sebagai sensor. Micro switch ini terpasang pada bagian badan dan punggung robot
Gambar 12. Posisi Micro Switch Pada Robot
Pada saat robot terjatuh ke depan maka micro switch beroperasi sehingga nilai value pada Port2 menjadi 0, sebaliknya jika robot terjatuh kebelakang maka nilai value pada Port6 menjadi 999. Algoritma gerak jatuh robot dapat dilihat pada gambar flowchart di bawah ini.
Gambar 13. Flowchart Gerak Jatuh Robot
Dengan kata lain perubahan yang ada pada nilai value menandakan bahwa robot dalam posisi jatuh. Dan perubahan nilai value tersebut yang akan dimasukkan ke dalam program.
6.KESIMPULANMicro switch yang terpasang pada
badan dan punggung robot hanya akan beroperasi ketika robot tersebut dalam posisi terjatuh.

7. DAFTAR PUSTAKA[1] ROBOTIS Co., Ltd. ROBOTIS: robot
actuator dynamixel AX-12+ Available from: http://support.robotis.com/en/product/dynamixel/ax_series/ax-12.htm
[2] ROBOTIS Co., Ltd. ROBOTIS: roboplus task software Available from: http://support.robotis.com/en/software/robopl us/rob oplus_task_main.htm
[3] ROBOTIS Co., Ltd. ROBOTIS: roboplus manager software Available from :http://support.robotis.com/en/software/ roboplus/roboplus_manager_main.htm
[4] ROBOTIS Co., Ltd. ROBOTIS: roboplus motion software from: http://support.robotis.com/en/software/robopl us/roboplus_motion_main.htm
[5] HaViMo2, Image Processing Module Available from: http://robosavvy.com/RoboSavvyPages/Support













![On the Use of the Humanoid Bioloid System for Robot-Assisted … · 2017-05-11 · In [25], the Bioloid was used to build a robotic arm for the task of drawing faces. This work is](https://static.fdocuments.in/doc/165x107/5eb00dcb00f9142b6314f6b7/on-the-use-of-the-humanoid-bioloid-system-for-robot-assisted-2017-05-11-in-25.jpg)


