© 2015 Carnegie Mellon University Interpolating Property Directed Reachability Software Engineering...
48
© 2015 Carnegie Mellon University Interpolating Property Directed Reachability Software Engineering Institute Carnegie Mellon University Pittsburgh, PA 15213 Arie Gurfinkel and Yakir Vizel July 18, 2015
-
Upload
juliet-nelson -
Category
Documents
-
view
218 -
download
2
Transcript of © 2015 Carnegie Mellon University Interpolating Property Directed Reachability Software Engineering...
© 2015 Carnegie Mellon University
Interpolating Property Directed Reachability
Software Engineering InstituteCarnegie Mellon UniversityPittsburgh, PA 15213
Arie Gurfinkel and Yakir VizelJuly 18, 2015
3
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
http://arieg.bitbucket.org/avy/
4
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
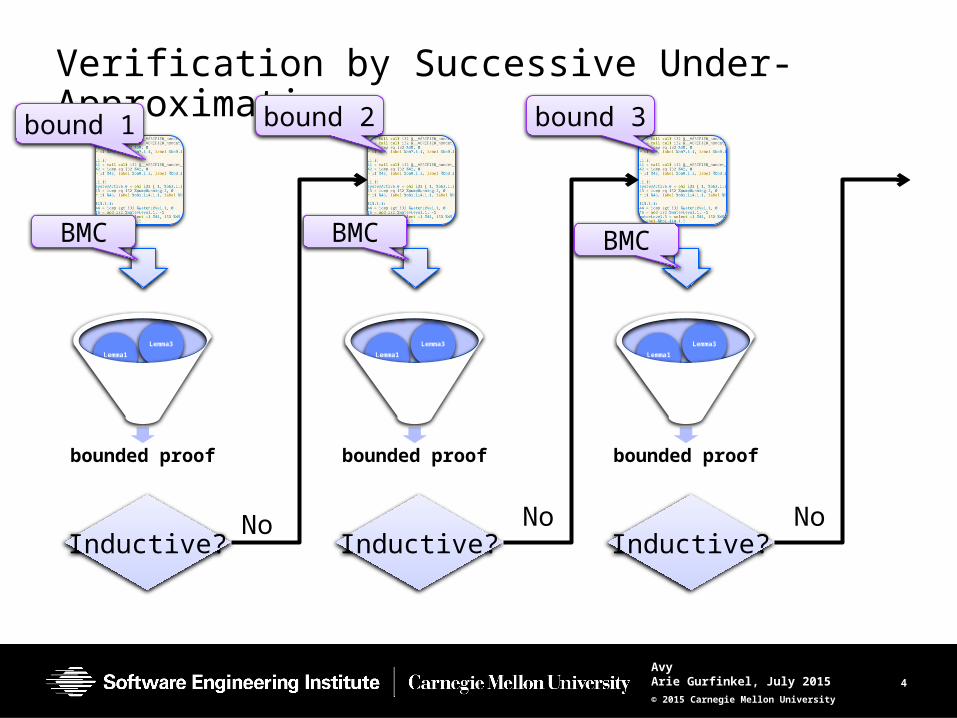
Verification by Successive Under-Approximation
bounded proof
Lemma2
Lemma1
Lemma3
Inductive?
bounded proof
Lemma2
Lemma1
Lemma3
Inductive?
bounded proof
Lemma2
Lemma1
Lemma3
Inductive?No No No
BMC BMC BMC
bound 1 bound 2 bound 3
5
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
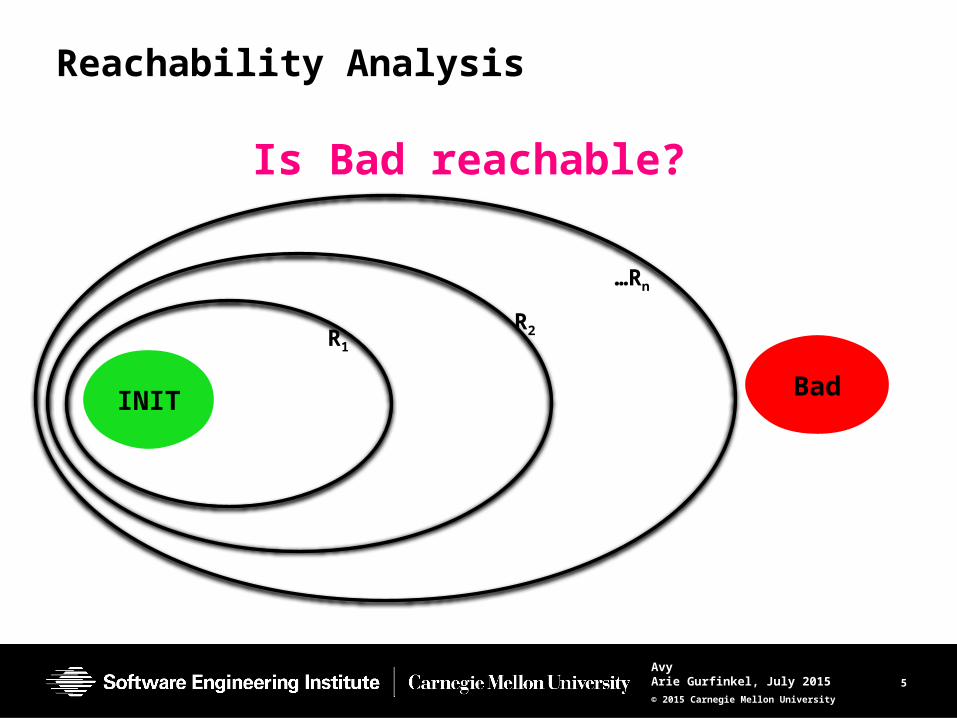
INIT
Reachability Analysis
5
Bad
Is Bad reachable?
R1
R2
…Rn
6
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
Outline
Interpolating Model Checking
IC3 / Property Directed Reachabilty
Avy: Interpolating Property Directed Reachability
DRUP Interpolants
Fast Interpolating BMC
Future Directions
7
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
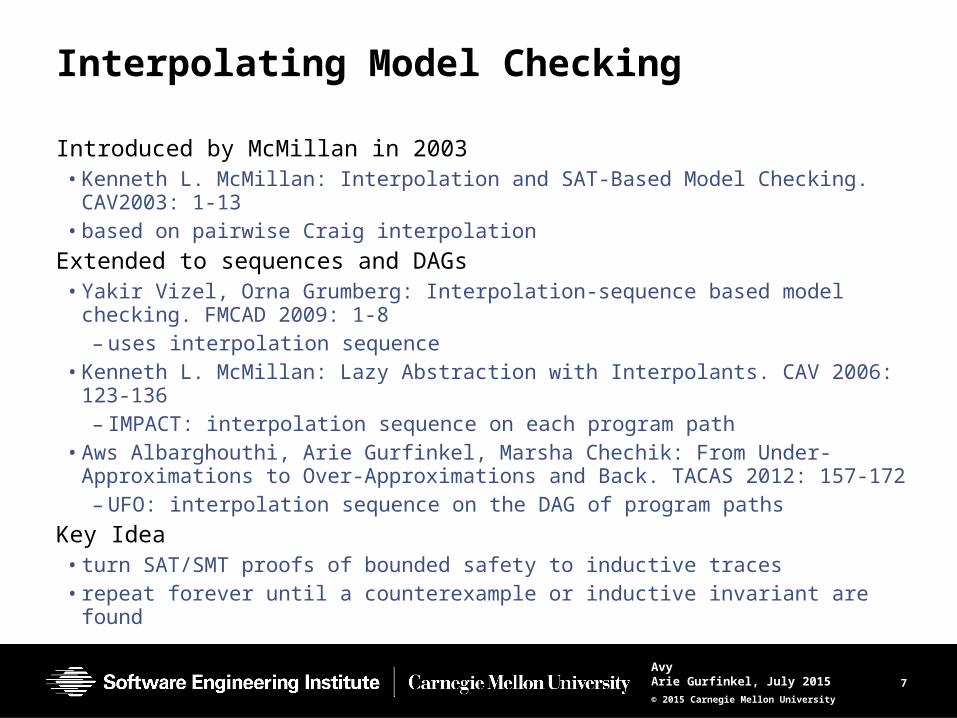
Interpolating Model Checking
Introduced by McMillan in 2003•Kenneth L. McMillan: Interpolation and SAT-Based Model Checking.
CAV2003: 1-13•based on pairwise Craig interpolation
Extended to sequences and DAGs•Yakir Vizel, Orna Grumberg: Interpolation-sequence based model checking.
FMCAD 2009: 1-8– uses interpolation sequence
•Kenneth L. McMillan: Lazy Abstraction with Interpolants. CAV 2006: 123-136– IMPACT: interpolation sequence on each program path
•Aws Albarghouthi, Arie Gurfinkel, Marsha Chechik: From Under-Approximations to Over-Approximations and Back. TACAS 2012: 157-172–UFO: interpolation sequence on the DAG of program paths
Key Idea• turn SAT/SMT proofs of bounded safety to inductive traces• repeat forever until a counterexample or inductive invariant are found
8
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
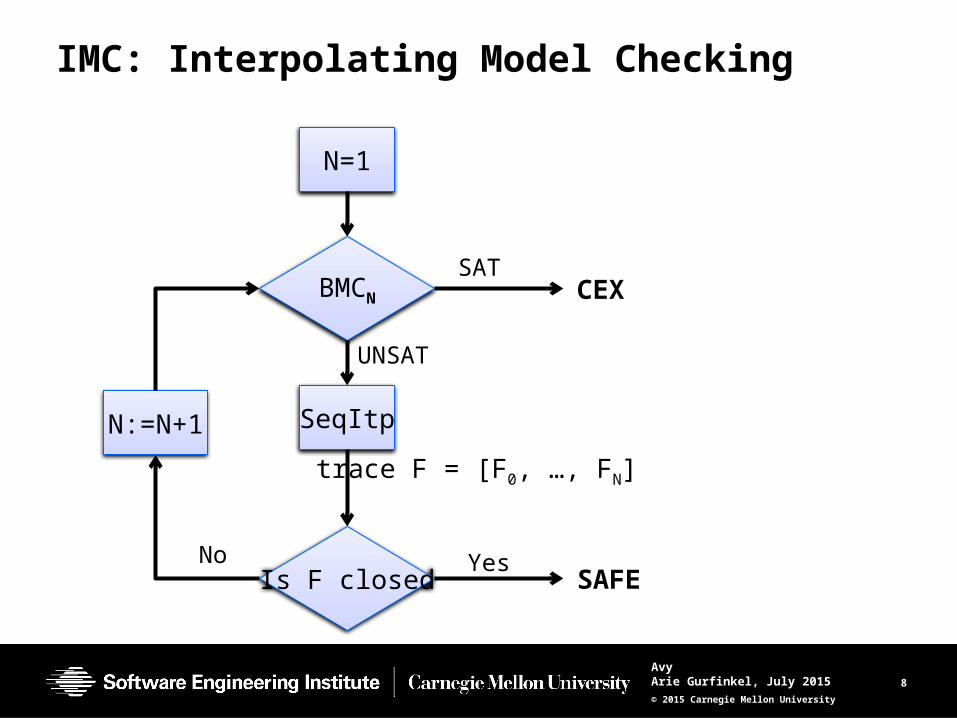
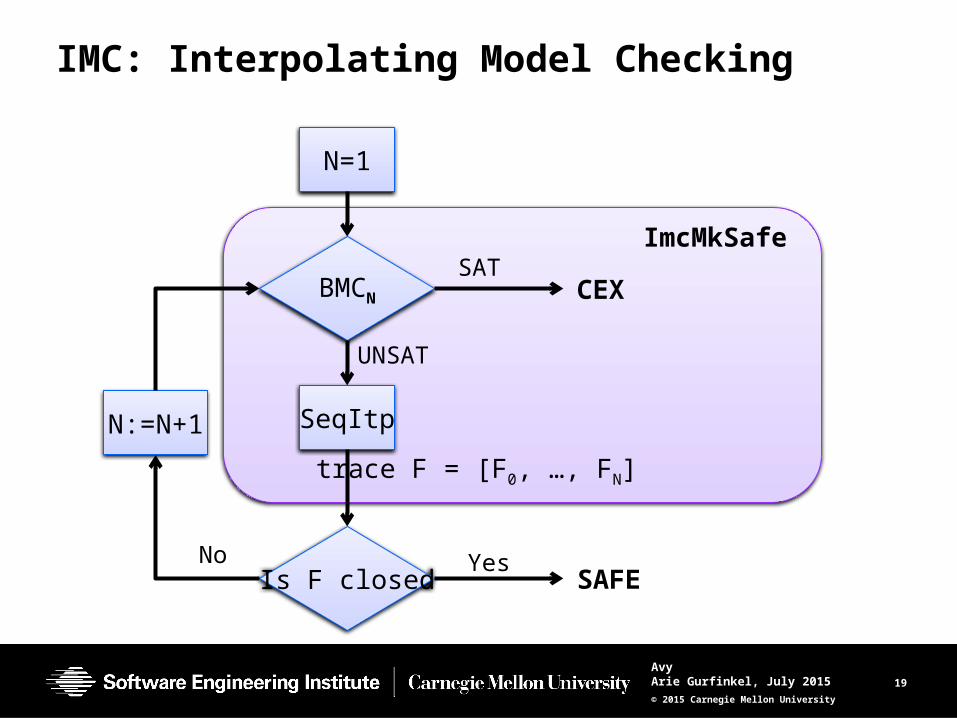
IMC: Interpolating Model Checking
N=1
BMCN
SeqItp
trace F = [F0, …, FN]
Is F closed
N:=N+1
CEX
SAFE
SAT
UNSAT
YesNo
9
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
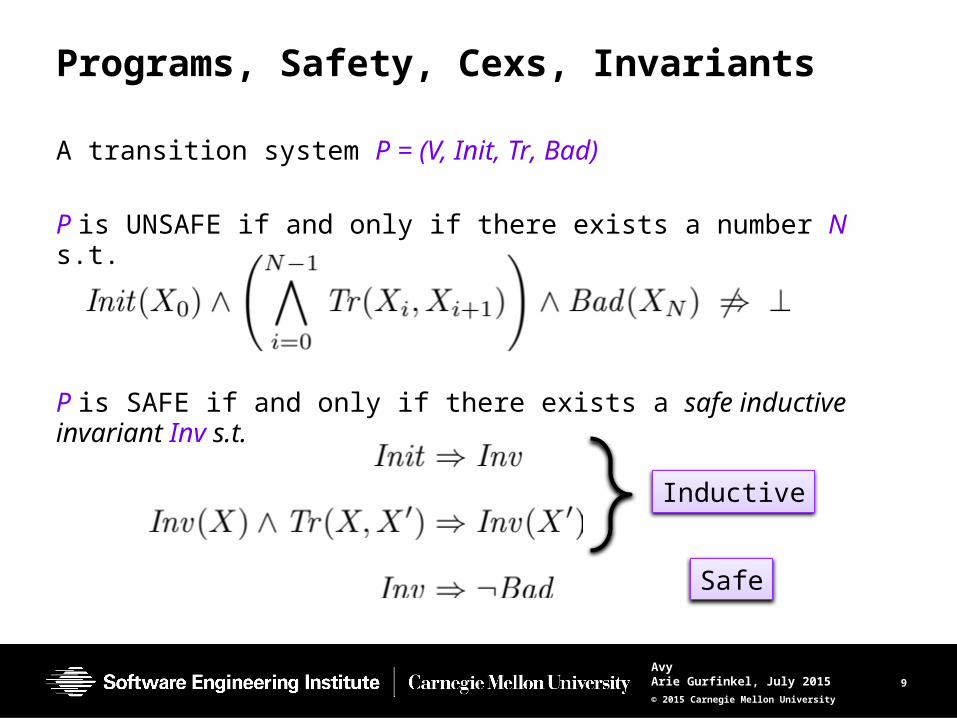
Programs, Safety, Cexs, Invariants
A transition system P = (V, Init, Tr, Bad)
P is UNSAFE if and only if there exists a number N s.t.
P is SAFE if and only if there exists a safe inductive invariant Inv s.t.
Inductive
Safe
10
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
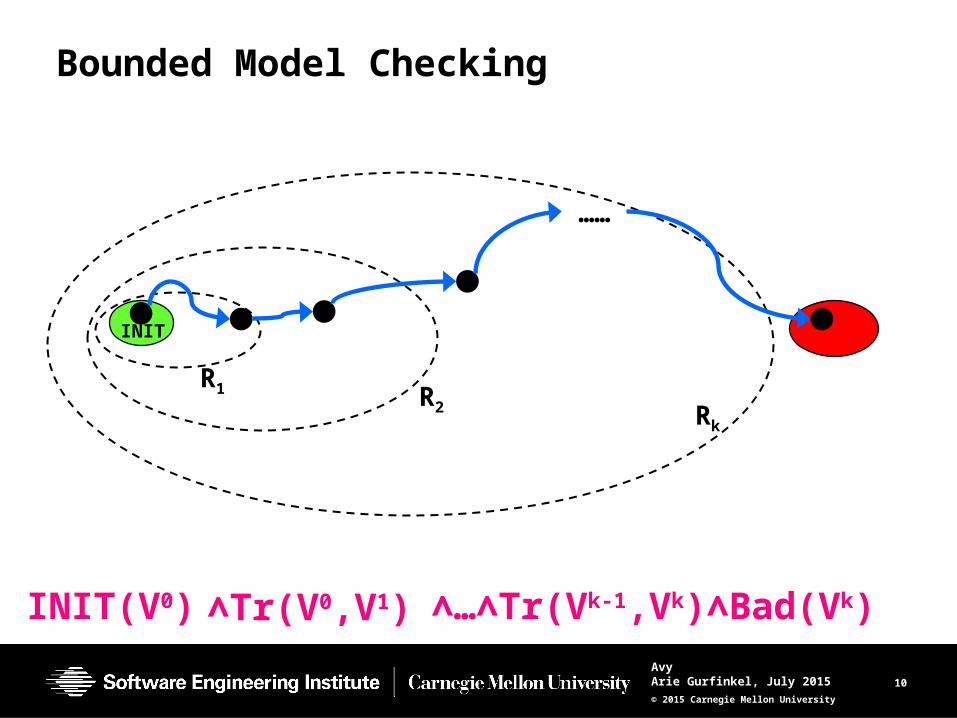
Bounded Model Checking
INIT
R1 R2
……
INIT(V0)
Rk
∧Tr(V0,V1)∧…∧Tr(Vk-1,Vk)∧Bad(Vk)
11
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
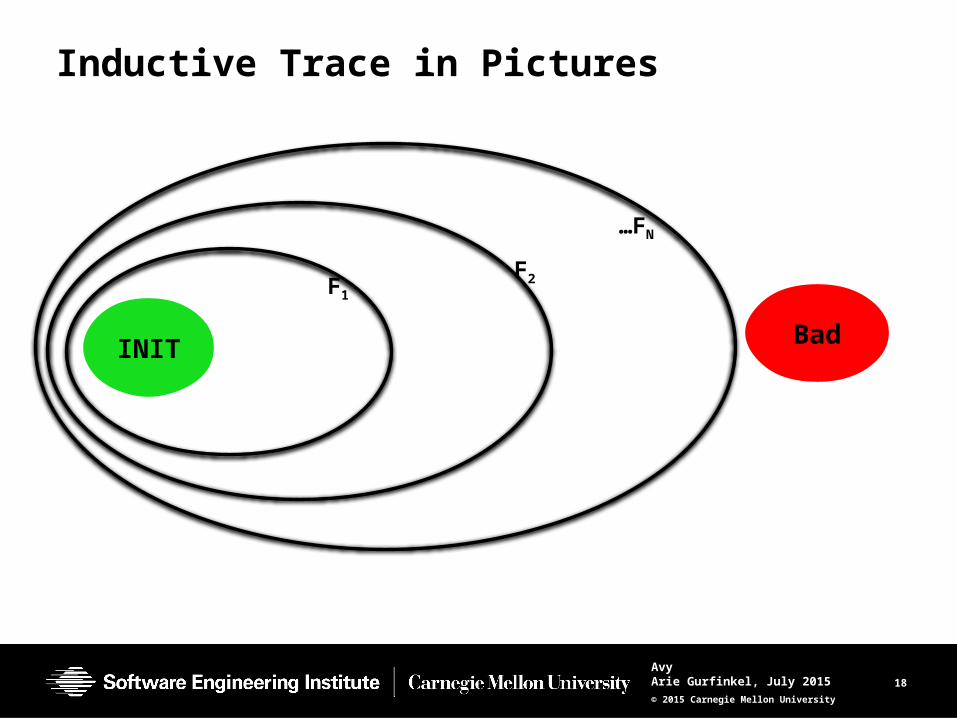
Inductive Trace
An inductive trace of a transition system P = (V, Init, Tr, Bad) is a sequence of formulas [F0, …, FN] such that
• Init F0
• 8 0 · i < N , Fi(v) Æ Tr (v, u) Fi+1 (u)
A trace is safe iff 8 0 · i · N , Fi :Bad
A trace is monotone iff 8 0 · i < N , Fi Fi+1
A trace is closed iff 9 1 · i · N, Fi (F0 Ç … Ç Fi-1)
A transition system P is SAFE iff it admits a safe closed trace
12
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
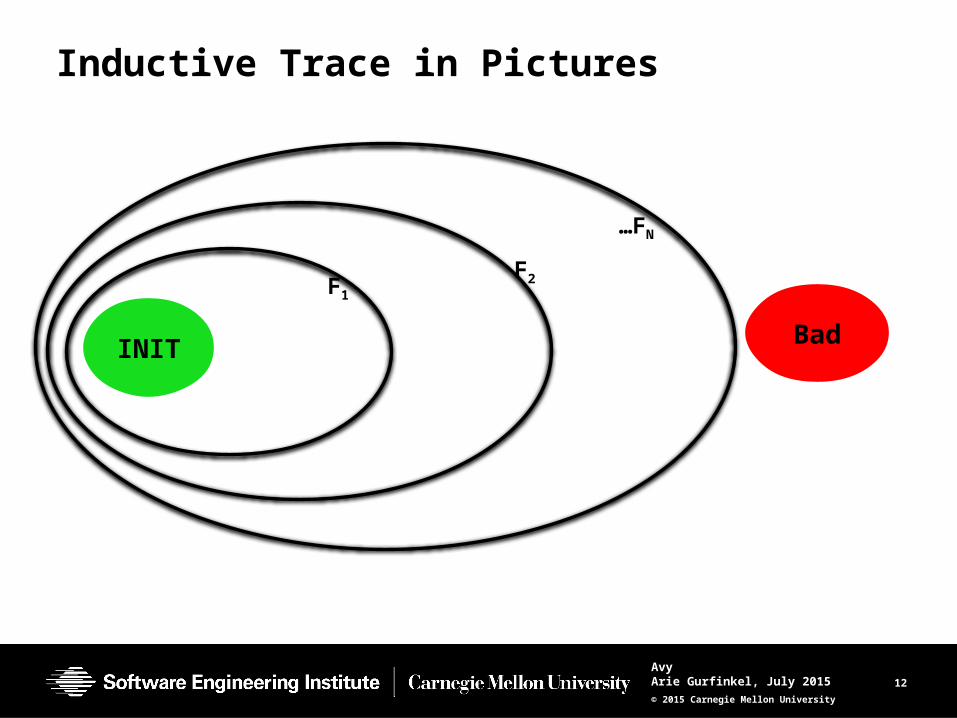
INIT
Inductive Trace in Pictures
12
Bad
F1
F2
…FN
13
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
Craig Interpolation Theorem
Theorem (Craig 1957)Let A and B be two First Order (FO) formulae such that A ) :B, then there exists a FO formula I, denoted ITP(A, B), such that
A ) I I ) :B atoms(I) 2 atoms(A) Å atoms(B)
A Craig interpolant ITP(A, B) can be effectively constructed from a resolution proof of unsatisfiability of A Æ B
In Model Cheching, Craig Interpolation Theorem is used to safely over-approximate the set of (finitely) reachable states
14
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
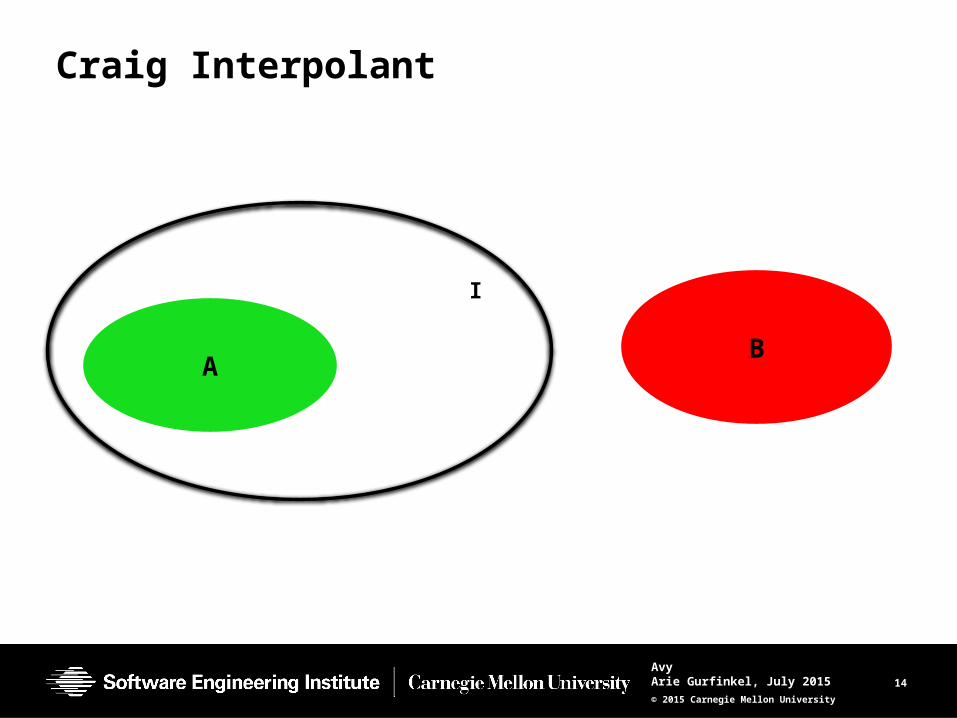
A
Craig Interpolant
14
B
I
15
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
Craig Interpolant as a Circuit
Let F = A(x, z) Æ B(z, y) be UNSAT, where x and y are distinct•Note that for any assignment v to z either
–A(x, v) is UNSAT, or–B(v, y) is UNSAT
An interpolant is a circuit I(z) such that for every assignment v to z• I(v) = A only if A(x, v) is UNSAT• I(v) = B only if B(v, y) is UNSAT
A proof system S has a feasible interpolation if for every refutation ¼ of F in S, F has an interpolant polynomial in the size of ¼•propositional resolution has feasible interpolation•extended resolution does not have feasible interpolation
16
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
) ) ) )))
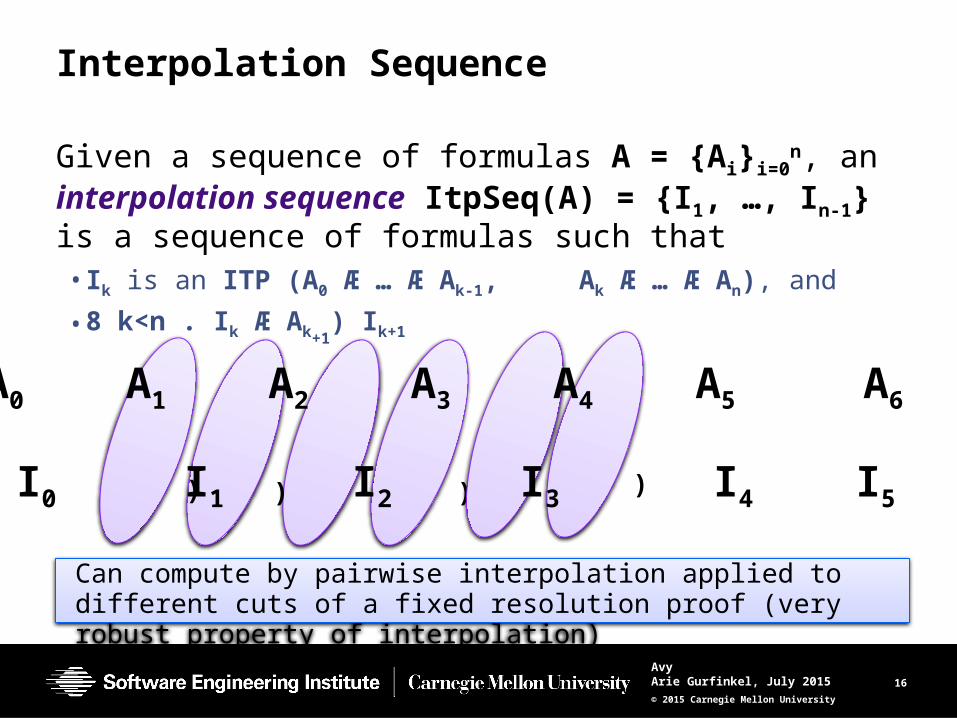
Interpolation Sequence
Given a sequence of formulas A = {Ai}i=0n, an interpolation
sequence ItpSeq(A) = {I1, …, In-1} is a sequence of formulas such that•Ik is an ITP (A0 Æ … Æ Ak-1, Ak Æ … Æ An), and
•8 k<n . Ik Æ Ak+1) Ik+1
A0 A1 A2 A3 A4 A5 A6
I0 I1 I2 I3 I4 I5
Can compute by pairwise interpolation applied to different cuts of a fixed resolution proof (very robust property of interpolation)
17
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
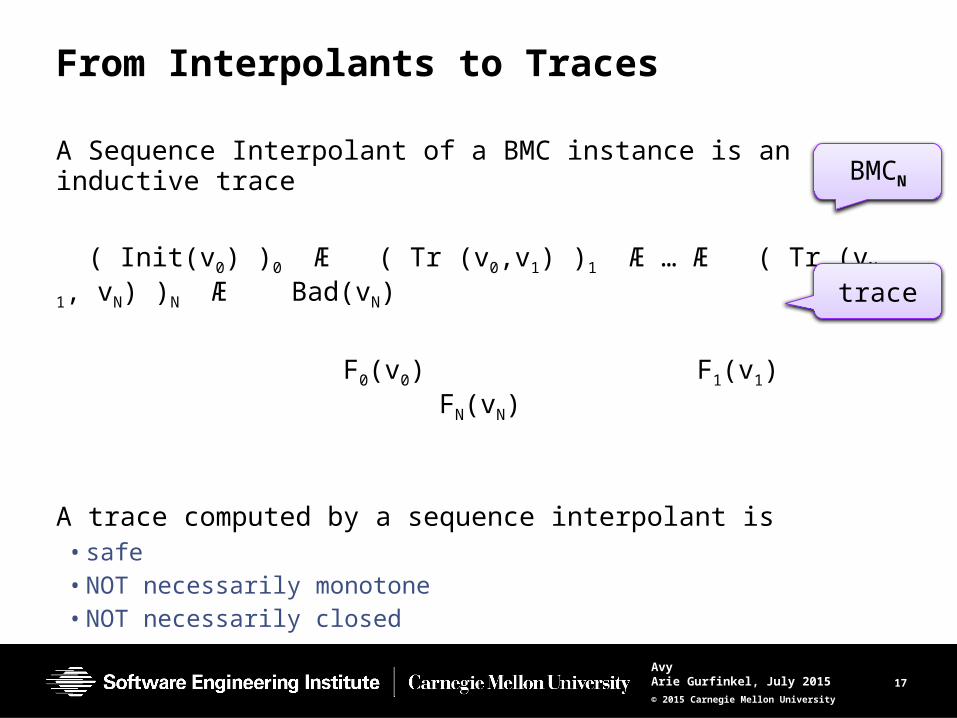
From Interpolants to Traces
A Sequence Interpolant of a BMC instance is an inductive trace
( Init(v0) )0 Æ ( Tr (v0,v1) )1 Æ … Æ ( Tr (vN-1, vN) )N Æ Bad(vN)
F0(v0) F1(v1) FN(vN)
A trace computed by a sequence interpolant is •safe•NOT necessarily monotone•NOT necessarily closed
BMCN
trace
18
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
INIT
Inductive Trace in Pictures
18
Bad
F1
F2
…FN
19
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
ImcMkSafe
IMC: Interpolating Model Checking
N=1
BMCN
SeqItp
trace F = [F0, …, FN]
Is F closed
N:=N+1
CEX
SAFE
SAT
UNSAT
YesNo
20
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
IMC: Strength and Weaknesses
Strength•elegant•global bounded safety proof•many different interpolation algorithms available•easy to extend to SMT theories
Weaknesses• the naïve version does not converge easily
– interpolants are weaker towards the end of the sequence•not incremental
– no information is reused between BMC queries•size of interpolants•hard to guide
21
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
IC3: Property Directed Reachability
IC3: A SAT-based Hardware Model Checker• Incremental Construction of Inductive Clauses for Indubitable Correctness•A. Bradley: SAT-Based Model Checking without Unrolling. VMCAI 2011
PDR: Explained and extended the implementation•Property Directed Reachability•N. Eén, A. Mishchenko, R. K. Brayton: Efficient implementation of property
directed reachability. FMCAD 2011
Very active area of research
Key Idea:•carefully manage SAT solving while building an inductive proof one inductive
lemma at a time
22
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
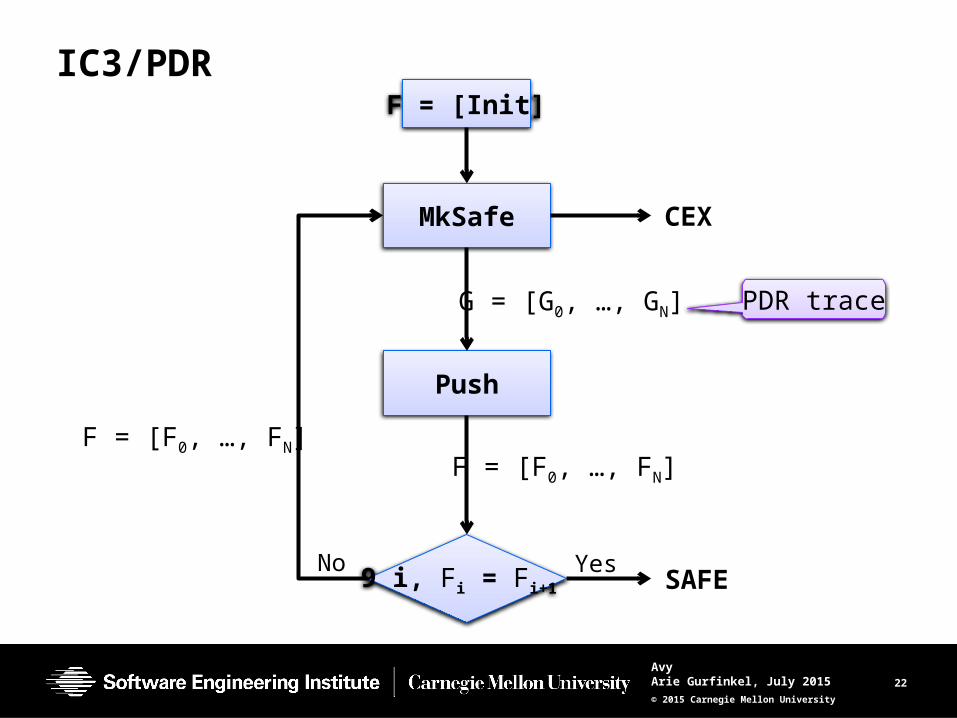
IC3/PDRF = [Init]
MkSafe
Push
9 i, Fi = Fi+1
G = [G0, …, GN]
F = [F0, …, FN]F = [F0, …, FN]
PDR trace
CEX
SAFEYesNo
23
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
PDR Trace
Recall that an inductive trace of a transition system P = (V, Init, Tr, Bad) is a sequence of formulas [F0, …, FN] such that
• Init F0
• 8 0 · i < N , Fi(v) Æ Tr (v, u) Fi+1 (u)
A trace is clausal if every Fi is in CNF
A delta-compressed trace (or ±-trace) is a sequence of clauses s.t.•each clause c belongs to a unique frame Fi
• 8 0 · i · n , 8 j < i , 8 c 2 Fi . c Fj
A PDR trace is a monotone, clausal, safe (up to N-1)•PDR trace is often represented compactly by a ±-trace
24
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
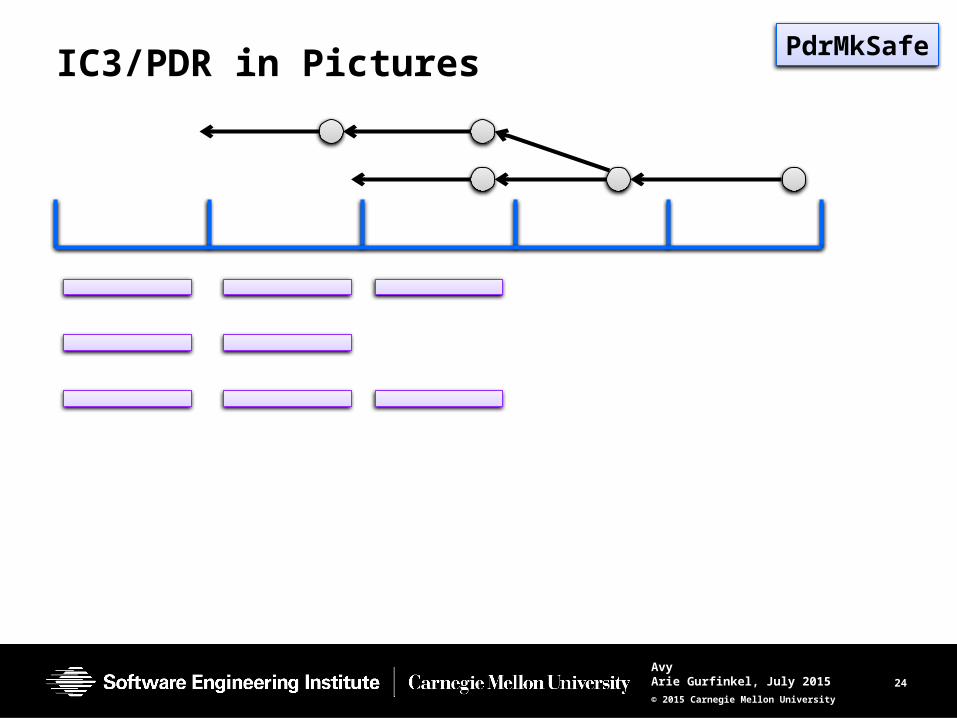
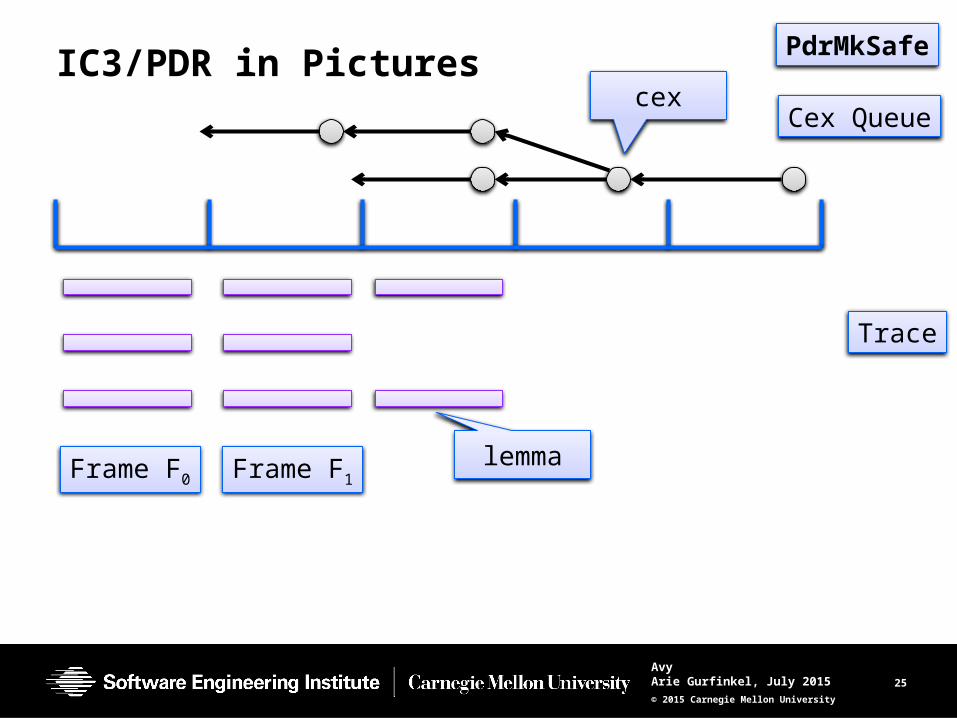
IC3/PDR in PicturesPdrMkSafe
25
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
IC3/PDR in PicturesCex Queue
Trace
Frame F0 Frame F1lemma
cex
PdrMkSafe
26
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
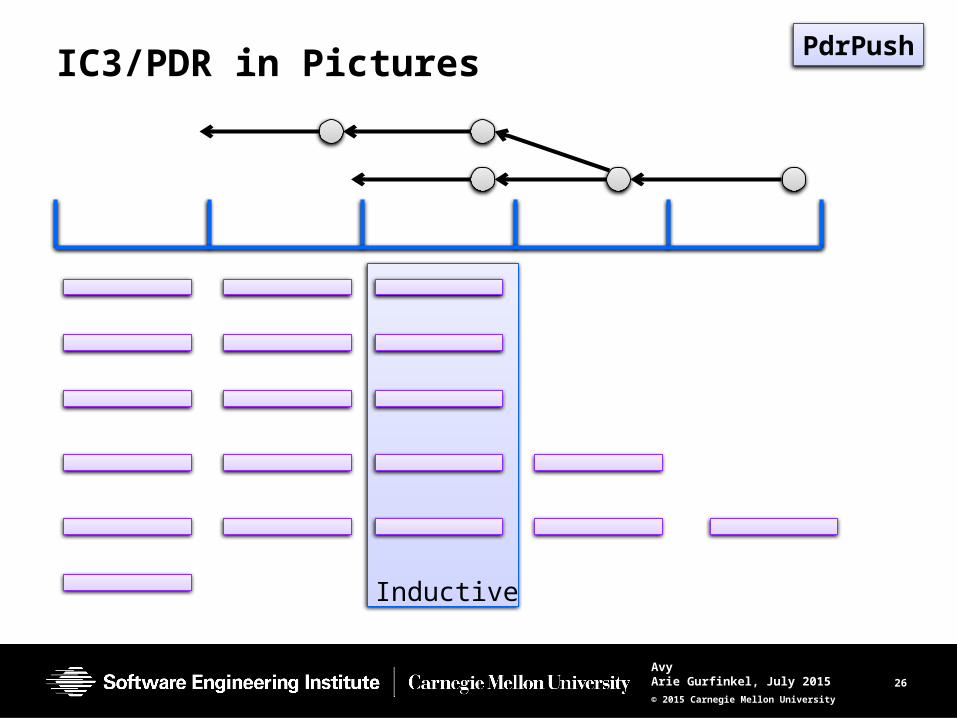
Inductive
IC3/PDR in PicturesPdrPush
27
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
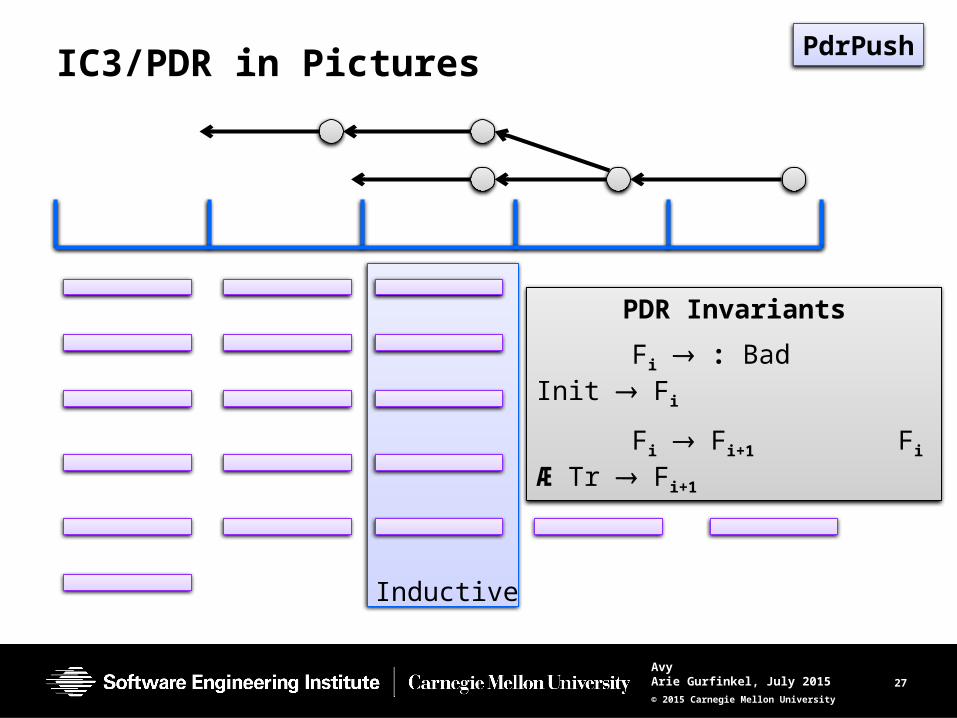
Inductive
IC3/PDR in PicturesPdrPush
PDR Invariants
Fi : Bad Init Fi
Fi Fi+1 Fi Æ Tr Fi+1
28
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
PDR Strength and Weaknesses
Strengths•elegant• incremental•many opportunities for guidance
– fine-grained proof management– fine-grained generalization of lemmas
Weaknesses• local backward search for a counterexample•CNF explosion
29
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
AVY: Interpolating PDR
This talk•Yakir Vizel, Arie Gurfinkel: Interpolating Property Directed Reachability. CAV
2014: 260-276
Key Idea•combine global BMC reasoning of IMC with local strengthening of IC3/PDR•use interpolation for PDR•use PDR for interpolation
30
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
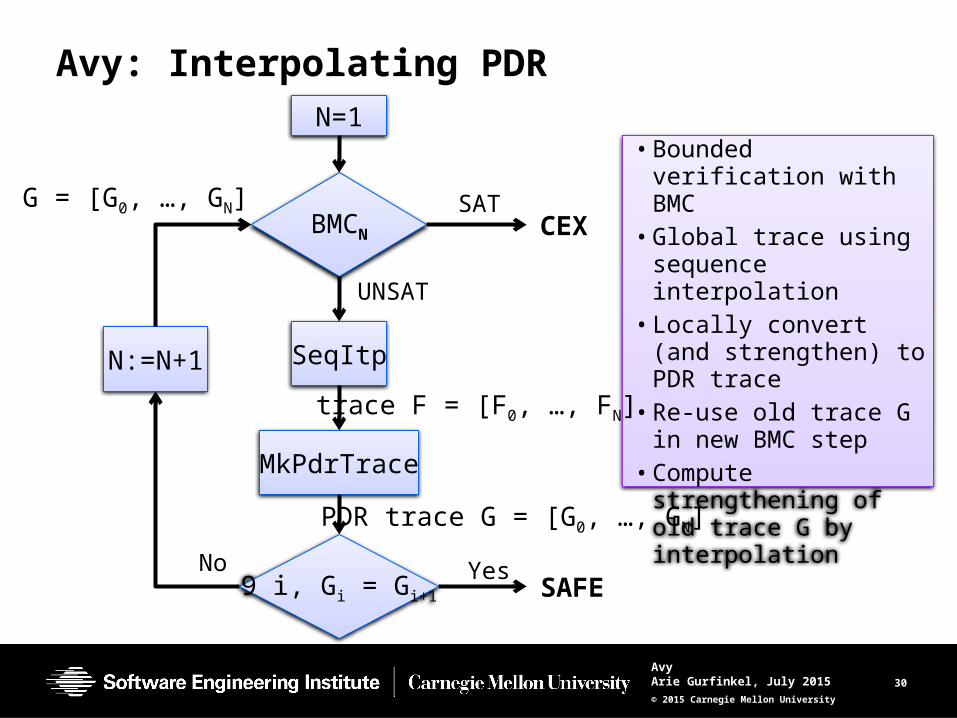
Avy: Interpolating PDR
•Bounded verification with BMC
•Global trace using sequence interpolation
•Locally convert (and strengthen) to PDR trace
•Re-use old trace G in new BMC step
•Compute strengthening of old trace G by interpolation
N=1
BMCN
SeqItp
trace F = [F0, …, FN]
9 i, Gi = Gi+1
N:=N+1
CEX
SAFE
SAT
UNSAT
YesNo
MkPdrTrace
PDR trace G = [G0, …, GN]
G = [G0, …, GN]

31
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
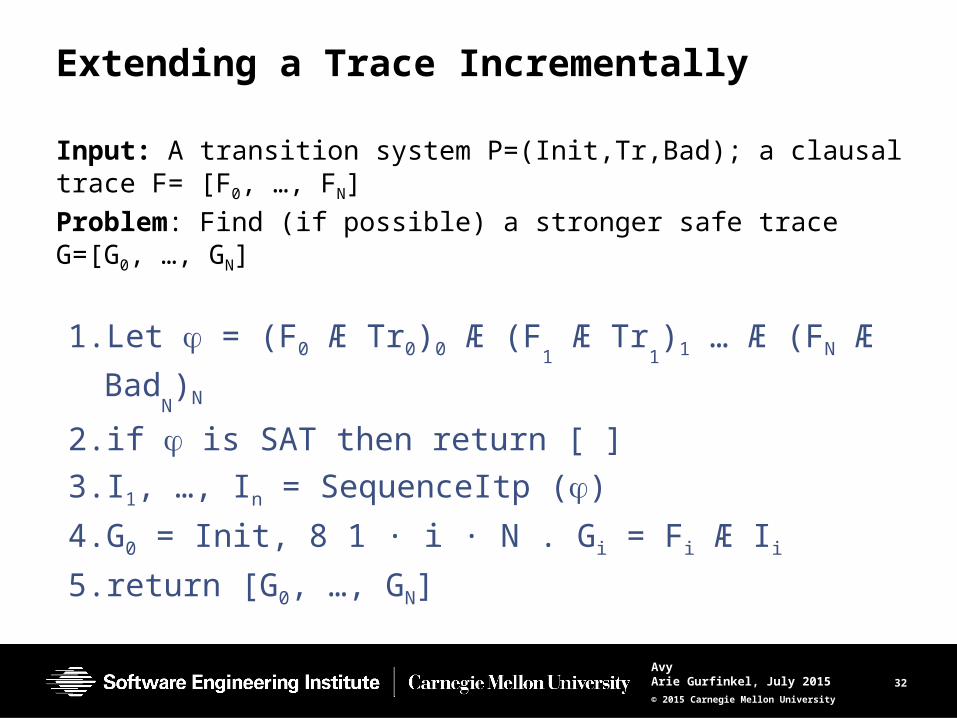
Extending a Trace Incrementally
Input: A transition system P=(Init,Tr,Bad); a clausal trace F= [F0, …, FN]
Problem: Find (if possible) a stronger safe trace G=[G0, …, GN]
Init(v0) Æ Tr (v0,v1) Æ … Æ Tr (vN-1, vN) Æ Bad(vN)
F0 F1 FNFN-1
G0 G1 GNGN-1
32
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
Extending a Trace Incrementally
Input: A transition system P=(Init,Tr,Bad); a clausal trace F= [F0, …, FN]
Problem: Find (if possible) a stronger safe trace G=[G0, …, GN]
1. Let = (F0 Æ Tr0)0 Æ (F1 Æ Tr
1)1 … Æ (FN Æ Bad
N)N
2. if is SAT then return [ ]
3. I1, …, In = SequenceItp ()4. G0 = Init, 8 1 · i · N . Gi = Fi Æ Ii
5. return [G0, …, GN]
33
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
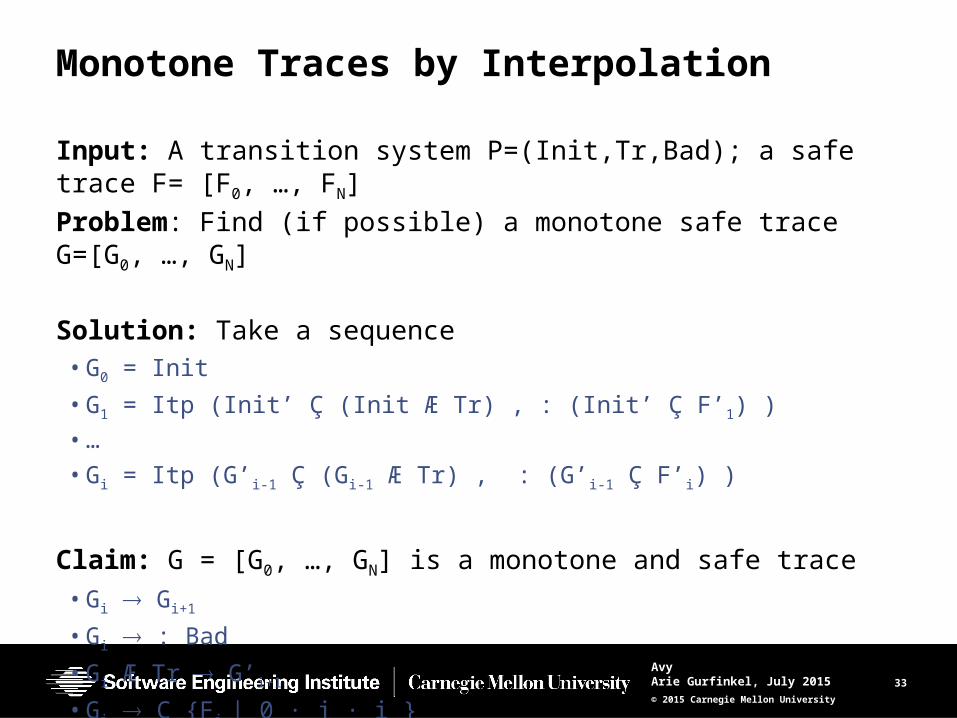
Monotone Traces by Interpolation
Input: A transition system P=(Init,Tr,Bad); a safe trace F= [F0, …, FN]
Problem: Find (if possible) a monotone safe trace G=[G0, …, GN]
Solution: Take a sequence •G0 = Init
•G1 = Itp (Init’ Ç (Init Æ Tr) , : (Init’ Ç F’1) )
•…
•Gi = Itp (G’i-1 Ç (Gi-1 Æ Tr) , : (G’i-1 Ç F’i) )
Claim: G = [G0, …, GN] is a monotone and safe trace
•Gi Gi+1
•Gi : Bad
•Gi Æ Tr G’i+1
•Gi Ç {Fj | 0 · j · i }
34
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
The Tricky Part of the Proof
Given a sequence •G0 = Init
•G1 = Itp (G’0 Ç (G0 Æ Tr) , : (G’0 Ç F’1)
•G2 = Itp (G’1 Ç (G1 Æ Tr), : (G’1 Ç F’2)
•…
Need to show that G1 Æ Tr (G’1 Ç F’2)
•by property of interpolation G1 (G0 Ç F1)
•because F is a trace, F1 Æ Tr F’2•by property of interpolation G0 Æ Tr G’1
BUT the trace G=[G0, …, GN] is not monotone•and likely to be large
35
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
Using PDR for Interpolation
Given mutually unsatisfiable pair of formulas A and B
Construct a SAFE transition system P = (A, ID, B) with• initial state A• transition relation ID over common variables of A and B
– ID = Æ { x=x’ | x 2 Vars (A) Å Vars (B) }•bad states B
Run PDR/IC3 on P
Claim: The frame F1 is a CNF interpolant between A and B
•A Æ ID F’1 == A F1
•F1 :B
36
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
Extending Monotone Clausal Traces by PDR
Given a PDR trace F = [Init, F1] of transition system P = (Init, Tr, Bad)
G2 -- an over over-approximation of the forward image of F1
• i.e., F1 Æ Tr G’2
Construct SAFE transition system T = (Init, Tr, Bad)•where Bad = : (G2 Ç F1)
Run PDR on T starting with a trace [Init, F1, True]
Claim: The sequence [Init, F1, F2] is a SAFE PDR trace
37
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
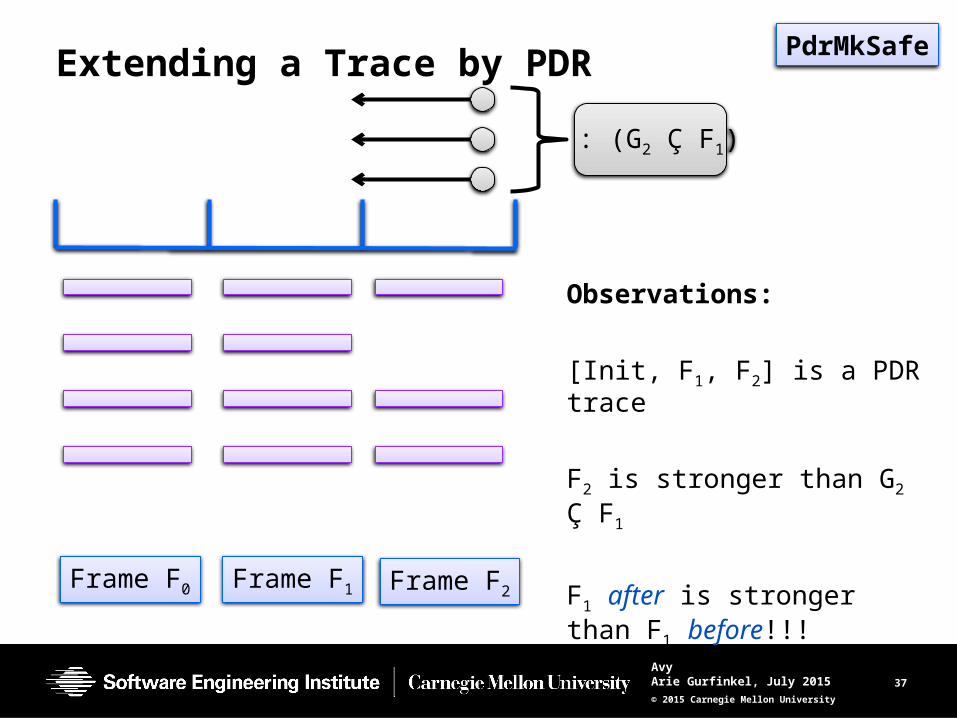
Extending a Trace by PDR
Observations:
[Init, F1, F2] is a PDR trace
F2 is stronger than G2 Ç F1
F1 after is stronger than F1 before!!!
Frame F0 Frame F1
PdrMkSafe
Frame F2
: (G2 Ç F1)
38
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
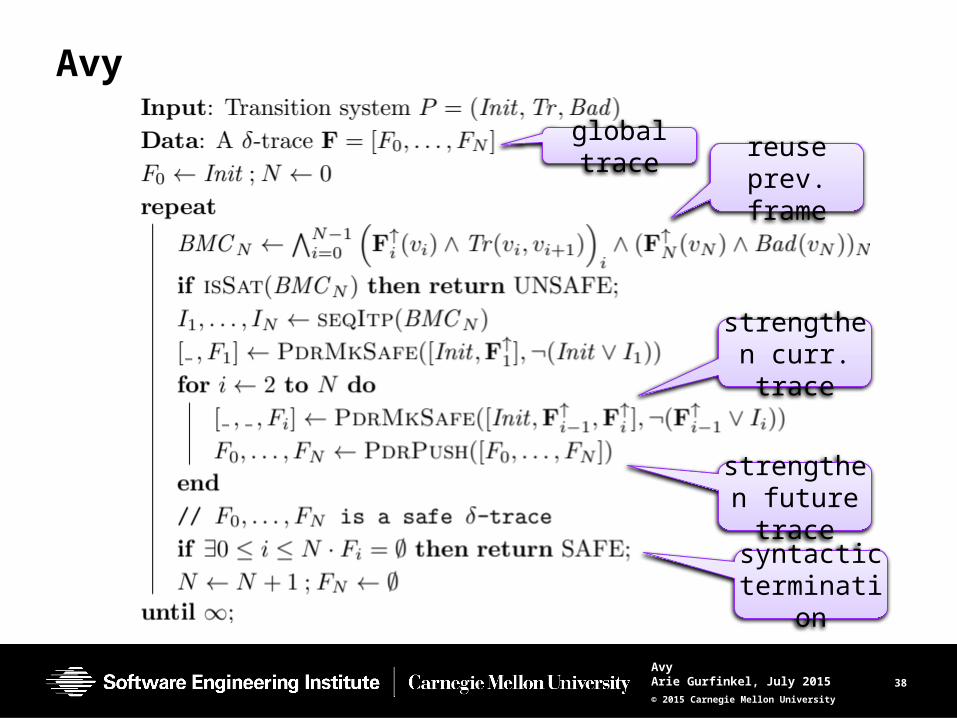
Avy
global tracereuse prev.
frame
strengthen curr. trace
strengthen future trace
syntactic termination
39
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
What is a “good” bounded proof?
Proof size is not a good indicator• the smallest resolution proof is usually not good
– depends too much on the initial state– depends too much on the bound
A “good” proof is abstract•works for many ‘similar’ transition systems
A proof is “good” if it extends a previously good proof• re-uses existing facts
40
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
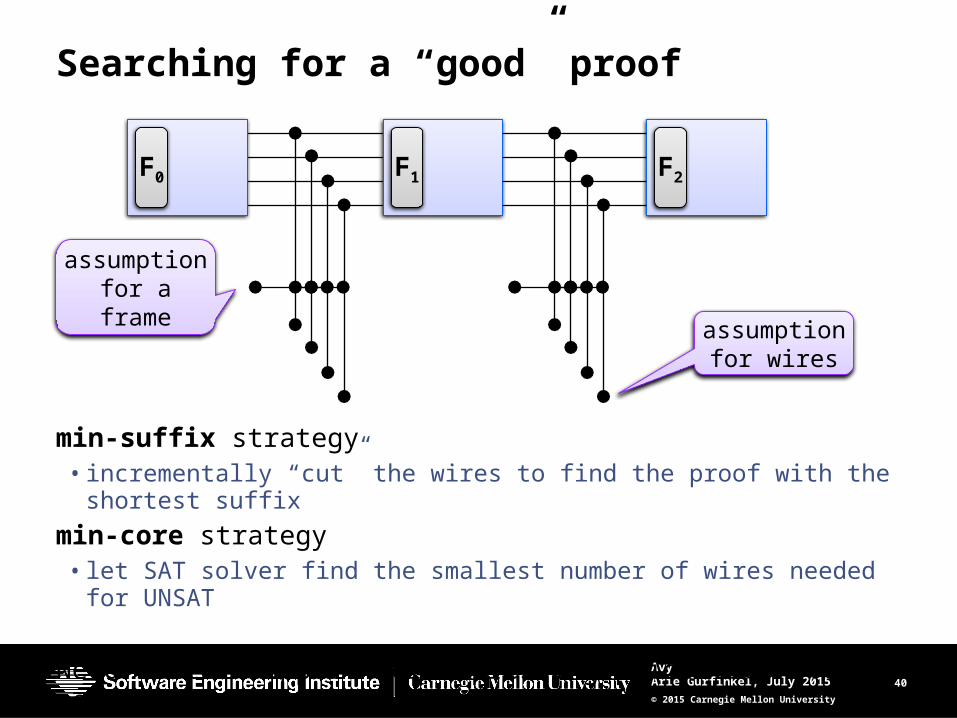
Searching for a “good” proof
min-suffix strategy• incrementally “cut” the wires to find the proof with the shortest suffix
min-core strategy• let SAT solver find the smallest number of wires needed for UNSAT
Need better support for expressing priorities over cores!!!
F0 F1 F2
assumption for wires
assumption for a frame
41
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
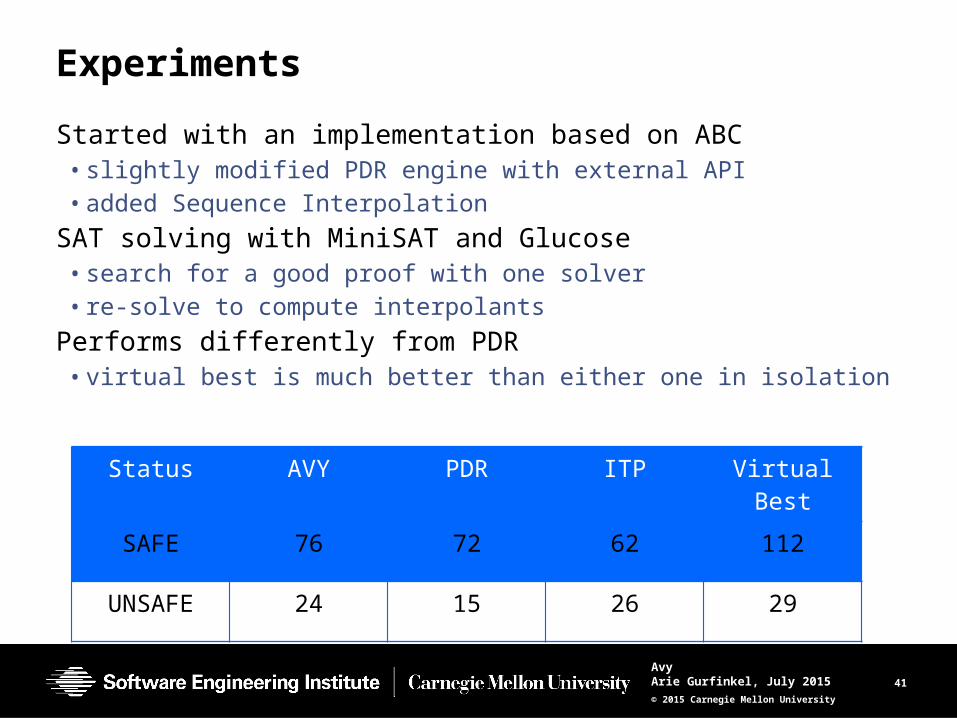
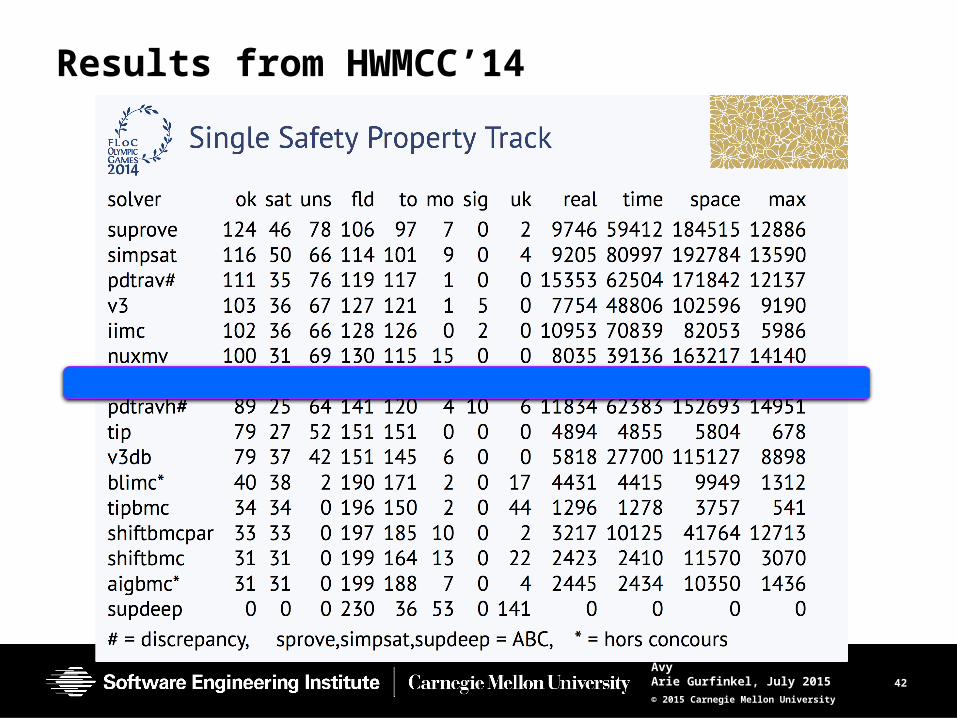
Experiments
Started with an implementation based on ABC•slightly modified PDR engine with external API•added Sequence Interpolation
SAT solving with MiniSAT and Glucose•search for a good proof with one solver• re-solve to compute interpolants
Performs differently from PDR•virtual best is much better than either one in isolation
Status AVY PDR ITP Virtual Best
SAFE 76 72 62 112
UNSAFE 24 15 26 29
42
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
Results from HWMCC’14
43
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
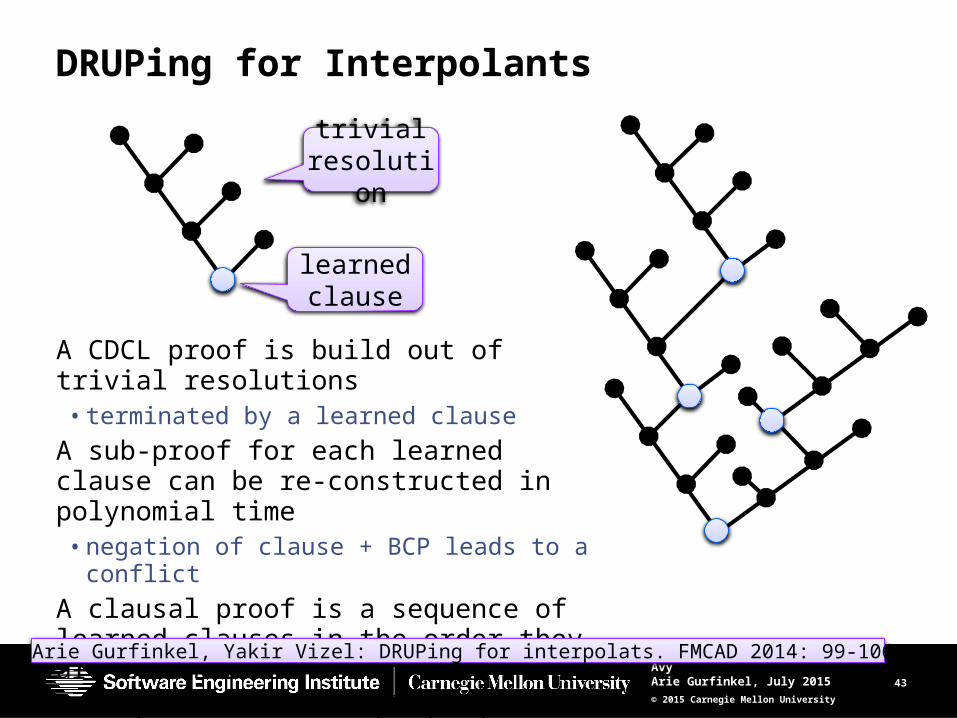
DRUPing for Interpolants
A CDCL proof is build out of trivial resolutions• terminated by a learned clause
A sub-proof for each learned clause can be re-constructed in polynomial time•negation of clause + BCP leads to a conflict
A clausal proof is a sequence of learned clauses in the order they are learnedInterpolate while replaying the proof
learned clause
trivial resolution
Arie Gurfinkel, Yakir Vizel: DRUPing for interpolats. FMCAD 2014: 99-106
44
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
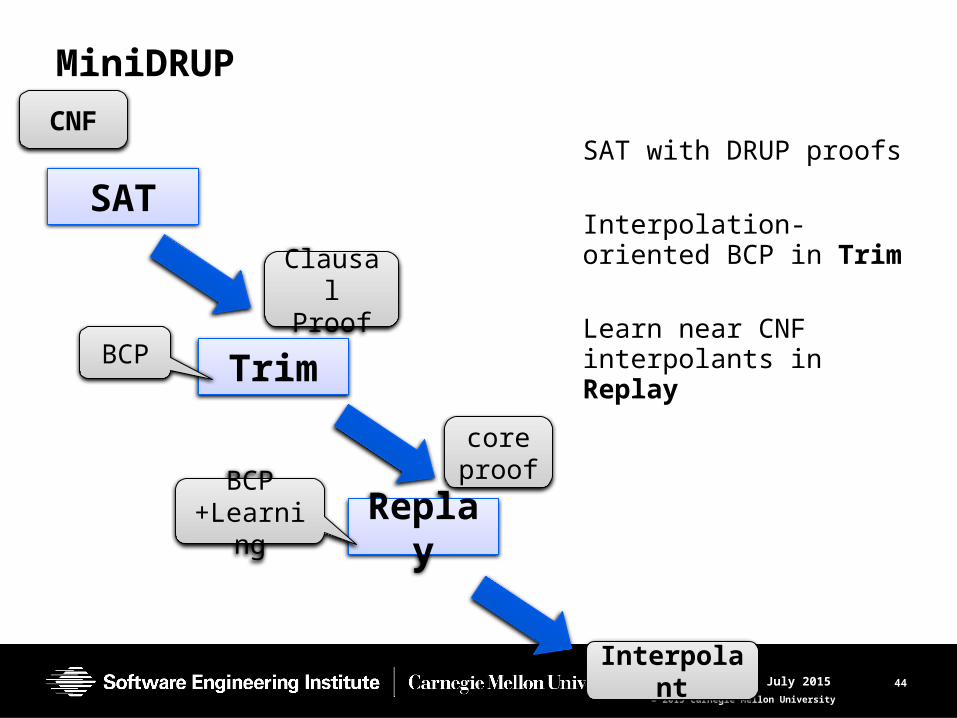
MiniDRUP
SAT with DRUP proofs
Interpolation-oriented BCP in Trim
Learn near CNF interpolants in Replay
SAT
Trim
Replay
CNF
Clausal Proof
core proof
Interpolant
BCP
BCP +Learning
45
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
Fast BMC and Interpolation
State-of-the-art in Bounded Model Checking (Fast BMC)•each successive bound is exponentially harder to solve•many advancement in SAT since first BMC•many BMC-specific advancements
– circuit-aware simplifications (sweeping, constant propagation, etc.)– use of incremental SAT for increasing verification depth– lazy addition of constraints (incremental cone-of-influence)
BMC used in IMC/Avy is different than BMC used for BMC • interpolation algorithms assume naïve BMC•circuit-aware simplifications change the structure of the formula
– no correspondence between constraints and circuit steps!• incremental SAT makes interpolation more difficult
–many SAT queries, but one proof–what to log?
Yakir Vizel, Arie Gurfinkel, Shard Malik: Fast Interpolating BMC. CAV 2015.
46
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
Future Directions
Extending to theories•easy for theories with existing interpolation procedures•BUT, still need PDR-like interpolation procedure
Extending to programs•DAG extension for handling CFG is straight forward•handling procedures (non-linear Horn clauses) is tricky
– no efficient BMC. inlining == exponential explosion
Many implementation decisions remain unexplored•other metrics for ‘goodness’ of bounded proofs (i.e., sequence interpolants)
– and corresponding proof optimization procedures•switching between PDR and IMC tactics•searching for a CNF interpolant vs adapting a given one
47
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
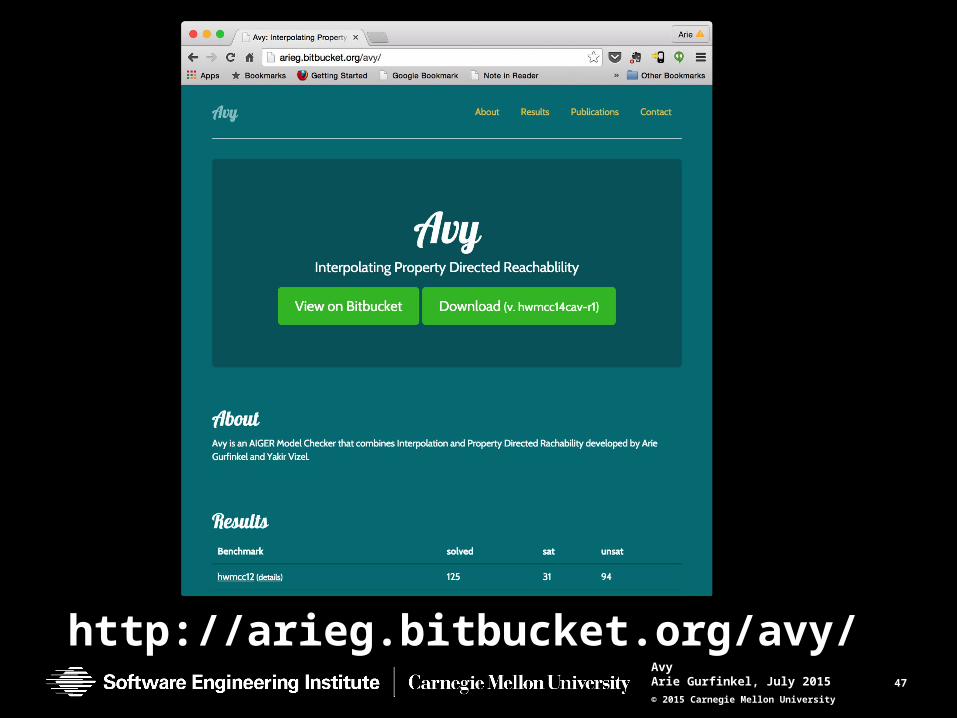
http://arieg.bitbucket.org/avy/
48
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
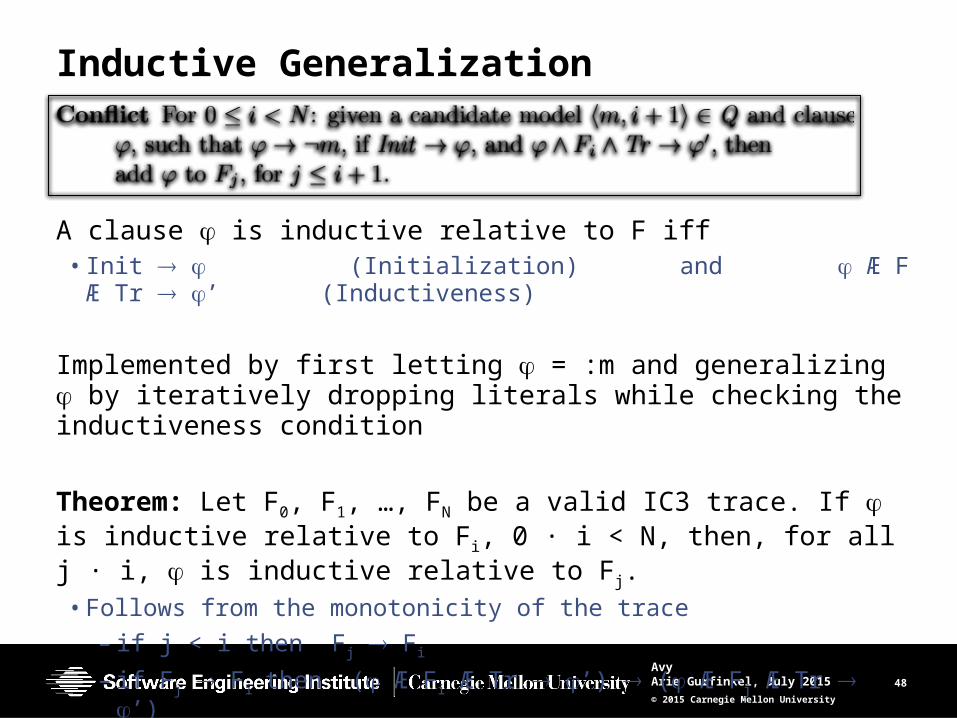
Inductive Generalization
A clause is inductive relative to F iff• Init (Initialization) and Æ F Æ Tr ’ (Inductiveness)
Implemented by first letting = :m and generalizing by iteratively dropping literals while checking the inductiveness condition
Theorem: Let F0, F1, …, FN be a valid IC3 trace. If is inductive relative to Fi, 0 · i < N, then, for all j · i, is inductive relative to Fj.•Follows from the monotonicity of the trace
– if j < i then Fj Fi
– if Fj Fi then ( Æ Fi Æ Tr ’) ( Æ Fj Æ Tr ’)
49
AvyArie Gurfinkel, July 2015
© 2015 Carnegie Mellon University
Contact Information
Arie Gurfinkel, Ph. D.Sr. ResearcherCSC/SSDTelephone: +1 412-268-5800Email: [email protected]
U.S. MailSoftware Engineering InstituteCustomer Relations4500 Fifth AvenuePittsburgh, PA 15213-2612USA
Webwww.sei.cmu.eduwww.sei.cmu.edu/contact.cfm
Customer RelationsEmail: [email protected]: +1 412-268-5800SEI Phone: +1 412-268-5800SEI Fax: +1 412-268-6257