
#? rahul swaminathan (T-Labs) & professor patrick baudisch hci2 hasso-plattner institute determining...
45
#? rahul swaminathan (T-Labs) & professor patrick baudisch hci2 hasso-plattner institute determining dept
-
Upload
collin-moody -
Category
Documents
-
view
217 -
download
0
Transcript of #? rahul swaminathan (T-Labs) & professor patrick baudisch hci2 hasso-plattner institute determining...

#? rahul swaminathan (T-Labs) & professor patrick baudisch
hci2
hasso-plattner institute
determining depth

two subproblems
Matching
Finding corresponding elements in the two images
Reconstruction
Establishing 3-D coordinates from the 2-D image correspondences found during matching

camera
scene
lighting
graphics
light
computer

computer
camera
scene
lighting
light
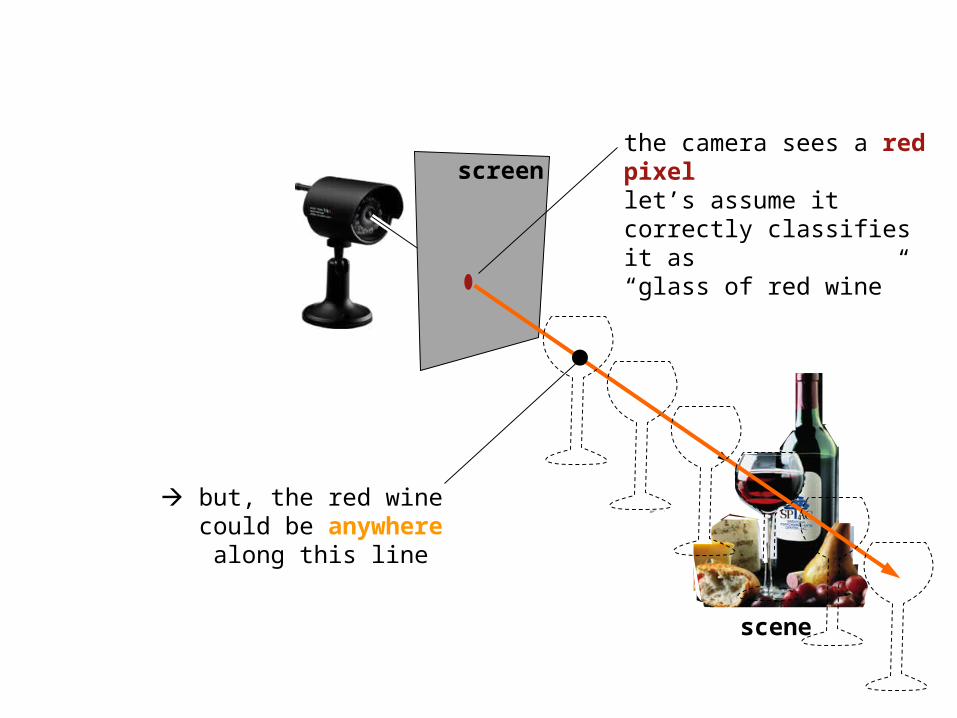
scene
the camera sees a red pixellet’s assume it correctly classifies it as“glass of red wine”
screen
but, the red wine could be anywhere along this line

computer
two cameras
scene
lighting
light
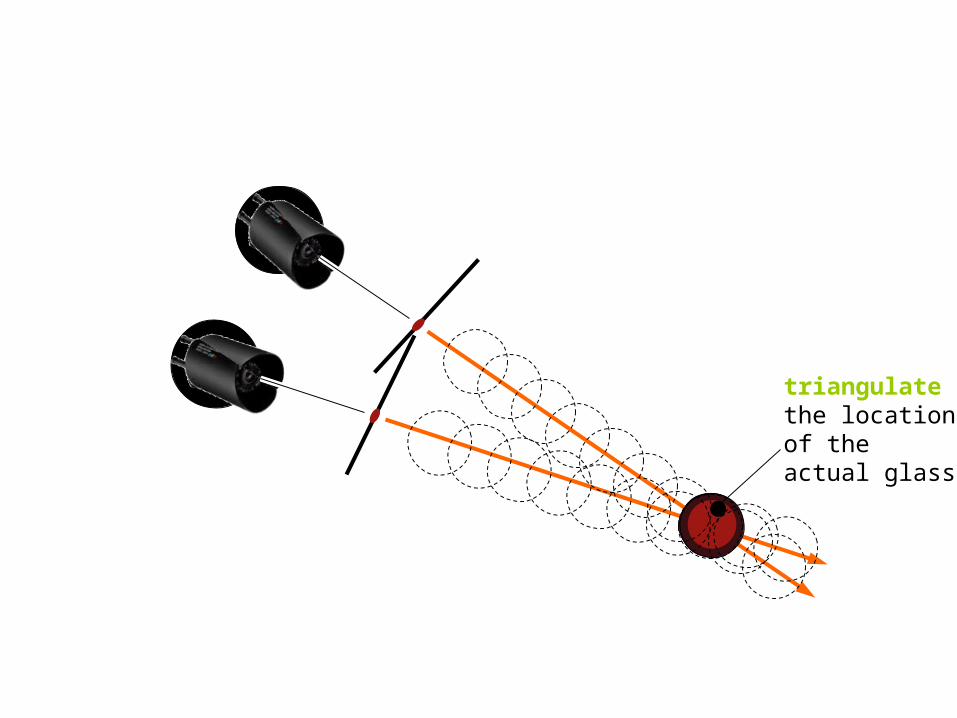
triangulate the location of the actual glass

wine glass
screens

two subproblems
Matching
Finding corresponding elements in the two images
Reconstruction: done
Establishing 3-D coordinates from the 2-D image correspondences found during matching
two subproblems
Matching: harder
Finding corresponding elements in the two images
Reconstruction: done
Establishing 3-D coordinates from the 2-D image correspondences found during matching


scene
Could we replace one camera with a projector?
<30sec brainstorming>
two cameras
lighting

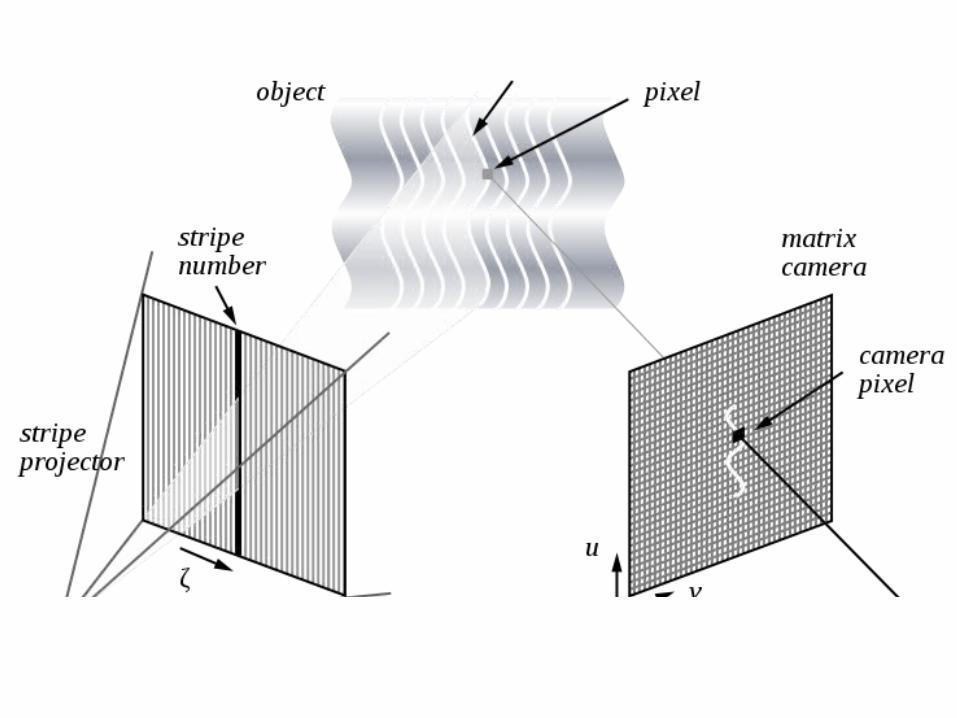
structured light ::the process of projecting a known pattern of pixels onto a scene


pattern is disturbed when depth changes
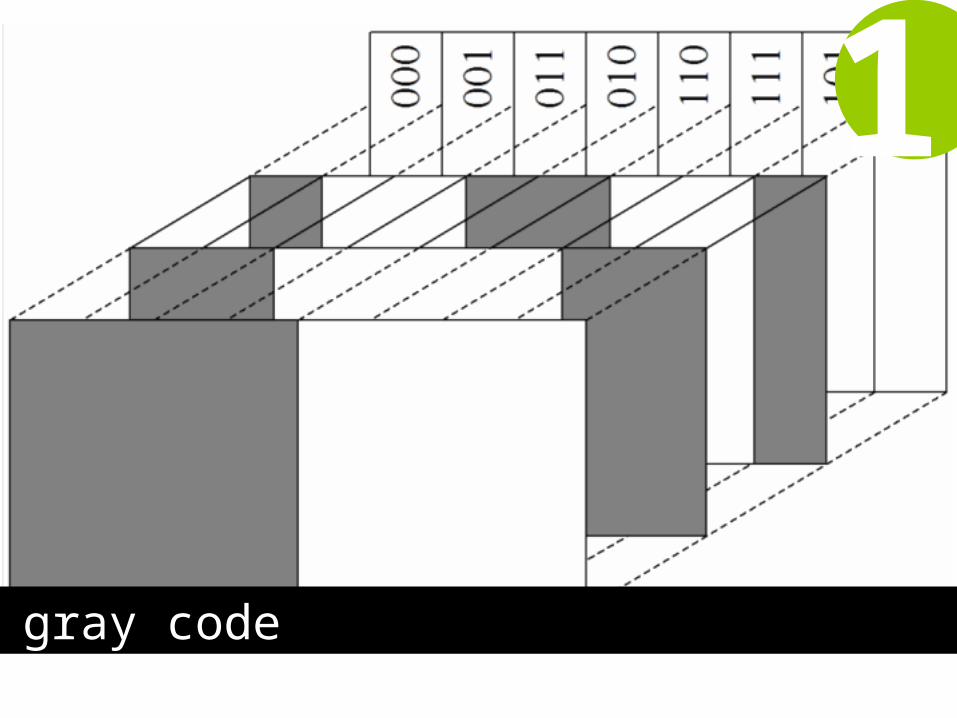
gray code
1
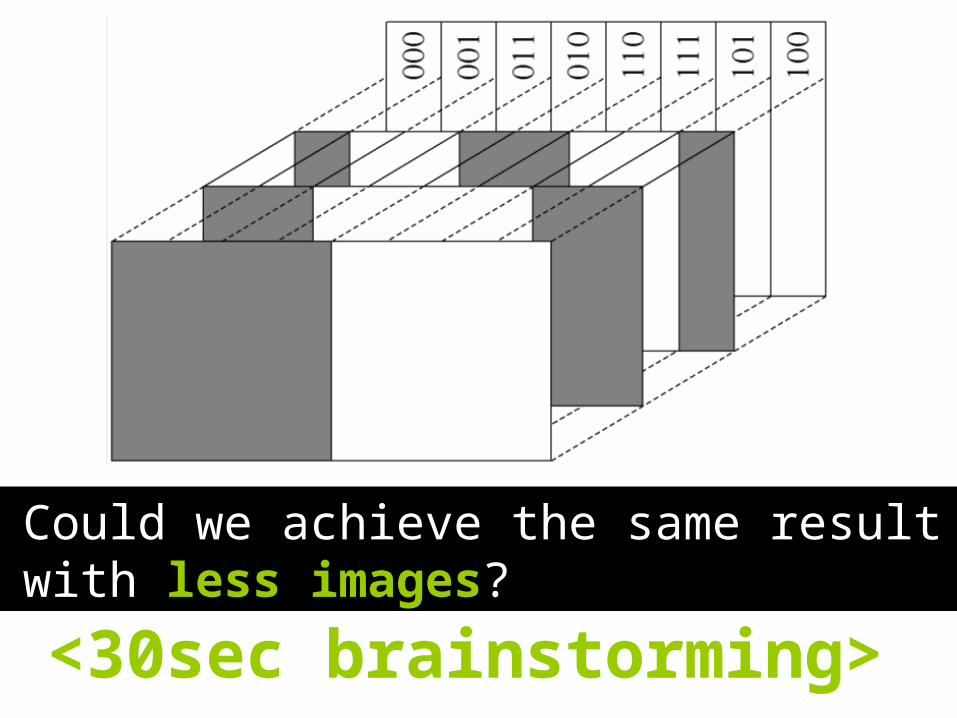
Could we achieve the same result with less images?
<30sec brainstorming>
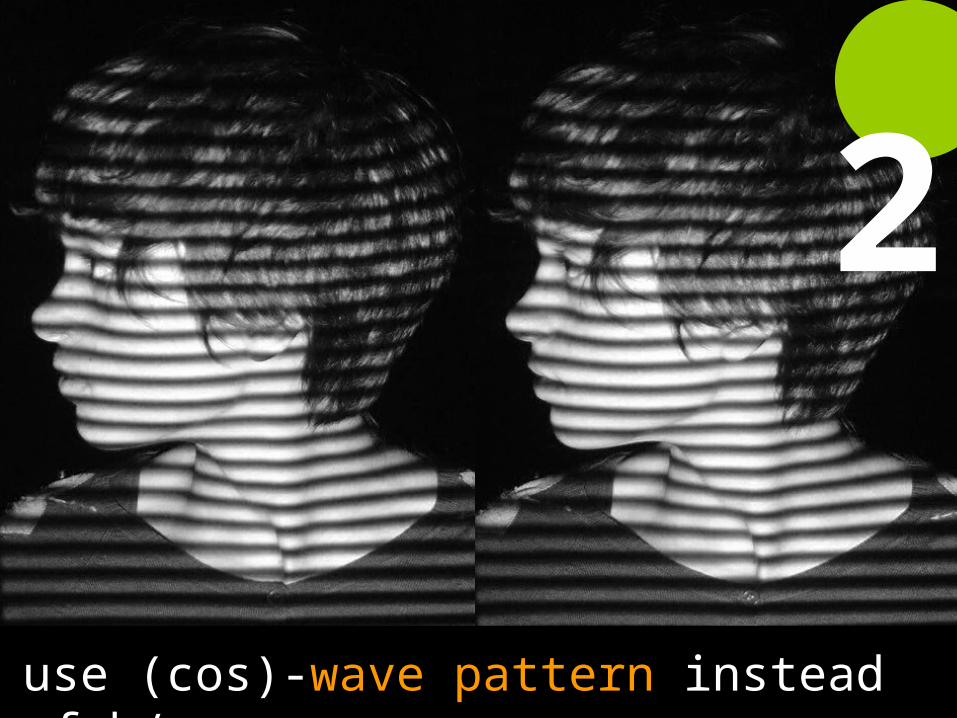
use (cos)-wave pattern instead of b/w
2

pattern needs processingcaveat

Turns out to be a not too hard problem: flood-fill algorithm already provides acceptable solution
continues gradientresult from both

Microsoft Kinect
3

Anoto pen
4

computer
two cameras
scene
lighting
light

main approaches
1.pixel/area-based
2.feature-based
problems
Camera-related problems
- Image noise, differing gain, contrast, etc..
Viewpoint-related problems:
- Perspective distortions
- Occlusions
- Specular reflections

camera positioning
baseline
More matching heuristics
Always valid:
(Epipolar line)
Uniqueness
Minimum/maximum disparity
Sometimes valid:
Ordering
Local continuity (smoothness)
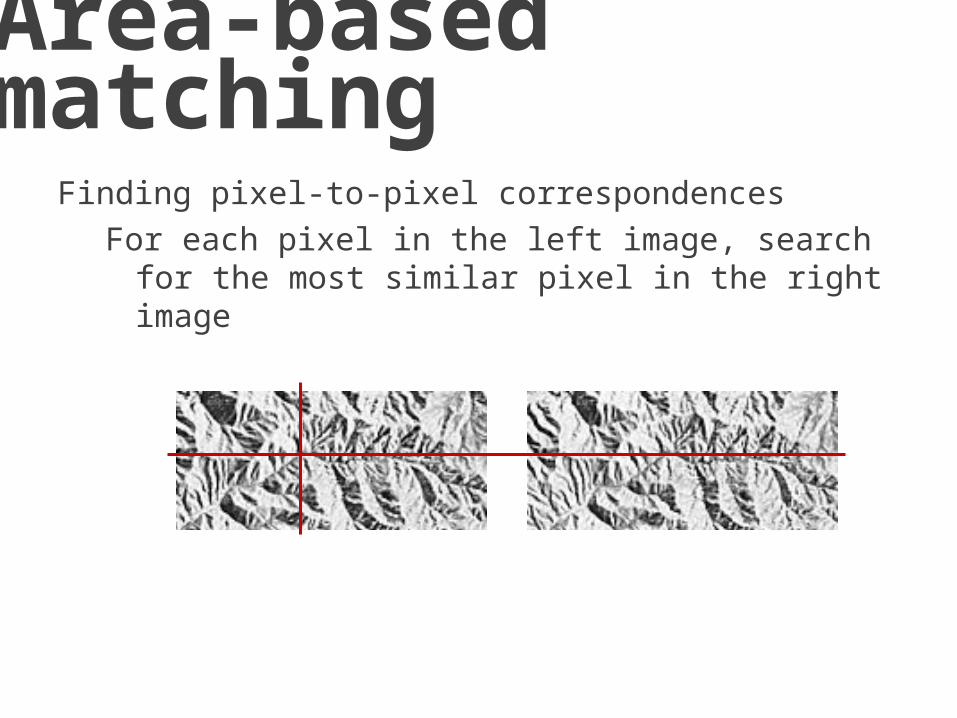
Area-based matching
Finding pixel-to-pixel correspondences
For each pixel in the left image, search for the most similar pixel in the right image

Area-based matching
Finding pixel-to-pixel correspondences
For each pixel in the left image, search for the most similar pixel in the right image
Using neighbourhood windows

Area-based matching
Similarity measures for two windows
SAD (sum of absolute differences)
SSD (sum of squared differences)
CC (cross-correlation)
…
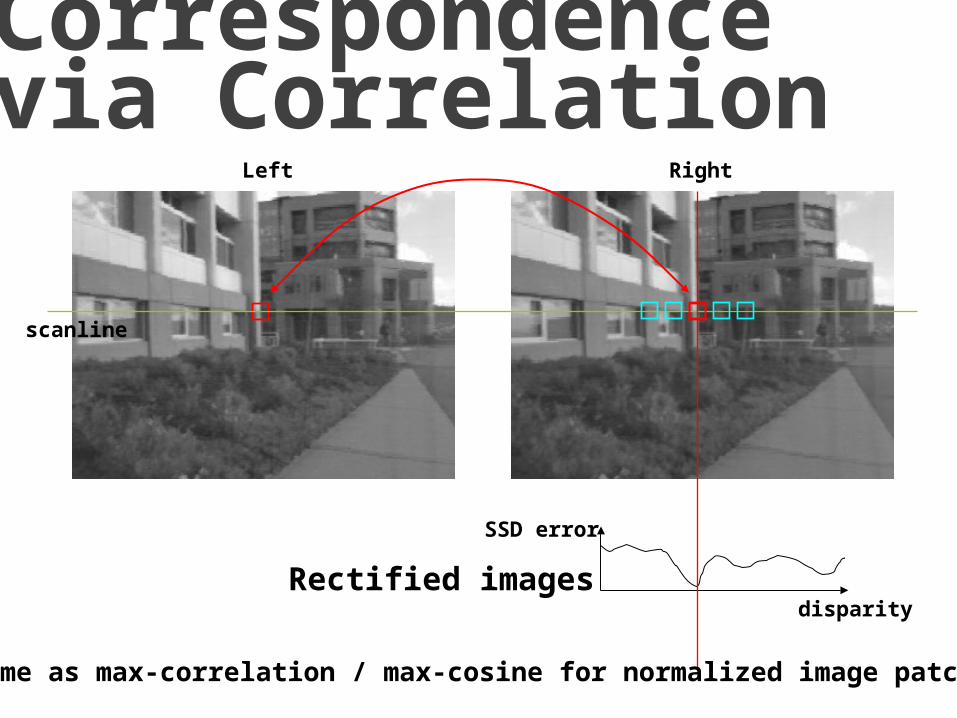
Correspondence via Correlation
Rectified images
Left Right
scanline
SSD error
disparity
(Same as max-correlation / max-cosine for normalized image patch)
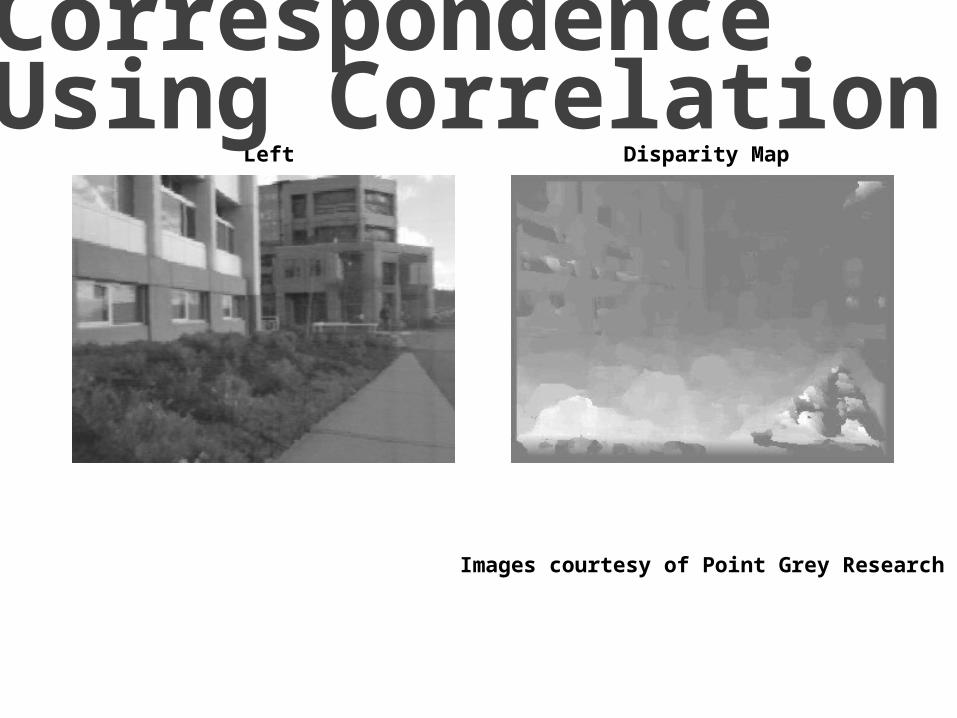
Left Disparity Map
Images courtesy of Point Grey Research
Correspondence Using Correlation

Image NormalizationEven when the cameras are identical models, there can be
differences in gain and sensitivity.The cameras do not see exactly the same surfaces, so
their overall light levels can differ.For these reasons and more, it is a good idea to normalize
the pixels in each window:
pixel Normalized ),(
),(ˆ
magnitude Window )],([
pixel Average ),(
),(
),(),(
2
),(
),(),(),(
1
yxW
yxWvuyxW
yxWvuyxW
m
mm
m
m
II
IyxIyxI
vuII
vuII
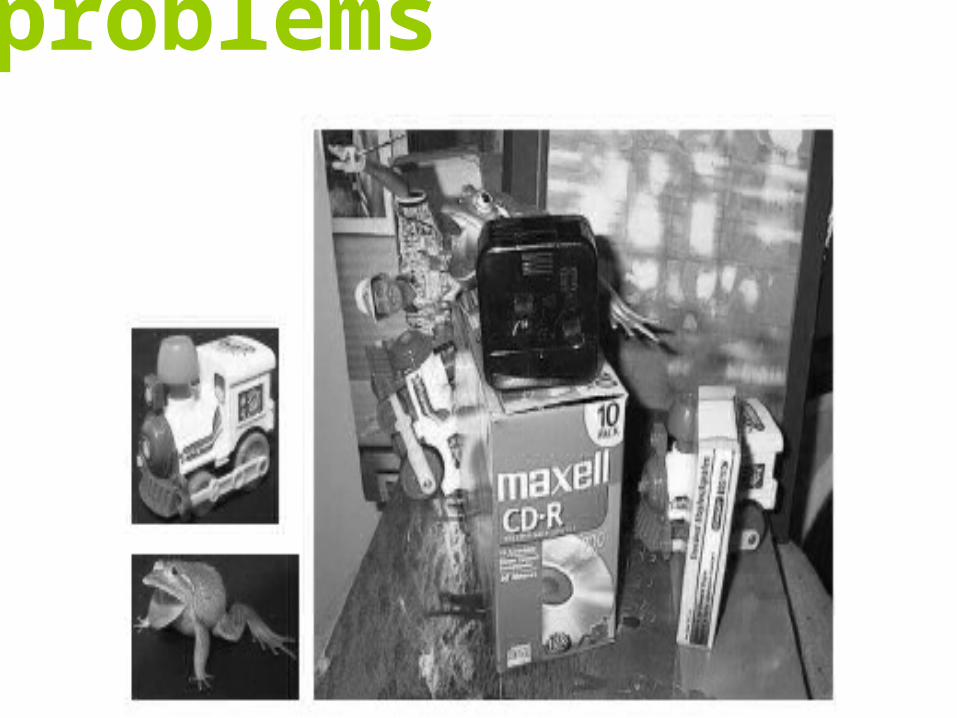
problems

problems
Scale change
Rotation
Occlusion
Illumination
……

result

combining both

wine glass
screens

the underlying problem is:compute the intersection of two lines

commonly compute “depth” image

end


















