
© Copyright 2004 Dr. Phillip A. Laplante 1 Performance estimation and optimization Theoretical...
40
© Copyright 2004 Dr. Phillip A. Laplante 1 Performance estimation and optimization Theoretical preliminaries Performance analysis Application of queuing theory I/O performance Performance optimization Results from compiler optimization Analysis of memory requirements Reducing memory utilization
-
Upload
anna-mcdowell -
Category
Documents
-
view
221 -
download
3
Transcript of © Copyright 2004 Dr. Phillip A. Laplante 1 Performance estimation and optimization Theoretical...

© Copyright 2004 Dr. Phillip A. Laplante1
Performance estimation and optimization Theoretical preliminaries Performance analysis Application of queuing theory I/O performance Performance optimization Results from compiler optimization Analysis of memory requirements Reducing memory utilization
© Copyright 2004 Dr. Phillip A. Laplante2
Theoretical preliminaries NP-completeness Challenges in analyzing real-time
systems The Halting Problem Amdahl’s Law Gustafson’s Law

© Copyright 2004 Dr. Phillip A. Laplante3
NP-completeness The complexity class P is the class of problems which can be solved
by an algorithm which runs in polynomial time on a deterministic machine.
The complexity class NP is the class of all problems that cannot be solved in polynomial time by a deterministic machine. A candidate solution can be verified to be correct by a polynomial time algorithm.
A decision problem is NP complete if it is in the class NP and all other problems in NP are polynomial transformable to it.
A problem is NP-hard if all problems in NP are polynomial transformable to that problem, but it is impossible to show that the problem is in the class NP.
NP complete problems tend to be those relating to resource allocation, -- this is the situation that occurs in real-time scheduling.
This fact does not bode well for the solution of real-time scheduling problems.

© Copyright 2004 Dr. Phillip A. Laplante4
Challenges in analyzing real-time systems When there are mutual exclusion constraints, it is impossible to
find a totally on-line optimal runtime scheduler. The problem of deciding whether it is possible to schedule a set
of periodic processes that use semaphores only to enforce mutual exclusion is NP-hard.
The multiprocessor scheduling problem with two processors, no resources, independent tasks, and arbitrary computation times is NP-complete.
The multiprocessor scheduling problem with two processors, no resources, independent tasks, arbitrary partial order and task computation times of either 1 or 2 units of time is NP-complete.
The multiprocessor scheduling problem with two processors, one resource, a forest partial order (partial order on each processor), and each computation time of every task equal to 1 is NP-complete.
The multiprocessor scheduling problem with three or more processors, one resource, all independent tasks and each computation time of every task equal to 1 is NP-complete.
© Copyright 2004 Dr. Phillip A. Laplante5
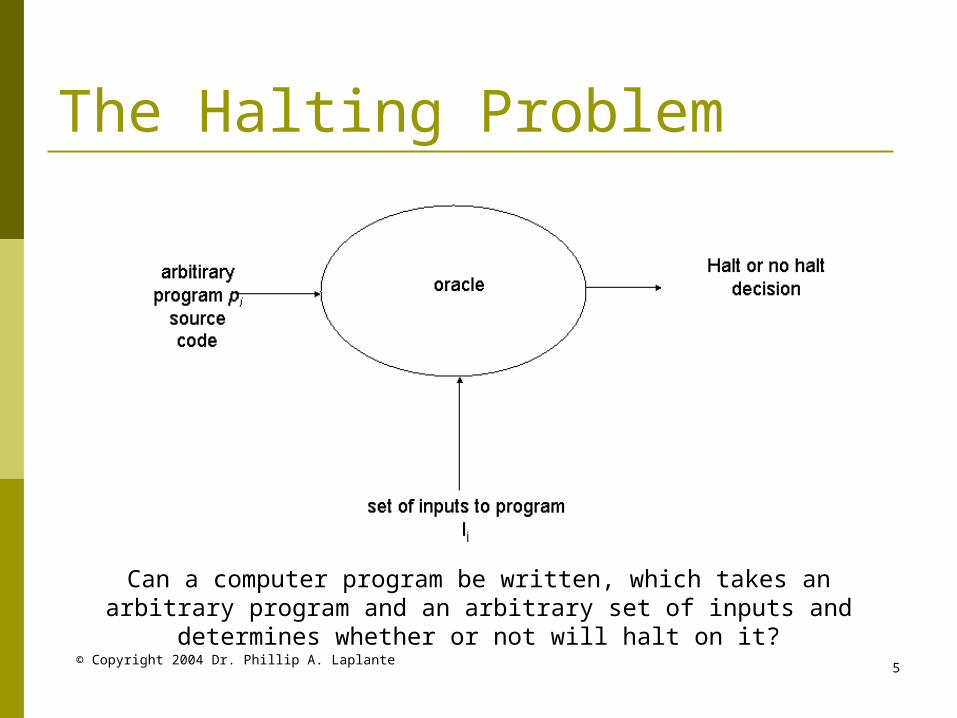
The Halting Problem
Can a computer program be written, which takes an arbitrary program and an arbitrary set of inputs and determines whether or
not will halt on it?
© Copyright 2004 Dr. Phillip A. Laplante6
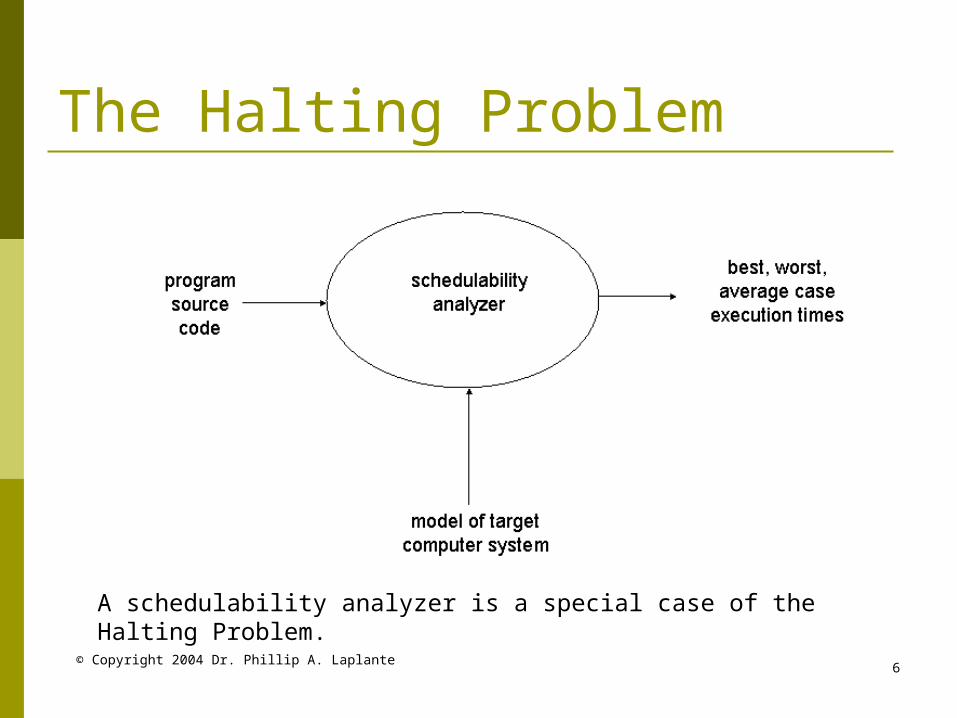
The Halting Problem
A schedulability analyzer is a special case of the Halting Problem.

© Copyright 2004 Dr. Phillip A. Laplante7
Amdahl’s Law Amdahl’s Law – a statement regarding the level
of parallelization that can be achieved by a parallel computer.
Amdahl’s Law – for a constant problem size, speedup approaches zero as the number of processor elements grows.
Amdahl’s Law is frequently cited as an argument against parallel systems and massively parallel processors.
speedup1 ( 1)
n
n s

© Copyright 2004 Dr. Phillip A. Laplante8
Gustafson’s Law Gustafson found that the underlying principle that “the
problem size scales with the number of processors” is inappropriate”.
Gustafson’s empirical results demonstrated that the parallel or vector part of a program scales with the problem size.
Times for vector start-up, program loading, serial bottlenecks, and I/O that make up the serial component of the run do not grow with the problem size.
speedup s p n
© Copyright 2004 Dr. Phillip A. Laplante9
Gustafson’s Law
0
2
4
6
8
10
12
14
16
18
1 4 7 10 13 16 19 22 25 28 31
Number of Processors
Sp
eed
up
Amdahl
Gustafson
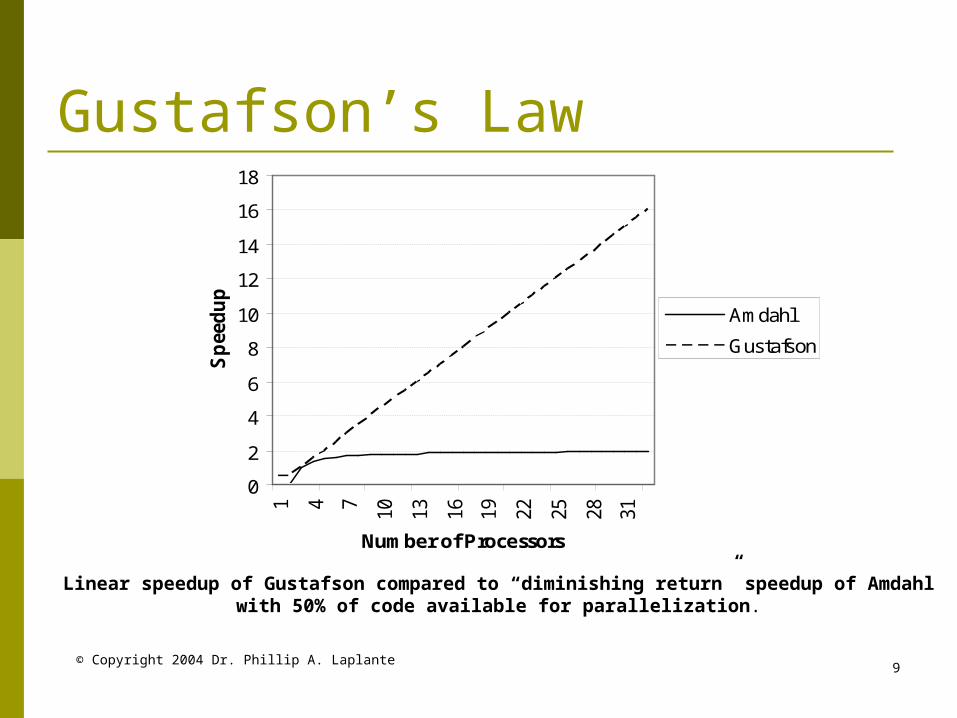
Linear speedup of Gustafson compared to “diminishing return” speedup of Amdahl with 50% of code available for parallelization.
© Copyright 2004 Dr. Phillip A. Laplante10
Performance estimation and optimization Theoretical preliminaries Performance analysis Application of queuing theory I/O performance Performance optimization Results from compiler optimization Analysis of memory requirements Reducing memory utilization

© Copyright 2004 Dr. Phillip A. Laplante11
Performance analysis Code execution time estimation Analysis of polled loops Analysis of coroutines Analysis of round-robin systems Response time analysis for fixed period systems Response time analysis -- RMA example Analysis of sporadic and aperiodic interrupt
systems Deterministic performance
© Copyright 2004 Dr. Phillip A. Laplante12
Code execution time estimation Instruction counting Instruction execution time simulators Use the system clock
© Copyright 2004 Dr. Phillip A. Laplante13
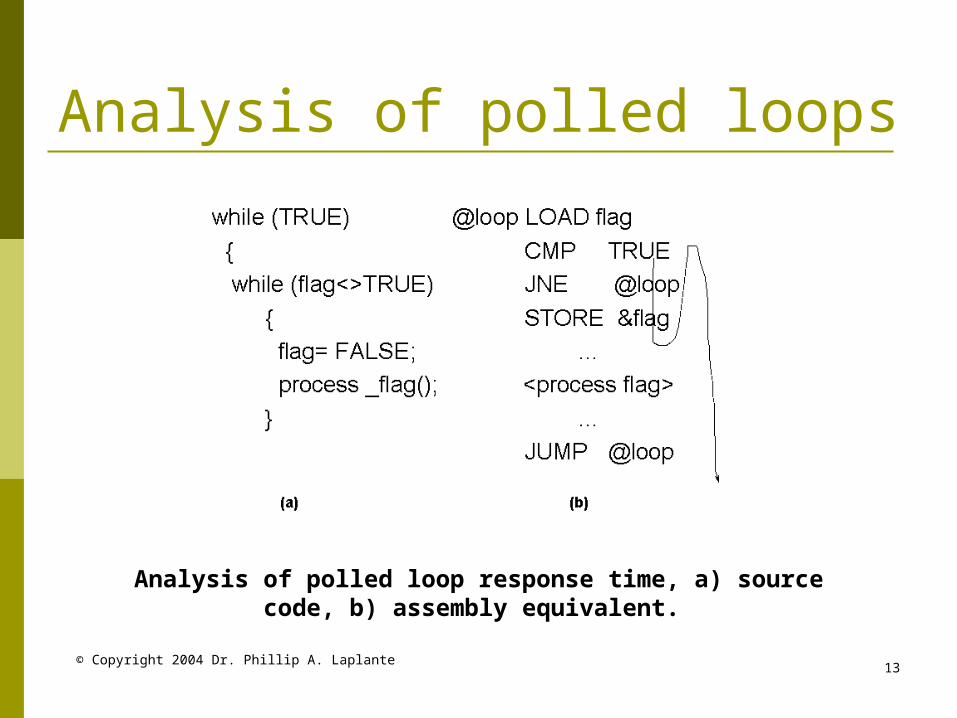
Analysis of polled loops
Analysis of polled loop response time, a) source code, b) assembly equivalent.

© Copyright 2004 Dr. Phillip A. Laplante14
Analysis of coroutines
Tracing the execution path in a two-task coroutine system. A switch statement in each task drives the phase driven code (not shown). A central dispatcher calls
task1() and task2() and provides intertask communication via global variables or parameter lists.

© Copyright 2004 Dr. Phillip A. Laplante15
Analysis of round-robin systems Assume n tasks, each with max execution time c and time
quantum q then T is worst case time from readiness to completion for any task (also known as turnaround time), denoted, is the waiting time plus undisturbed time to complete.
Example, suppose there are 5 processes with a maximum execution time of 500 ms. The time quantum is 100ms. Then total completion time is
( 1)c
T n q cq
500(5 1) 100 500 2500
100T ms
© Copyright 2004 Dr. Phillip A. Laplante16
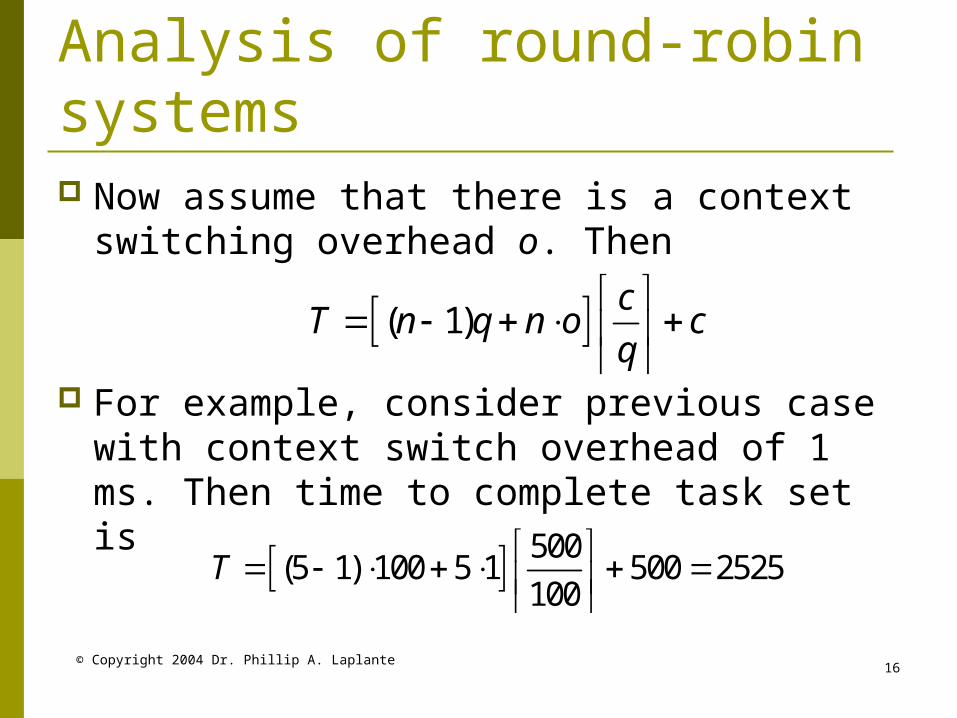
Analysis of round-robin systems Now assume that there is a context
switching overhead o. Then
For example, consider previous case with context switch overhead of 1 ms. Then time to complete task set is
( 1)c
T n q n o cq
500(5 1) 100 5 1 500 2525
100T

© Copyright 2004 Dr. Phillip A. Laplante17
Response time analysis for fixed period systems For a general task,response time,Ri,is given as Ri
= ei + Ii where ei is max execution time and Ii is the maximum amount of delay in execution, caused by higher priority tasks.
By solving as a recurrence relation, the response time of the nth iteration can be found as
Where hp(i) is the set tasks of a higher priority than task i.
1
( )
/n ni i i j j
j hp i
R e R p e

© Copyright 2004 Dr. Phillip A. Laplante18
Response time analysis for fixed period systems For our purposes, we will only deal with
specific cases of fixed-period systems. Such cases can be handled by manually
constructing a timeline of all tasks and then calculating individual response times directly from the timeline.

© Copyright 2004 Dr. Phillip A. Laplante19
Analysis of sporadic and aperiodic interrupt systems Use a rate-monotonic approach with the non-
periodic tasks having a period equal to their worst case expected inter-arrival time.
If this leads to unacceptably high utilizations use a heuristic analysis approach.
Queuing theory can also be helpful in this regard.
Calculating response times for interrupt systems depends on factors such as interrupt latency, scheduling/dispatching times, and context switch times.

© Copyright 2004 Dr. Phillip A. Laplante20
Deterministic performance Cache, pipelines, and DMA, all designed to improve average
real-time performance, destroy determinism and thus make prediction of real-time performance troublesome.
To do a worst case performance analysis, assume that every instruction is not fetched from cache but from memory.
In the case of pipelines, always assume that at every possible opportunity the pipeline needs to be flushed.
When DMA is present in the system, assume that cycle stealing is occurring at every opportunity, inflating instruction fetch times.
Does this mean that these make a system effectively unanalyzable for performance? Yes.
By making some reasonable assumptions about the real impact of these effects, some rational approximation of performance is possible.

© Copyright 2004 Dr. Phillip A. Laplante21
Performance estimation and optimization Theoretical preliminaries Performance analysis Application of queuing theory I/O performance Performance optimization Results from compiler optimization Analysis of memory requirements Reducing memory utilization
© Copyright 2004 Dr. Phillip A. Laplante22
Application of queuing theory The M/M/1 queue – basic model of a single
server (CPU) queue with exponentially distributed service and inter-arrival times can be used to model interrupt service times and response times.
Little’s law (1961) –Same as utilization calculation!
Erlang’s formula (1917) – can be used to a potential time-overloaded condition.

© Copyright 2004 Dr. Phillip A. Laplante23
Performance estimation and optimization Theoretical preliminaries Performance analysis Application of queuing theory I/O performance Performance optimization Results from compiler optimization Analysis of memory requirements Reducing memory utilization

© Copyright 2004 Dr. Phillip A. Laplante24
I/O performance Disk I/O is the single greatest contributor
to performance degradation. It is very difficult to account for disk device
access times when instruction counting. Best approach is to assume worse case
access times for device I/O and include them in performance predictions.

© Copyright 2004 Dr. Phillip A. Laplante25
Performance estimation and optimization Theoretical preliminaries Performance analysis Application of queuing theory I/O performance Performance optimization Results from compiler optimization Analysis of memory requirements Reducing memory utilization

© Copyright 2004 Dr. Phillip A. Laplante26
Performance optimization
Compute at slowest cycle Scaled numbers Imprecise computation Optimizing memory usage Post integration software optimization

© Copyright 2004 Dr. Phillip A. Laplante27
Compute at slowest cycle All processing should be done at the
slowest rate that can be tolerated. Often moving from fast cycle to slower one
will degrade performance but significantly improve utilization.
For example a compensation routine that takes 20ms in a 40ms cycle contributes 50% to utilization. Moving to 100ms cycle reduces that contribution to only 20%.
© Copyright 2004 Dr. Phillip A. Laplante28
Scaled numbers In virtually all computers, integer operations are
faster than floating-point ones. In scaled numbers, the least significant bit (LSB)
of an integer variable is assigned a real number scale factor.
Scaled numbers can be added and subtracted together and multiplied and divided by a constant (but not another scaled number).
The results are converted to floating-point at the last step – hence saving considerable time.

© Copyright 2004 Dr. Phillip A. Laplante29
Scaled numbers For example, suppose an analog-to-digital
converter is converting accelerometer data. Let the least significant bit of the two’s
complement 16-bit integer have value 0.0000153 ft/sec2.
Then any acceleration can be represented up to the maximum value of
The 16-bit number 0000 0000 0001 011, for example, represents an acceleration of 0.0001683 ft/sec2.
152 1 *0.0000153 0.5013351

© Copyright 2004 Dr. Phillip A. Laplante30
Imprecise computation Sometimes partial results are acceptable in order
to meet a deadline. In the absence of firmware support or DSP
coprocessors, complex algorithms are often employed to produce the desired calculation.
E.g., a Taylor series expansion (perhaps using look-up tables).
Imprecise computation (approximate reasoning) is often difficult to apply because it is hard to determine the processing that can be discarded, and its cost.
© Copyright 2004 Dr. Phillip A. Laplante31
Optimizing memory usage In modern computers memory constraints are not
as troublesome as they once were – except in small, embedded, wireless, and ubiquitous computing!
Since there is a fundamental trade-off between memory usage and CPU utilization (with rare exceptions), to optimize for memory usage, trade run-time performance to save memory.
E.g., in look up tables, more entries reduces average execution time and increases accuracy. Less entries saves memory but has reverse effect.
Bottom line: match the real-time processing algorithms to the underlying architecture.
© Copyright 2004 Dr. Phillip A. Laplante32
Post integration software optimization After system implementation, techniques can be
used to squeeze additional performance from the machine.
Includes the use of assembly language patches and hand-tuning compiler output.
Can lead to unmaintainable and unreliable code because of poor documentation.
Better to use coding “tricks” that involve direct interaction with the high-level language and that can be documented.
These tricks improve real-time performance, but generally not at the expense of maintainability and reliability.

© Copyright 2004 Dr. Phillip A. Laplante33
Performance estimation and optimization Theoretical preliminaries Performance analysis Application of queuing theory I/O performance Performance optimization Results from compiler optimization Analysis of memory requirements Reducing memory utilization

© Copyright 2004 Dr. Phillip A. Laplante34
Results from compiler optimization
use of arithmetic identities reduction in strength common sub-expression
elimination use of intrinsic functions constant folding loop invariant removal loop induction elimination use of revisers and caches dead code removal
flow-of-control optimization constant propagation dead-store elimination dead-variable elimination, short-circuit Boolean code loop unrolling loop jamming cross jump elimination speculative execution
Code optimization techniques used by compilers can be forced manually to improve real-time performance where the compiler does not implement them. These include:
© Copyright 2004 Dr. Phillip A. Laplante35
Results from compiler optimization
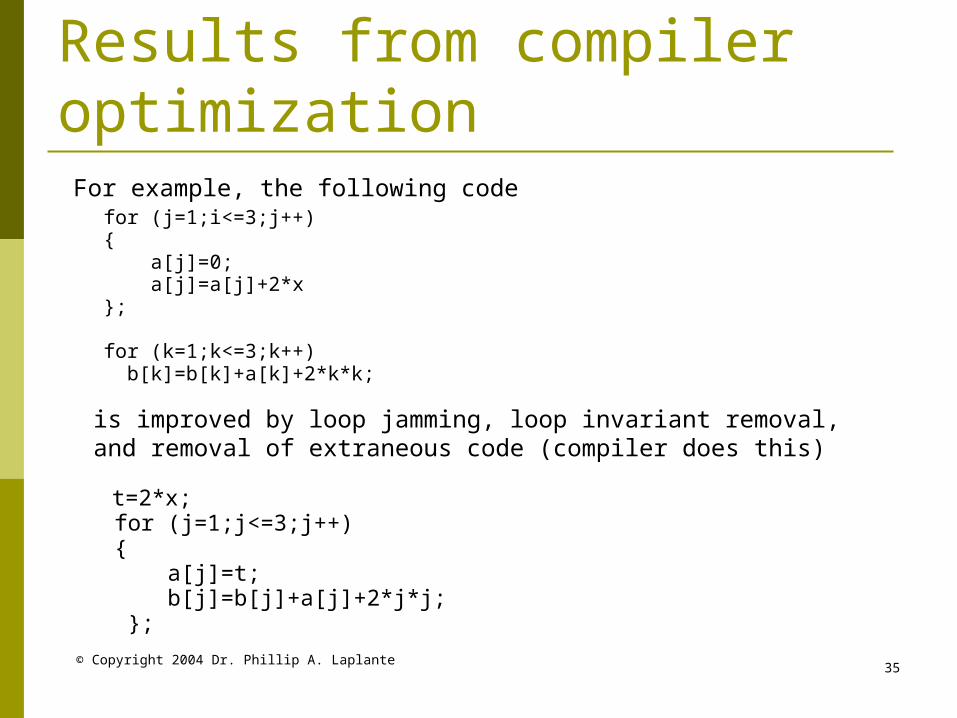
for (j=1;i<=3;j++) { a[j]=0; a[j]=a[j]+2*x }; for (k=1;k<=3;k++) b[k]=b[k]+a[k]+2*k*k;
is improved by loop jamming, loop invariant removal, and removal of extraneous code (compiler does this)
t=2*x; for (j=1;j<=3;j++) { a[j]=t; b[j]=b[j]+a[j]+2*j*j; };
For example, the following code

© Copyright 2004 Dr. Phillip A. Laplante36
Results from compiler optimizationNext, loop unrolling yields (you have to do this, not the compiler):
Finally, after constant folding, the improved code is:
t=2*x; a[1]=t ; b[1]=b[1]+a[1]+2*1*1; a[2]=t ; b[2]=b[2]+a[2]+2*2*2; a[3]=t ; b[3]=b[3]+a[3]+2*3*3;
t=2*x; a[1]=t; b[1]=b[1]+a[1]+2; a[2]=t; b[2]=b[2]+a[2]+8; a[3]=t; b[3]=b[3]+a[3]+18;

© Copyright 2004 Dr. Phillip A. Laplante37
Results from compiler optimization The original code involved 9 additions and
9 multiplications, numerous data movement instructions, and loop overheads. The improved code requires only 6 additions, 1 multiply, less data movement, and no loop overhead. It is very unlikely that any compiler would have been able to make such an optimization.

© Copyright 2004 Dr. Phillip A. Laplante38
Performance estimation and optimization Theoretical preliminaries Performance analysis Application of queuing theory I/O performance Performance optimization Results from compiler optimization Analysis of memory requirements Reducing memory utilization

© Copyright 2004 Dr. Phillip A. Laplante39
Analysis of memory requirements With memory becoming denser and cheaper,
memory utilization analysis has become less of a concern.
Still, its efficient use is important in small embedded systems and air and space applications where savings in size, power consumption, and cost are desirable.
Most critical issue is deterministic prediction of RAM space needed (too little can result in catastrophe).
Same goes for other rewritable memory (e.g. flash memory in Mars Rover).

© Copyright 2004 Dr. Phillip A. Laplante40
Reducing memory utilization Shift utilization from one part of memory to
another (e.g. precompute constants and store in ROM).
Reuse variables where possible (document carefully).
Optimizing compilers that manage memory better (e.g. advanced Java memory managers).
Self modifying instructions? Good garbage reclamation and memory
compaction.


















